
一种面向车辆闯黄灯和处理两难区问题的控制策略
2013-12-17 08:23:30刘润乔韩加蓬
山东理工大学学报(自然科学版) 2013年6期
刘润乔, 韩加蓬
(山东理工大学 交通与车辆工程学院, 山东 淄博 255091)
我国新交通法规定:驾驶机动车违反道路交通信号灯通行的,一次记6分[1].此次规定黄灯表示警示,闯黄灯属于违反道路交通信号灯通行.法规认定:黄灯亮时,只要机动车车身任何一部分已越过停止线,车辆可继续通行,不定为闯黄灯.如没过线则应刹车停住,哪怕越过斑马线也要停住,只要停住就不处罚.
防止车辆闯黄灯不仅能提高交叉口的安全性,还能显著减小车辆陷入两难区的概率.两难区是驾驶员在交叉口处既通不过也停不下的区域,即驾驶员在看到黄灯亮后既不能安全停在停止线上,又不能在不超速违规行驶的前提下顺利通过交叉口,无论驾驶员选择停还是行,在红灯期间都将落在交叉口内[2].
迄今为止,国内外学者在黄灯时间调整和两难区预警控制中获得了大量研究成果.李克平等[3]在黄灯时间优化方面进行研究分析,提出适合中国国情的最小黄灯时间;张存保等[4]通过车路协同技术提出了降低两难区概率的改善方法.本文对车载预警和黄灯控制进行深入研究,提出一种面向车辆闯黄灯和处理两难区问题的控制策略.
随着智能交通系统(ITS)的发展,安装有中央处理器的信号灯可随时变换时间,不再有信号灯倒计时显示[5].为了让驾驶员实时获取信号灯的变换时间以及降低车辆闯黄灯和陷入两难区事件的发生,本文设计车载预警控制策略,通过ZIGBEE实时获得剩余绿灯时间T1和车辆到交叉口的距离S1,根据GPS实时测得车速v和制动减速度a,以及计算出的制动距离S,凭借以上参数对车辆是否将要闯黄灯进行实时监控和预警提示.此外还设计了黄灯控制策略,通过ZIGBEE实时获取交叉口处车辆的位置、车速、排队情况等信息,并根据交叉口处车辆的实际排队情况和车速设定黄灯合理时间,并对黄灯结束期间还未离开交叉口的车辆进行黄灯延时控制,让其顺利通过交叉口.
1 车载预警控制策略
1.1 车载预警系统
车载预警可有效降低车辆闯黄灯事件的发生,进而减小车辆陷入两难区的概率.
车载预警系统结构如图1所示,主要包括ARM微处理器、GPS模块、ZIGBEE无线通信模块、交通信息检测模块、报警模块以及显示模块等.

图1 车载预警系统结构示意图
车载系统的控制中心采用32位ARM嵌入式微处理器;GPS采用载波相位实时差分获得多普勒观测值,然后计算速度值,测速精度在0.03m/s左右;通过ZIGBEE实时获取交叉口信号灯的变换时间,还可实时获得车辆到交叉口的距离,该距离参数可通过交通信息检测模块中的环形线圈式车辆检测器或视频检测器获取,由ZIGBEE传给车载系统.
1.2 制动距离和制动减速度分析
1.2.1 理论分析
图2为驾驶员在接受了紧急制动信号后,制动踏板力Fp、汽车制动减速度ab与制动时间τ的关系曲线.

图2 制动踏板力、汽车制动减速度与制动时间的关系曲线图
整个制动过程可分为驾驶员反应时间τ1,制动器起作用时间τ2,持续制动时间τ3,放松制动器时间τ4四部分.
其中汽车的制动距离是指制动器起作用和持续制动两个阶段汽车驶过的距离.根据汽车理论知识,制动距离计算公式为[6]
(1)
整个制动过程的总制动距离为
(2)
式中:ua0是制动初速度,abmax是最大制动减速度.
实际制动过程中的最大制动减速度会随着路面状况的变化而变化.最大制动减速度为
abmax=φp·g
(3)
式中φp为峰值附着系数,不同路面的峰值附着系数见表1.

