
1米太阳望远镜光轴变化实测*
2013-12-16 07:26:28校启公柳光乾邓林华程向明
天文研究与技术 2013年2期
校启公,柳光乾,邓林华,程向明
(1. 中国科学院云南天文台光电实验室,云南 昆明 650011;2. 中国科学院研究生院,北京 100049)
为了满足天文望远镜对目标进行高时空分辨观测的要求,现代天文望远镜均配备了较灵敏的光电导行系统,导行系统的信标通常从主光学系统中引出,如云南天文台丽江天文观测站2.4 m望远镜。但也有一些特殊结构的望远镜,如云南天文台1 m太阳望远镜(New Vacumm Solar Telescope, NVST),为改善望远镜观测时大气视宁度的状况,采用了真空镜筒,其导行系统的信标来自于独立装配在镜筒背上的导星镜[1]。独立结构的导行系统工作时,必须保证其光轴与望远镜光轴平行,但在望远镜跟踪过程中,由于受到重力的影响,支撑望远镜主副镜的镜筒或桁架会弯沉,另外导星镜机械支撑也会产生一定变化,从而影响光电导行系统的正常工作。
1 m太阳望远镜一方面对主副镜的支撑镜筒进行了等弯沉设计,另一方面采用短焦距的导星镜,加强支撑结构和镜筒刚度,导星镜镜筒最大变形控制在1″[2]。虽然该望远镜在设计上充分保证了两个光轴相对变化为最小,但望远镜最终安装运行的效果不得而知。其中,望远镜光轴的弯沉是造成光轴不平行的主要因素之一,本文从数值模拟上重点讨论,另外还对该望远镜光轴与导星镜光轴的相对变化进行了实测,分析其变化范围和规律。
1 1米太阳望远镜主体结构
1 m太阳望远镜有效口径为0.98 m,有效焦距约45 m,光学系统是修正的格里高利(Gregorian)系统,机架结构为地平式(方位-高度)装置,真空镜筒直径为1.2 m。如图1(a),导星镜安装在望远镜镜筒背部,口镜为5 cm,焦距为38.9 cm。
图1(b)是1 m太阳望远镜光学系统图,安装在真空镜筒内,太阳光从封窗W1入射,依次经过M1、M2、M4、M3、M5、M6、M7,最后经45°镜进入高分辨成像系统。其中主镜M1是抛物面反射镜,M2和M3是椭球面反射镜,M4、M5、M6和M7是平面反射镜。望远镜在跟踪过程中,M1、M2、M4、M3、M5、M6、M7随方位转动,M1、M2、M4随高度转动。由于镜筒是M1、M2的支撑机构,在重力作用下镜筒前后两端会发生形变,主副镜M1和M2的位置及其转角都会发生变化,随着镜筒指向高度的变化,即使星像稳定在导星镜中心,在高分辨率成像系统中星像位置也会不断变化,如果承载高分辨率成像系统的光谱仪转台不进行消旋,星像变化轨迹将有径向的变化,也有轴向的变化。
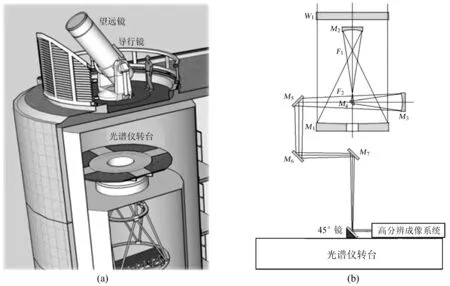
图1 1 m太阳望远镜结构及其光学系统
2 NVST主镜光轴弯沉及对跟踪精度的影响
2.1 主镜光轴弯沉的基本模型
光轴弯沉在望远镜机械设计时一般都会给予充分考虑[3],对于1 m太阳望远镜,进行了等弯沉设计,其总体结构是:主镜采用桁架结构与中间块相连,副镜通过真空镜筒筒壁与中间块相连,这种结构使得主镜可以避免产生转角,而副镜将因真空镜筒的变形而产生转角。为了减小望远镜镜筒的变形,在镜筒内壁添加24道凹形竖筋、4圈横筋进行加强。图2(a)为1 m太阳望远镜镜筒的简化有限元模型,得到弯沉随镜筒指向高度的变化,如图2(b),采用间隔为高度角每隔10°,然后采用最小二乘法拟合,获得了弯沉随镜筒指向高度的变化关系:
δ=7.610 5×10-6E3-0.001 4E2+0.014 4E+5.131 0
(1)
式中,δ代表弯沉;E代表望远镜的高度角。分析表明镜筒最大弯沉约5″。

