工业机器人辅助3D 激光扫描测量系统的轨迹规划
2013-12-14 09:05张之沣汪苏苗新刚郑娇
机床与液压 2013年17期
张之沣,汪苏,,苗新刚,郑娇
(1. 北京建筑工程学院电气与信息工程学院,北京100044;2. 北京建筑工程学院北京市安全监测工程技术研究中心,北京100044)
计算机辅助测量系统在飞机装配线中主要用来测量和定位各种工艺装备,或直接用来定位飞机的装配构件,是飞机数字化装配系统的重要组成部分。与传统的三坐标测量机测量方式相比,数字化测量技术具有非接触、速度快、便携性好以及测量范围大等特点[1]。
作者通过分析复杂结构件装配检测一体化系统的相关组成部分以及零件装配的相关过程,建立了适用于该平台的测量检测系统。该系统利用结构光进行3D 激光扫描测量,具有很高的精度和实时性。
1 工业机器人辅助3D 激光扫描测量系统的原理
1.1 激光三角测量原理
如图1 所示,使用激光三角法测量物体表面高度坐标原理为用一束激光以某一角度照射在被测物体表面,之后从另一角度对物体表面上的激光光线进行成像,物体表面的激光照射点的高度位置不同,因此接收反射或散射光线的角度也不同[2]。利用CCD 相机测出光线像的位置,利用公式就可以计算出主光线偏移的位移,然后计算出物体表面激光照射点的位置的高度[3]。当物体表面沿激光线的方向有位移变化时,测量结果将发生改变,从而实现利用激光和CCD 相机测量物体的位移。
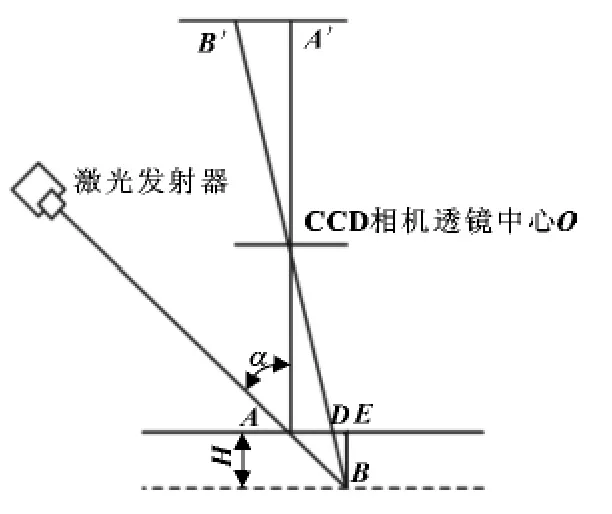
图1 激光三角测量原理
利用结构光进行3D 测量时,依照三角测量原理,光源把黑白间隔的条纹图案投射到被测量的区域上,然后用CCD 工业相机来记录结果图案。在测量过程中,CCD 工业相机被固定在一个与激光线光轴有一预定夹角的倾斜位置。然后通过条纹的密度或者条纹形状的改变信息可以反推出被测物体的三维特性。
1.2 3D 激光扫描测量系统的建立
在复杂结构件装配检测一体化系统中,3D 激光扫描测量系统是一个子系统,主要由激光发生器、CCD 高速工业相机、图像采集卡、ABB 机器人、辅助运动机构等组成,如图2 所示。将CCD 高速工业相机装载于ABB 机器人末端,将机器人安装于平行于装配平台y 轴的滑动导轨上,能够实现CCD 相机的多自由度运动,完成对形状复杂、装配关系复杂的结构件的三维形状及位置数据的测量[4-5]。该系统选用Photonfocus MV-D1024E-3D01-160-CL 型相机。

图2 机器人辅助激光扫描测量系统
2 3D 激光扫描测量系统模型的建立
2.1 辅助机器人坐标系的模型建立
该系统中采用的机器人是瑞典ABB 公司的IRB1410 型关节式机器人,其结构如图3 所示,机器人具有6 个自由度,第6 轴末端的夹持工具盘可以实现三坐标的位置控制和三姿态角的姿态控制,关节控制精度达到0.04 mm。
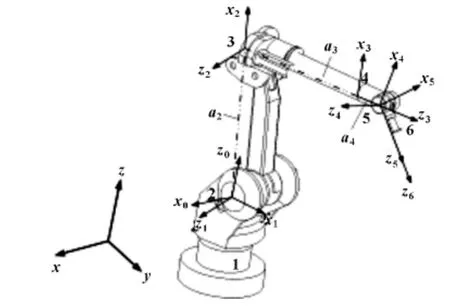
图3 6 自由度机器人参考坐标系
用D-H 表示法对机器人建模。
从表1 中选取参数代入A 矩阵,可写出每两个相邻关节之间的变换矩阵。为简化书写,下面矩阵中用符号Cθ 表示cosθ,Sθ 表示sinθ。
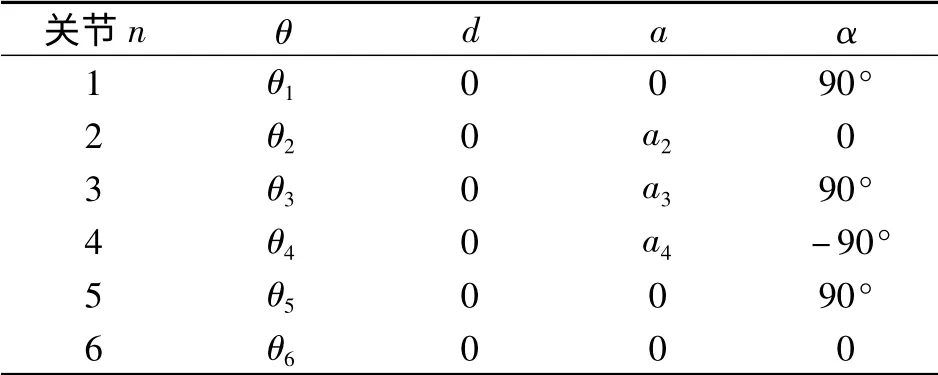
表1 机器人D-H 参数
在机器人的基座和第6 轴末端之间的总变换为:

2.2 CCD 相机坐标系与机器人坐标系间的转换关系
在上一节中得出机器人本身包括基坐标系和工具坐标系之间的转换关系,而CCD 相机和激光器搭载在机器人末端,所以这里主要讨论CCD 相机坐标系与机器人第6 关节末端坐标之间的转换关系。机器人的坐标系和CCD 相机的坐标系如图2 所示。
在系统中设定一个定点X,假设它在全局坐标系下的坐标表示为Xb=(xbybzb)T,而其在3D 相机坐标系的坐标设定为Xa=(xayaza)T,则Xa与Xb之间的关系满足:

式(2)中:T0为机器人末端工具坐标系相对于世界坐标系的平移矩阵;R0为机器人末端工具坐标系相对于世界坐标系的旋转矩阵;Tt与Rt则分别为3D 相机坐标系相对于机器人末端工具坐标系的平移矩阵和旋转矩阵。
将式展开后,可得:

得出CCD 相机坐标系与机器人末端坐标系的转换关系后,由于3D 激光扫描系统固定安装于机器人第6 轴末端,因此其转换矩阵中的参数固定,所以通过相关标定试验可以将其中的参数求解出来,也为后续的数据转换和传输试验提供了良好的理论依据[6]。
3 机器人扫描轨迹规划
一般而言,对大尺寸的工件,或者移动不方便的工件,应采用旋转测头的方式;对中小尺寸的零件,则可以采用旋转工件的方式。该系统测量的是两结构件装配时的距离,待测量工件是不允许随意移动的,因此该系统采用的是旋转测量装置的扫描方式。
机器人末端夹持CCD 相机和激光器构成的视觉扫描系统是线激光扫描,所以在扫描的过程中,扫描系统应沿着切割线方向的每一点依次扫描,这样整个曲面的扫描才能完成,因此需要对机器人末端夹持的视觉扫描系统的扫描路径进行规划。不管是360°面形测量,还是三维视觉环境扫描,都有一个共同的特点,那就是旋转工作台的旋转轴与摄像机光轴垂直、与光平面平行[7]。旋转体360°面形测量系统框图见图4。
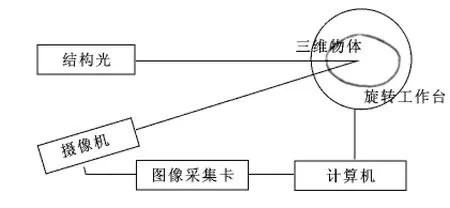
图4 旋转体360°面形测量系统框图
相机需要垂直于待扫描结构件的关键点所在的切平面,也就是扫描点所在平面的法线方向,而且标定实验证明:相机在距离扫描面15 ~20 cm 的距离时成像效果最好,使其满足上述条件[8]。
4 计算实例
待测结构件如图5 所示,其平面尺寸图如图6 所示。
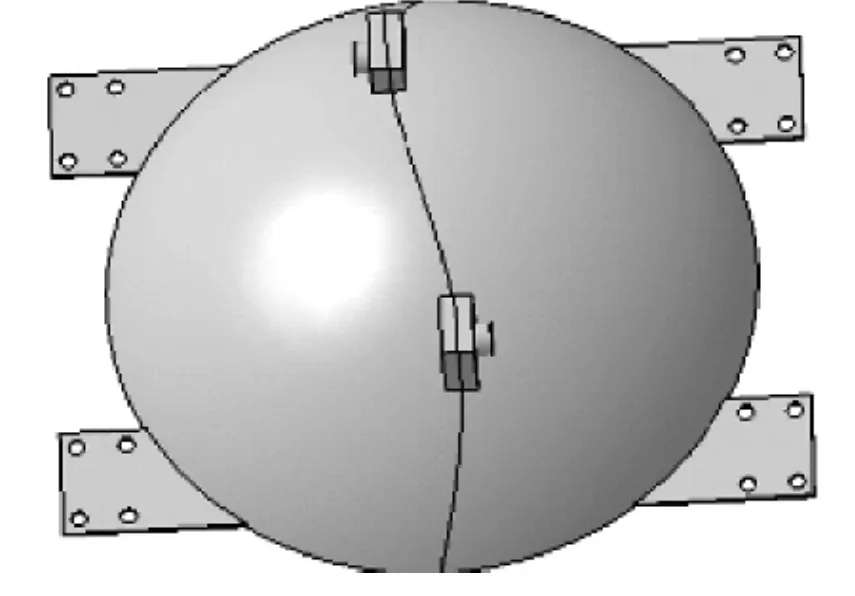
图5 待测结构件

