
卫星轨道与钟差对精密单点定位精度的影响
2013-12-11 07:28徐爱功徐宗秋
测绘通报 2013年5期
徐爱功,徐宗秋,隋 心,2
(1.辽宁工程技术大学测绘与地理科学学院,辽宁阜新123000;2.武汉大学卫星导航定位技术研究中心,湖北武汉430079)
一、引 言
精密单点定位利用IGS提供的精密卫星轨道和钟差处理单台GPS接收机的非差伪距和载波相位观测值,估计测站三维坐标、接收机钟差、电离层和对流层改正信息等参数,在全球范围内可实现高精度的定位与测时,广泛应用于测绘、航空、海洋和气象等诸多领域[1-2]。随着定位算法和各种误差改正模型的不断改善和精化,精密单点定位的参数估计精度和可靠性很大程度上取决于IGS产品的可靠性和精度[3]。因此,IGS数据处理中心亦致力于不断提高产品的质量,目前IGS发布的卫星轨道与钟差产品的精度、时延和采样率见表1。从表1中可知,IGS产品主要分为超快产品(包括外推部分和实测部分)、快速产品和最终产品,其中轨道产品精度均达到了厘米级,而钟差产品的差异较大,快速产品和最终产品的精度一致,卫星钟差最终产品的采样率更高。为了分析IGS不同产品对精密单点定位精度的影响,选取不同的卫星轨道与钟差产品组合,分不同时长进行静态精密单点定位试验。
二、数据处理方法
在GPS精密单点定位中,观测时刻的卫星轨道和钟差均需通过内插得到。由于卫星轨道变化平缓,一般采用多项式插值方法即可内插出观测瞬间卫星的精确位置,而卫星钟差存在短周期或不规则变化,其变化具有随机性,常采用切比雪夫多项式法和拉格朗日多项式内插法[4],将5 min或更高采样率的产品加密到用户所需的采样间隔[5-6]。已知卫星的轨道和钟差,观测方程中仅有测站三维坐标、接收机钟差、对流层延迟和模糊度等参数,但定位中还必须顾及相对论效应改正、地球自转改正、卫星天线相位中心偏差改正、地球固体潮改正、海洋负荷潮改正、引力延迟改正和接收机天线相位中心改正等[7]。
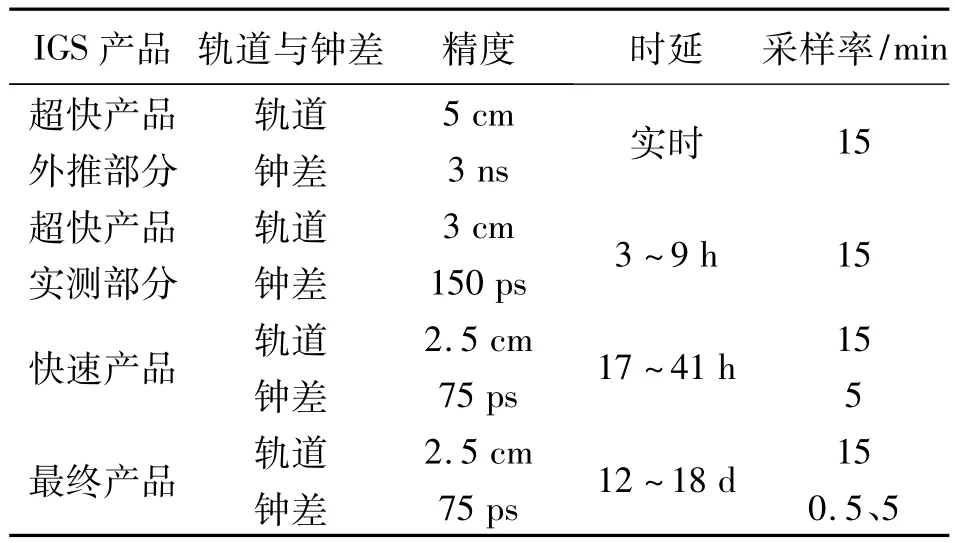
表1 IGS卫星轨道与钟差产品
利用武汉大学卫星导航定位技术研究中心研发的PANDA软件进行精密单点定位数据处理。PANDA软件采用非差处理模式,从读取GPS标准数据格式RINEX开始,进入数据预处理模块,尽可能地发现和修复周跳,并剔除异常观测值,输出干净数据,进入参数估计模块。对未修复的周跳引入新的模糊度参数,对未完全探测出的小周跳与粗差,在残差编辑模块的质量控制中进行处理。软件考虑尽可能多的改正项,未能精确模型化的误差因素通过参数估计吸收,最后是产品输出[8-9]。
