
基于DSP28335 的PMLSM 伺服系统设计与实现
2013-12-23 04:46陈平,郑俊
组合机床与自动化加工技术 2013年1期
陈 平,郑 俊
(广东工业大学 自动化学院,广州 510006)
0 引言
应用于直线运动场合的永磁直线同步电机(PMLSM)驱动技术与传统的旋转电机加中间传动机构的驱动方式相比具有结构简单、易于维护、可靠性高、控制参数可测、且推力密度高等优点,适用于要求高精度、大推力的直线驱动场合[1]。但PMLSM 也存在一些固有的缺点:受非线性机电参数耦合影响严重,运动性能易受摩擦力、负载、电机的端部效应及推力波纹效应等因素的影响。PMLSM 直线伺服系统是个多变量,非线性,强耦合的复杂对象,这对伺服系统的软硬件设计提出了更高的要求。
采用基于交流电机动态模型的矢量控制技术可满足直线伺服系统的控制性能要求。但这种控制方法对控制芯片的运算能力有较高要求。TI 公司的TMS320F28335 具有浮点运算单元的高性能数字信号处理器,具有非常丰富的片上资源[2],正是为复杂电机控制而设计,其为直线伺服系统更快更准的控制需求提供了重要保证。
1 伺服驱动器结构及原理
PMLSM 直线伺服系统的结构如图1 所示。系统采用电流、速度和位置三闭环控制结构,其中电流环矢量控制、速度环控制器及位置环控制器都在TMS320F28335 DSP 控制芯片中实现。电流环采用Id=0 的动子磁场定向控制实现对PMLSM 的解耦控制,其包括DQ 轴电流PI 控制器、坐标变换及其反变换环节、空间电压矢量SVPWM、电流反馈采样和A/D 转换、直线光栅编码器脉冲接收与电角度计算等模块。速度环包括速度调节器及速度计算模块。位置环包括位置调节器及位置计算模块,位置调节器采用纯比例控制,只需配合适当比例参数可很好抑制位置环超调,此外为减少位置跟踪误差而加入位置前馈复合控制[3-4]。
2 系统硬件设计
系统整体硬件设计如图2 所示,系统以TI 公司DSP 芯片TMS320F28335 数字处理芯片为控制核心,由DSP 控制电路、功率驱动电路及辅助开关电源等模块组成。DSP 接收来自直线光栅编码器、电流检测模块和故障信号处理模块的信息,完成对PMLSM的控制和故障处理。光电隔离模块作为电子电路与功率主电路的接口,将PWM 驱动信号经送入IPM 模块。编码器接口将光栅编码器所记录的永磁直线同步电动机相对位置、磁极位置、限位信息和编码器报警等信息送往DSP。电机相电流经电流检测模块量测、滤波、幅度变换、限幅,转化为0 ~3V 的电压信号送入DSP 的A/D 引脚。功率主电路的过压、欠压、短路、电源掉电和IPM 故障等信号经故障检测模块检测与处理后,送入DSP 的I/O 端口。存储器模块用以存储控制参数和系统故障等系统信息。下面对系统硬件的关键模块展开阐述。

图1 直线伺服系统原理框图

图2 直线伺服系统硬件原理图
2.1 电流采样电路