表1 不同路面的峰值附着系数
1.2.2 紧急制动和普通制动分析

(1)紧急制动时,要使车辆在一瞬间制动,需立即猛踩制动踏板,此时汽车的最大减速度可由式(3)得到,即
abmax=φp·g=0.7×9.8=6.86(m/s2)

(2)普通制动时,可以柔和地踩刹车使车辆平稳停住,通常制动减速度最大为3m/s2,否则会使乘客感到不舒服或发生危险,将其代入式(2)得
1.2.3 实际制动分析
实际制动时,交叉口处车辆速度v可通过GPS获取,制动减速度a可通过短时间内速度变化率来获得,即
(4)
式中:v1、v2分别表示前后时刻GPS测得的车速;Δt表示测量的时间间隔.
由式(2)可知,制动距离S为
(5)
式中:v为制动初速度,a为制动减速度.
1.3 最大剩余绿灯时间分析
由图2可知整个制动过程的制动时间T为
(6)
普通制动时制动时间T≈5s,该制动时间即为车辆可能闯黄灯的最大剩余绿灯时间.
1.4 车载闯黄灯预警控制策略
通过ZIGBEE实时获得剩余绿灯时间T1和车辆到交叉口的距离S1,根据GPS实时测得车速v和制动减速度a,以及求得的制动距离S,凭借以上参数对车辆是否将要闯黄灯进行实时监控.
但普通制动下车辆会缓慢制动,如果在黄灯启亮之后以此制动状态越过停止线,虽然新交通法规定只要停住就不罚,但可能会被认为没有刹车停住而被误判为闯黄灯.所以需对车辆进行紧急制动报警.


图3 车载闯黄灯预警控制流程图
2 黄灯控制策略
2.1 黄灯控制系统
黄灯时间的调整可显著减小车辆进入两难区的概率[7],提高交叉口的安全性.
黄灯控制系统结构如图4所示,该系统以AT89S52单片机为控制核心,通过ZIGBEE实时获取交通信息检测模块采集的交叉口车辆位置、车速、排队情况等信息,并将其传给黄灯控制系统.

图4 黄灯控制系统结构示意图
2.2 黄灯合理时间模型
黄灯合理时间指黄灯亮时刚越过停车线的车辆完全通过交叉口的时间,之后的车辆在黄灯亮后安全停在停车线外.该时间为司机的反应时间、汽车通过交叉口的行驶时间和汽车减速停车的时间总和.

(7)
在无车辆排队的情况下,黄灯合理时间为
(8)
在有车辆排队的情况下,黄灯合理时间为

(9)
2.3 黄灯控制策略
通过ZIGBEE实时获取交通信息检测模块采集的交叉口车辆位置、车速、排队情况等信息.将交叉口处车辆的实际排队情况和车速代入模型中,求出黄灯合理时间,并对黄灯结束期间还未离开交叉口的车辆进行黄灯延时控制,让其顺利通过交叉口.黄灯控制流程图如图5所示.
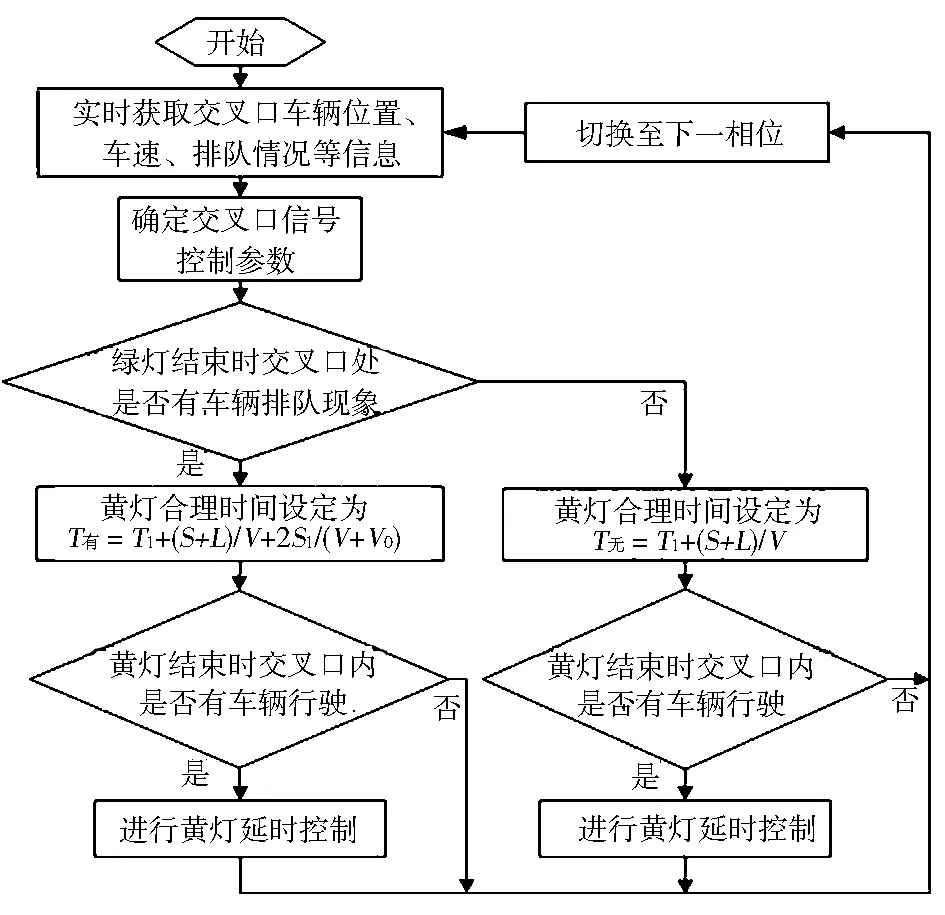
图5 黄灯控制流程图
2.4 算例分析
参数设置:
车长L=4.5m
交叉口的大小:S=15m
两汽车间的距离:S1=2m
在有车辆排队的情况下汽车的行驶速度:V=20km/h
在无车辆排队的情况下汽车的行驶速度:V=40km/h
司机的反应时间:T1=0.7s
停车速度:V0=0km/h
(1)无车辆排队的情况下
所以在无车辆排队的情况下,黄灯合理时间T无=T1+T2=2.455s,如图6所示.