三、试验与分析
试验处理了8个IGS站2011年第114天至119天的数据,观测站名及其分布如图1所示。观测数据及卫星星历和钟差产品从ftp:∥cddis.gsfc.nasa.gov网站下载。为了分析不同卫星星历及钟差对精密单点定位精度的影响,采用6种不同的产品组合进行试验,分别为最终星历与最终钟差(Forbit_Fclk)、快速星历与最终钟差(Rorbit_Fclk)、超快星历实测部分与最终钟差(Uorbitobs_Fclk)、超快星历外推部分与最终钟差(Uorbitpre_Fclk)、最终星历与快速钟差(Forbit_Rclk)和快速星历与快速钟差(Rorbit_Rclk),并且分不同时长进行静态精密单点定位解算,计算时长分别为1 h、2 h、4 h、6 h、12 h 和24 h。将每天每种时长的定位结果分别与IGS发布的周解(视为真值)做差,得到X方向、Y方向和Z方向的定位误差,对6天的定位结果在3个方向上分别求RMS值,并对3个方向的RMS值求平均值,分析不同IGS产品的定位精度。

图1 IGS站名及其分布
其中,NAIN和SUTM测站的定位结果分别如图2所示,其他测站定位结果类似。
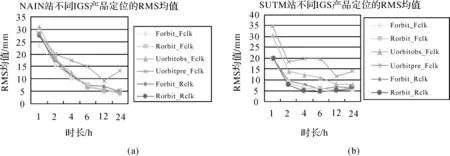
图2 NAIN站和SUTM站定位结果
从图2可以看出,最终轨道与快速轨道的定位精度一致,超快轨道的实测部分与最终轨道的定位精度接近,超快轨道的外推部分定位精度明显偏低,最终钟差与快速钟差的定位精度一致。除超快轨道的外推部分外,其他轨道产品的定位精度随计算时长的增加而提高,且在4 h之前精度提高较快,之后定位精度达到毫米级左右,提高缓慢或不再提高,定位结果趋于稳定。超快轨道外推部分的定位精度总趋势是随计算时长的增加而提高,但两测站12 h的定位精度明显高于24 h的定位精度,其原因有待研究。
表2为NAIN和SUTM测站定位结果的RMS值统计,因为快速轨道和最终钟差及最终轨道和快速钟差与快速轨道和快速钟差的定位结果类似,所以不一一列出。从表2可以看出,NAIN站最终轨道和最终钟差1 h定位的RMS值在X、Y和Z方向上,分别为33.2 mm、23.6 mm 和 13.0 mm,3 个方向上的均值为23.3 mm;6 h定位的RMS值在X、Y和Z方向上,分别为4.9 mm、8.8 mm 和 8.3 mm,3 个方向上的均值为7.4 mm,精度提高了3.1倍。