高性能的电流环路是PMLSM 矢量控制的前提,故系统电流采样电路性能对系统性能具有显著影响。电流传感器采用LEM 公司采用磁通门(Fluxgate)技术研发的新一代电流传感器(CT)CAS 25-NP,其原边理论值为25A,分辨率为25mV/A,最大测量范围为85A,最大0.8%(@25℃)的系统测量误差[5]。与上一代CT LTS25-NP 相比,CAS 系列采用的检测反馈元件为Fluxgate 而非霍尔元件,其响应更快、抗扰性更强、温漂更低、体积更小且成本更低。用于采样调理电路的运放采用TI 公司的OPA2376,该器件为低噪声、低静态电流的精密运放,增益带宽达5.5MHz,具有轨至轨输出能力,适用于对传感器类小信号的处理电路。采样电路如图3 所示,实现将0~5V 的CT 采样信号衰减为0 ~3V 的信号经滤波和箝位后送入DSP 的ADC 通道。滤波带宽为36KHz,主要考虑开关频率附近的谐波及滤波器带来的相位滞后。
2.2 光栅编码器接口电路
系统所采用的直线光栅编码器为GSI 公司的MicroE M-Ⅱ4400,其栅格间距为20μm,具有可编程的插补细分倍数(X4-X400),其输出的两路正交脉冲信号最大波特率为10MHz,经过四倍频后最 大 波 特 率 为40MHz[6]。在 此 带 宽下当电机运行在2m/s高速状态时,可达到0.05μm/count(微米每脉冲)的分辨率。考虑到实际系统需要和DSP 的处理能力,将编码器细分200,即分辨率为0.1μm/count,输出信号带宽为5MHz。编码器接输出信号包括AB 两路正交脉冲、参考零点和左右限位信号,这些信号先经共模滤波器,滤波之后进入差分接收器进行接收,再经施密特触发电路进行脉冲整形,最后经光电隔离和电平转换后进入DSP 的编码器接口单元。其原理如图4 所示。
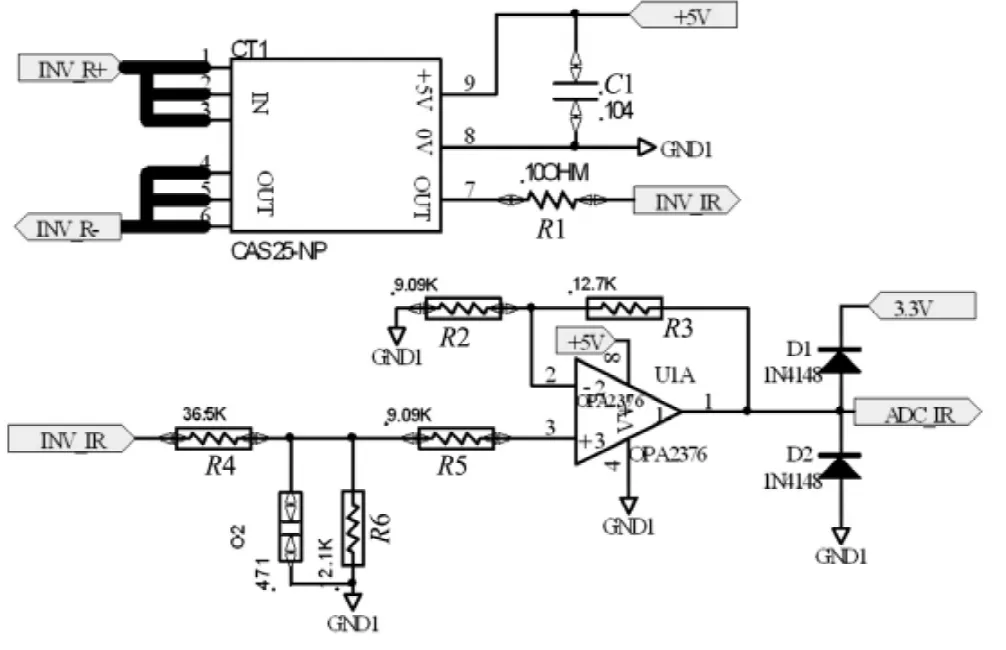
图3 电流采样电路

图4 编码器接口电路图
2.3 逆变电路设计
系统采用三菱的第五代IPM 模块PS21867,其耐压值为600V,额定电流为30A,开通延时1.2us,关断延时1.6us,最高工作频率为20KHz。模块内置IGBT驱动电路和专用HVIC 可从控制器直接接收控制信号,并集成过载保护,控制电源欠压等保护功能。由DSP 事件管理器单元产生的PWM 信号经光耦隔离后送入IPM 模块,光耦采用东芝TLP350,其最大延时小于500ns。
3 控制系统软件设计
系统主程序主要包含:①系统与各功能模块的初始化;②中断程序模块,包括PMLSM 伺服控制算法及其它中断子程序。主程序工作流程如图5 所示:系统上电复位后依次进入片内外初始化程序,然后循环执行LED 显示、键盘处理和参数计算与保存,等待中断触发到来。系统主要有两种中断即功率驱动保护中断(INT1)和PWM 中断(INT2)。
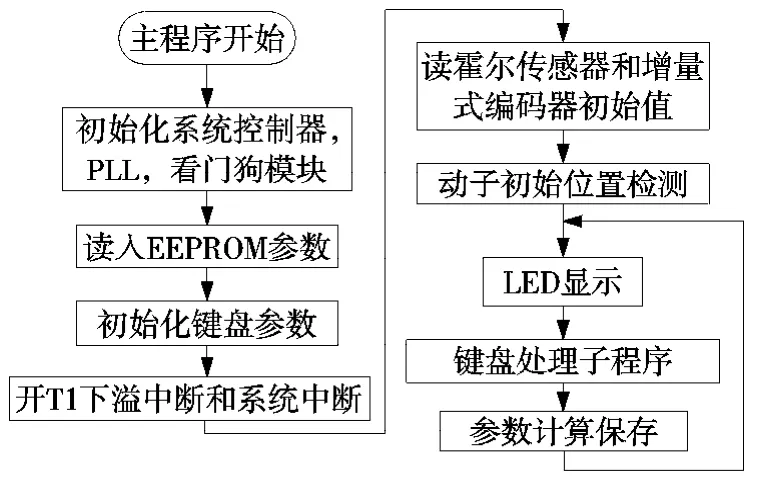
图5 系统主程序流程图