图6 无车辆排队的情况下黄灯合理时间
(2)有车辆排队的情况下

所以在有车辆排队的情况下,黄灯合理时间T有=T1+T2+T3=4.93s,如图7所示.

图7 有车辆排队的情况下黄灯合理时间
2.5 初值计算
进行程序编写时,可选择方式1作为其定时方式,即M1M2=01时,定时最大值为65.536ms.对于定时器来说,公式如下:x=M-(定时值/T),其中M为其最大计数值即2^16.单片机晶振为12MHz时,T=1μs.
若求出有车辆排队的情况下黄灯合理时间为4.9s,进行程序编写时可先设定时值为5ms,则x=2^16-5ms/1μs=EC78H,初值为EC78H,初值低8位78H写入TL1,高8位ECH写入TH1,再在原来5ms基础上循环980次,用DJNZ条件指令作为循环语句,即可得到4.9s定时.
3 结束语
由于新交通法规定黄灯亮时未越过停止线的车辆要刹车停住,所以本设计只对绿灯亮时或黄灯刚亮起时车身任何一部分已过线的车辆进行相应的黄灯延长控制,其他情况应制动停车,不对其进行黄灯延时控制.
本次设计的车载预警控制和黄灯控制策略,算法简单可行,车辆和信号灯参数的获取具有实时性,符合实际路况的需求,能够显著降低交叉口车辆闯黄灯和处于两难区事件发生的概率.
[1] 机动车驾驶证申领和使用规定(公安部令第123号)[Z].北京:中华人民共和国公安部, 2013.
[2] 陈雪峰,马万经.信号协调条件下交叉口两难区仿真分析[J].交通科学与工程, 2011, 27(3): 87-93.
[3]李克平,杨佩昆,倪颖.城市道路交叉口信号控制中的黄灯问题[J].城市交通, 2010, 8(4): 67-72.
[4] 张存保,陈超,严新平.车路协同下信号控制交叉口两难区问题改善方法[J].中国安全科学学报, 2012, 22(6): 86-91.
[5] 高云峰,胡华.有倒计时的信号控制交叉口的绿灯间隔时间[J].公路交通科技, 2013, 30(2): 99-103.
[6] 余志生.汽车理论[M]. 5版.北京:机械工业出版社, 2010.
[7] 钱洪波,韩皓.再论道路交叉口信号控制中黄灯信号问题[J].交通信息与安全, 2012, 30(5): 94-101.
猜你喜欢
数学小灵通·3-4年级(2021年3期)2021-04-13 01:04:02
军事文摘·科学少年(2017年6期)2017-09-04 15:06:36
重庆交通大学学报(自然科学版)(2017年3期)2017-05-17 03:37:32
中国房地产业(2016年2期)2016-03-01 01:25:37
燕山大学学报(哲学社会科学版)(2015年3期)2016-01-05 17:28:45
伴侣(2015年5期)2015-09-10 07:22:44
系统工程学报(2015年3期)2015-02-28 19:54:01
河南科技(2014年14期)2014-02-27 14:12:02
中国化肥信息(2014年37期)2014-02-27 13:41:23
聪明泉·少儿版(2008年4期)2008-05-20 09:24:46