图2 1 m太阳望远镜的有限元模拟及弯沉的拟合曲线
2.2 光轴弯沉引入的跟踪误差
光轴弯沉对控制系统的影响主要是引入定位跟踪误差,因此当望远镜跟踪某一颗星时,跟踪误差变化曲线就带有光轴弯沉信息。由于影响望远镜定位跟踪的误差因素众多,模拟时只考虑光轴弯沉引入的跟踪误差。根据1 m太阳望远镜的光学结构,存在光轴弯沉时,星像在平面镜M4上的轨迹随高度角的变化是一条直线,如图3。
图3中,点O表示光轴在M4上的位置,由于光轴不能准确知道,且存在初始定位误差,因此将镜筒指向高度为地平时星像的位置点设为S1,星过中天,镜筒指向天顶时星像所在点设为S2。对星进行东升西落的连续观测时,星像在直线上的运动速度就是光轴弯沉随高度的变化规律,且从点S1运动到点S2再回到S1,S1到S2之间的距离为最大光轴弯沉量。设C代表中间某一时刻星像的位置,C到光轴的距离为R,转角Ag为它与光轴O之间连线和X轴的夹角。当星像进入1 m太阳望远镜的高分辨成像系统时,由于存在像的旋转,情况会变得更为复杂。其中弯沉不但影响像的旋转半径,还会影响像的旋转角度,其中旋转半径变化R为:

图3 星像在M4的轨迹
Fig.3 The track of the image ofM4

(2)
(2)式中,假设O为坐标原点,C点的坐标为(Xc,Yc)。考虑到望远镜跟踪本身还引入像的旋转,根据文[4],旋转角表示为:
θ=(A-π)+(E-π/2)
(3)
式中,A代表望远镜方位角;E代表望远镜高度角。除此之外还要考虑光轴弯沉引入的旋转角Ag:
Ag=tan-1(Yc/Xc)
(4)
可以得到总旋转角度为:
θF=(A-π)+(E-π/2)+Ag
(5)
因此,给定星像初始点,就可以根据光轴弯沉的变化公式(1),以及R和θF,得到模拟星像在高分率成像系统的CCD上的运动轨迹,如图4。
图4中,(a)~(d)分别表示起点S1在第一象限、第二象限、第三象限、第四象限的星像轨迹模拟图。从模拟结果可知,光轴定不准和星的初始指向误差对观测结果的影响很大,星像变化轨迹大不相同。星过天顶时,一般光轴弯沉变化很小,这时跟踪误差曲线的变化主要是像的旋转引起,变化趋势为圆的轨迹,其圆心即光轴中心。
3 光轴相对变化的实测
3.1 实测方法
由于影响望远镜定位跟踪的误差因素众多,实测时必须采用导星镜闭环跟踪消除其他的跟踪误差因素。但这种观测模式严格来讲测得的值不是望远镜系统的光轴弯沉,而是望远镜光轴与导星镜光轴的相对变化量。考虑到导星镜本身结构的稳定性,这种相对变化量可近似表示为望远镜的弯沉,进行光电导行闭环跟踪消除其他的跟踪误差因素量。
根据1 m太阳望远镜的运行情况,选取尽量接近天顶的亮星作为观测目标,然后对该星进行闭环跟踪,时间跨度为所能观测到该星的整个夜晚,空间跨度要求主镜的镜筒指向高度从地平运动到天顶,尽量达到望远镜高度轴能工作的极限范围。然后通过1 m太阳望远镜高分辨率白光成像系统不断采集星像在CCD上的重心位置,镜筒指向高度较低时,采样间隔为高度每变化20″,星过中天前后,由于像场旋转的影响,则相应加快采样速度,采样间隔分别为高度每变化10″、5″和1″。光电导行反馈信号取自于星在导星镜CCD上的重心坐标,闭环跟踪时其跟踪误差的方位和高度角的均方根值在1″内,因此可以认为导星镜的光轴是保持不变的。

图4 不同起始位置的星像轨迹模拟
Fig.4 The simulation of the tracks of a stellar image with different starting locations
3.2 实测结果及变化规律
实测选取的目标星的赤经为14 h 16 m 15.21 s,赤纬为19°6′54.8″,实测日期是2012年3月28日,星从东边高度为11°升到天顶最大84.56°再降到西边36°。星像曝光时间为1 s,每个点取样5次,求重心并平均,最后测得星像在1 m太阳望远镜高分辨率成像系统的CCD上变化轨迹如图5。
光轴弯沉在天顶附近变化很小,星像轨迹变化主要由像场旋转引起,所以用高度角大于80°的数据点拟合圆,求得的圆心O即为理想光轴位置。各星像重心到圆心O的距离如图6,即图3中所表示的R。图6中的最小R值即图3中所表示的d。
根据不同的R和d,可以求得各星像C到图3中S2点的距离。如图7, 图7(a)是星过中天前的数据,即东边;图7(b)是星过中天后的数据,即西边。通过图7(a)采用最小二乘法拟合得到1 m太阳望远镜随镜筒指向高度的变化规律为:
δ=0.053×(0.001 2E3-0.098 4E2-12.128 5E+1 008.8)
(6)
式中,0.053是高分辨率成像系统的CCD比例尺。
拟合后的曲线如图7中实线所示,东西方向两图都很吻合,说明光轴变化只与镜筒指向高度有关,与镜筒指向的方位无关,这一点在图6中表现更清楚。镜筒指向高度从84.56°变化到11°时,望远镜光轴与导星镜的光轴相对变化量为46″。