图6 结构件平面尺寸图
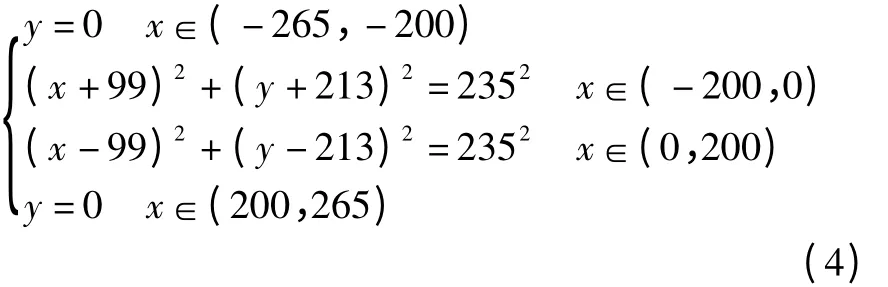
球壳中部曲线为装配线,通过几何计算,容易得出它的曲线方程为:
设定相机末端距离扫描点15 cm,相当于球的半径增加了,相应地切割线的平面投影方程也有了变化,投影曲线的x 坐标和y 坐标都增加了相同的比例,比例系数为k =415/265,即新坐标x' =415/265·x,y' =415/265·y。因此,转化后的三维坐标下的装配线的曲线方程为:
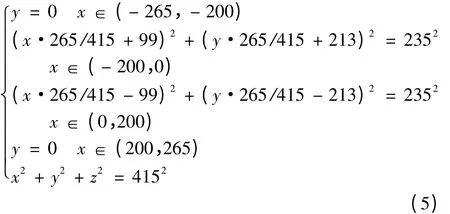
由此,可以得出相机末端运动坐标方程为:
当x∈(-265,-200)时,相机末端坐标为:

当x∈(-200,0)时,相机末端坐标为:

当x∈(0,200)时,相机末端坐标为:

当x∈(200,265)时,相机末端坐标为:

5 结论
主要完成了基于结构光技术的3D 激光扫描测量系统的原理建模和轨迹规划,得出了机器人运动学方程和CCD 相机末端坐标系转换方程,并通过实例得出相机末端运动坐标方程。最后,通过对结构光测量技术的深入研究以及实际应用,制定了采用可移动的6 轴工业机器人夹持激光器与CCD 相机的方式进行零件的扫描,避免了扫描盲区的产生,为进一步的实际装配测量实验和实时分析提供了良好的基础。
【1】史玉升,李中伟,钟凯,等.结构光三维测量技术在模具设计与制造过程中的应用[J]. 航空制造技术,2009(20):48 -50.
【2】张倩索.基于三坐标的大型物体形貌检测研究[D].吉林:长春理工大学,2011.
【3】刘先卓,王树奎,陈锦生. 激光测量技术及其应用[J].机械设计与制造,2003(3):95 -96.
【4】ALLEN P K,TIMCENKO A,OSHIMI B,et cl. Automated Tracking and Grasping of a Moving Object with a Robotic Hand-eye System[C]//IEEE Trans Robot Automat,1993:152 -165.
【5】苗新刚.基于多Agent 的复杂结构件装配监测一体化系统研究[D].北京:北京航空航天大学,2011.
【6】MA S D. A Self-calibration Technique for Active Vision System[J]. IEEE Trans on Robot Automation,1996,12(1):114 -120.
【7】翟新涛.基于双目线结构光的大型工件测量[D].哈尔滨:哈尔滨工程大学自动化学院,2008:1 -73.
【8】汪苏,郭倩,沈忠睿,等. 基于结构光技术的3D 激光扫描测量系统研究[J].机械,2012.
猜你喜欢
中学生数理化·高一版(2020年1期)2020-02-20
经济技术协作信息(2018年8期)2019-01-14
中学生数理化·八年级物理人教版(2018年10期)2018-12-06
中学生数理化·七年级数学人教版(2018年4期)2018-06-28
纤维复合材料(2018年4期)2018-04-28
数学大世界(2018年1期)2018-04-12
制造技术与机床(2017年6期)2018-01-19
制造技术与机床(2017年3期)2017-06-23
中等数学(2017年2期)2017-06-01
科普童话·百科探秘(2015年4期)2015-05-14