功率驱动保护中断采用硬件中断的方法。各种故障信号经逻辑组合后连到DSP 的引脚,当PDPINT电平有效,内部硬件在12ns 后将全部事件管理器输出置成高阻态,从而封锁PWM 信号。
PWM 中断服务程序在定时器(Timer 1)下溢触发时启动,完成磁场定向控制程序,实现PMLSM 的伺服控制算法[7-8]。如图6 所示当电流环时间到,PWM 中断程序调用电流环子程序,读取A/D 转换结果和编码器计数值,进行坐标变换得同步旋转坐标电流id和iq经PI 控制器和Park 逆变换进入SVPWM计算出相应的占空比并完成相应寄存器更新,实现定子电流控制算法。当速度环时间到,PWM 中断程序调用速度环子程序,读取编码器脉冲数值并计算动子的速度,然后经过PI 控制器得到iq参考值。当位置环时间到,PWM 中断程序调用位置环子程序,读取编码器脉冲数值并计算动子当前位置,经位置环控制器计算出速度参考值。
4 系统实验测试结果
系统实验采用的电机为科尔摩根公司的PLATINUM 直接驱动直线电机(DDL),动子型号为IC11-050A1ACTRC1,定子型号为MC050-1280-001,其参数如表1 所示。

图6 PWM 中断流程图
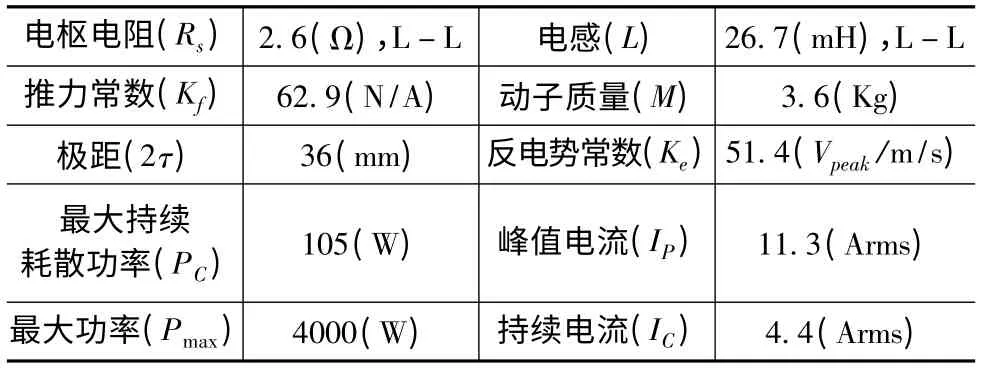
表1 直线电机参数
系统实验应当循序渐进,依照先开环后闭环,先内环后外环的顺序进行逐步调试。系统实验设置如下:PWM 开关频率为20KHz,死区时间为2.5μs;电流环和速度环采用PI 控制器,控制参数分别为:Kpc=2450,Kic=18;Kpv=0.85,Kiv=225;位置环采用比例加前馈复合控制,比例系数Kpp =0.12,前馈系数Kff=0.7。
图7 为电机运行速度为0.36m/s 时UV 两相的闭环电流波形,其频率为10Hz。

图7 电机闭环电流波形(CH3-V 相,CH4-U 相)
M-Ⅱ4400 直线光栅编码器可通过以太网接口将其位置信息传至电脑客户端实现对编码器的监控。电机初始速度为-0.03m/s,给定速度斜坡指令:以0.2m/s2加速度加速到0.03m/s,即换算为经过4 倍频后频率为8e6count/s 大小为1.2e6count 斜坡信号。速度响应波形记录如图8,速度响应小于0.03s,超调小于5%。
给定伺服指令以0.3m/s 速度运行12.5mm 距离,即给定频率为1.2 ×107Hz 的5 ×105 个(count)脉冲的信号指令。直线伺服系统位置响应如图9,响应时间为0.14s,位置定位误差为12count 即0.3μm。
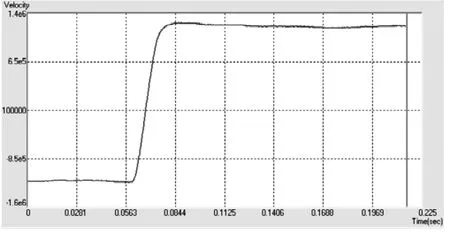
图8 系统速度响应波形
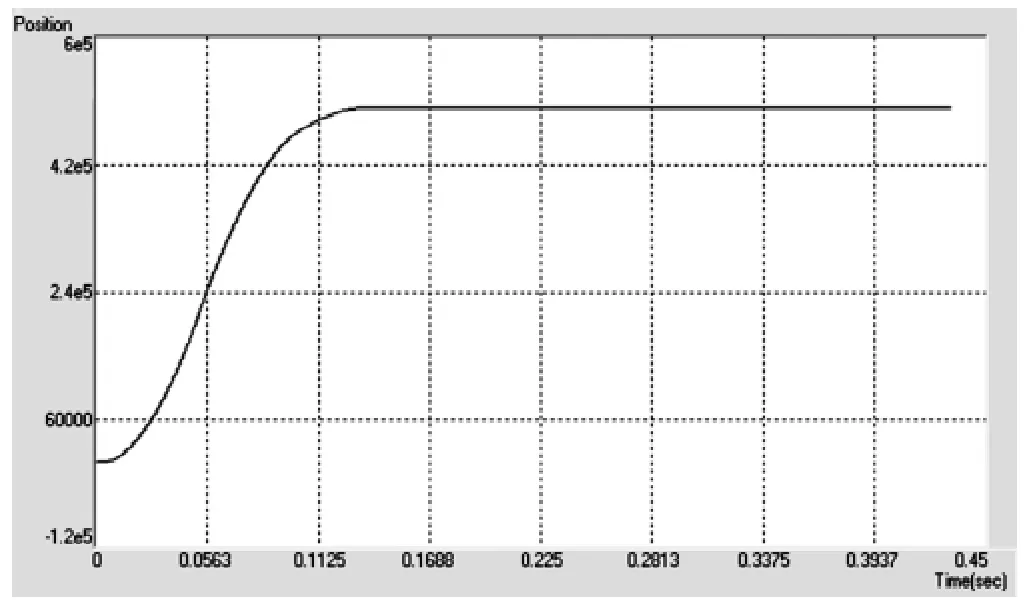
图9 系统位置响应
5 结论
本文针对应用于数控机床的永磁直线同步电机,以TMS320F 28335 DSP 控制核心,基于以智能功率模块IPM、高精度直线编码器M-Ⅱ4400 和高性能的CAS 电流传感器等为主要元件的硬件平台,实现PMLSM 伺服驱动系统的设计。实验结果表明该伺服驱动器响应快且定位精度高,说明本系统方案实现了对PMLSM 的高效控制。