图5 实测星像运动轨迹
Fig.5 Observed track of a stellar image

图6 光轴变化随方位角的变化关系

图7 光轴变化随高度角变化关系
Fig.7 Relation between optic axis and altitude (for the East & West sides, respectively)
对(6)式微分,还可以得到弯沉变化速率随望远镜高度角的变化关系(如图8),分析图8得到:当镜筒指向高度由零度逐渐变大时,弯沉变化速度逐渐增大,其中镜筒指向高度在28°左右,弯沉变化最快,达到0.8 ″/°,然后变化速度又逐渐减小,到天顶基本为零。
4 小 结
望远镜光轴弯沉与其具体的结构设计、材料和制造工业等有关。本文所采用的模拟和实测方法也只是针对1 m太阳望远镜,实际测得的值是望远镜光轴相对于导星镜光轴的变化,与望远镜光轴弯沉有一定的差别,差别大小取决于导星镜机械结构的稳定性,要把这两者完全分别测出来,还有待深入研究。但对1 m太阳望远镜来讲,光电导行正是要考虑光轴的相对变化。实测的结果表明,光轴的相对变化高达46 ″,远大于理论设计的预期值,而且镜筒指向高度在28°附近时,最大变化速度为0.8 ″/° ,约10 ″/h。因此,当进行太阳光谱这类需要长时间曝光观测的目标时,光电导行闭环跟踪必须引入光轴变化改正模型,其模型可以参考本文的实测值。

图8 光轴变化速率与高度角的关系
Fig.8 Relation between optic-axis shifting speed and altitude
致谢:感谢刘忠研究员的指导和关心,同时也感谢付玉、李雪宝、郑艳芳、王瑞等在工作中给予的帮助。
[1]邓林华, 柳光乾, 程向明, 等. 1 m红外太阳望远镜光电导行系统的反馈控制分析[J]. 天文研究与技术——国家天文台台刊, 2009, 6(4): 310-318.
Deng Linhua, Liu Guangqian, Cheng Xiangming, et al. Analysis of the feedback-control system of the auto guide system of the 1m infrared solar telescope of the Yunnan Observatory[J]. Astronomical Research & Technology——Publications of National Astronomical Observatories of China, 2009, 6(4): 310-318.
[2]程向明, 陈林飞, 许骏, 等. YNST光电导行设计[J]. 天文研究与技术——国家天文台台刊, 2011, 8(2): 196-204.
Cheng Xiangming, Cheng Linfei, Xu Jun, et al. Mechanical design of the auto-guiding telescope of the YNST[J]. Astronomical Research & Technology——Publications of National Astronomical Observatories of China, 2011, 8(2): 196-204.
[3]程景全. 天文望远镜原理和设计[M]. 北京: 中国科学技术出版社, 2003.
[4]柳光乾, 付玉, 程向明. 1 m太阳望远镜光谱仪像旋转及消旋控制[J]. 天文研究与技术——国家天文台台刊, 2012, 9(1): 86-92.
Liu Guangqian, Fu Yu, Cheng Xiangming. Image-field rotation and control of counter rotation for the spectrograph of the 1m solar telescope of the Yunnan Observatory[J]. Astronomical Research & Technology——Publications of National Astronomical Observatories of China, 2012, 9(1): 86-92.
[5]张志涌. 精通MATLAB[M]. 北京: 北京航空航天大学出版社, 2001.
[6]叶修梓, 陈超祥. SolidWorks Simulation基础教程[M]. 北京: 机械工业出版社, 2009.
猜你喜欢
中国交通信息化(2022年12期)2022-02-11 12:05:14
中学生数理化(高中版.高考数学)(2021年6期)2021-07-28 06:19:00
环境技术(2021年2期)2021-07-03 14:55:24
摄影之友(2020年12期)2020-12-23 09:39:39
百科探秘·航空航天(2020年2期)2020-03-02 07:44:43
天文学报(2018年6期)2018-12-20 08:45:50
传媒评论(2017年8期)2017-11-08 01:47:36
应用光学(2014年3期)2014-06-01 03:37:36
应用光学(2014年6期)2014-03-27 02:03:30
空间控制技术与应用(2008年5期)2008-12-12 05:38:57