[1] F. Gieras and Z. J. Piech,Linear Synchronous Motors Transportation and Automation Systems. Boca Raton,FL:CRCPress,2000.
[2]Lori Heustess. TMS320x280x to TMS320x2833x or 2823x Migration Overview[J]. Texas Instrument Application Report,2008,7.
[3]滕福林,胡育文等.交流伺服系统位置跟踪误差[J].南京航空航天大学学报:2008,40(6):815-819.
[4]E. J. Adam,J. L. Marchetti. Designing and tuning robust feed forward controllers[J].Computer and Chemical Engineering,2004(2):1899-1911.
[5]LEM. Current transducer CAS Series Data Sheet[R/OL].
http://www.lem.com/docs/products/cas%20series.pdf.
[6]MicroE Systems. Mercury II 4400 Data Sheet[R/OL]. http://www.microesys.com/m2/m2Datasheets.html.
[7]Texas Instruments. Field Oriented Control of Three phase AC-Motors[R].USA:Texas Instruments,2006.
[8]Ying-Shieh Kung. Design and Implementation of a High-Performance PMLSM Drives Using DSP Chip[J]. Industrial Electronics,2008,55(3):1341-1351.
(编辑 李秀敏)
猜你喜欢
网络安全与数据管理(2022年1期)2022-08-29
北京航空航天大学学报(2022年6期)2022-07-02
数码世界(2019年12期)2019-12-01
智能计算机与应用(2018年6期)2018-10-31
制造技术与机床(2017年7期)2018-01-19
时代英语·高二(2017年4期)2017-08-11
制造技术与机床(2017年3期)2017-06-23
北京航空航天大学学报(2016年4期)2016-02-27
探测与控制学报(2015年4期)2015-12-15
弹箭与制导学报(2015年1期)2015-03-11