SUTM站最终轨道和最终钟差1 h定位的RMS值在X、Y和Z方向上,分别为27.2 mm、16.6 mm 和12.4 mm,3 个方向上的均值为18.7 mm;6 h定位的RMS值在X、Y 和 Z 方向上,分别为6.0 mm、3.5 mm、和 4.0 mm,3个方向上的均值为4.5 mm,精度提高了4.2倍。两测站快速轨道和快速钟差与最终轨道和最终钟差的定位精度一致,1 h定位精度在2 cm左右,6 h定位精度提高了3倍以上,达到了毫米级。NAIN站超快轨道实测部分1 h定位的RMS值在X、Y和Z方向上,分别为26.6 mm、38.6 mm 和28.5 mm,3 个方向上的均值为31.2 mm;6 h定位的RMS值在X、Y 和 Z 方向上,分别为5.3 mm、6.0 mm 和9.4 mm,3个方向上的均值为6.9 mm,精度提高了4.5倍。SUTM站超快轨道实测部分1 h定位的RMS值在X、Y 和 Z 方向上,分别为41.9 mm、25.9 mm 和24.1 mm,3个方向上的均值为30.6 mm;6 h定位的RMS值在 X、Y和 Z方向上,分别为14.3 mm、10.5 mm、和8.4 mm,3 个方向上的均值为11.0 mm,精度提高了2.8倍。超快轨道实测部分与最终轨道的定位精度十分接近,1 h定位精度在3 cm左右,2 h定位精度为1 cm左右,6 h后精度可达毫米级。NAIN站超快轨道外推部分1 h定位的RMS值在X、Y和 Z 方向上,分别为28.5 mm、23.0 mm 和32.8 mm,3个方向上的均值为28.1 mm;24 h定位的RMS值在 X、Y和 Z方向上,分别为13.6 mm、12.2 mm和14.1 mm,3 个方向上的均值为13.3 mm,精度提高了2.1倍。SUTM站超快轨道外推部分1 h定位的 RMS值在 X、Y和 Z方向上,分别为36.9 mm、28.5 mm 和 39.3 mm,3 个方向上的均值为34.9 mm;24 h定位的RMS值在X、Y和 Z方向上,分别为11.0 mm、19.2 mm、和12.0 mm,3 个方向上的均值为14.1 mm,精度提高了2.5倍。超快轨道外推部分1 h定位精度在3 cm左右,但24 h的定位精仍在1 cm左右。
为进一步比较不同IGS产品定位的差异,以最终轨道和最终钟差定位的RMS均值为基准,其他产品定位的RMS均值与之相减,结果如图3所示。
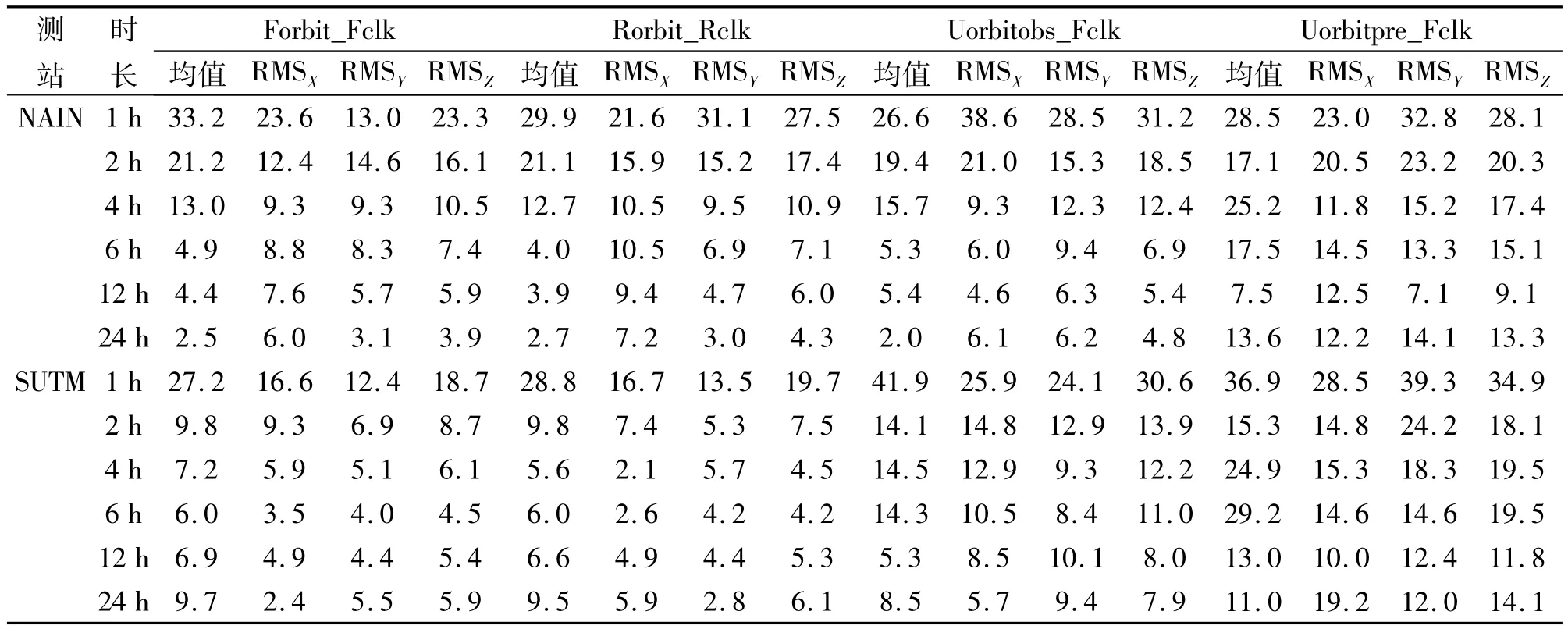
表2 不同IGS产品定位的RMS值 mm
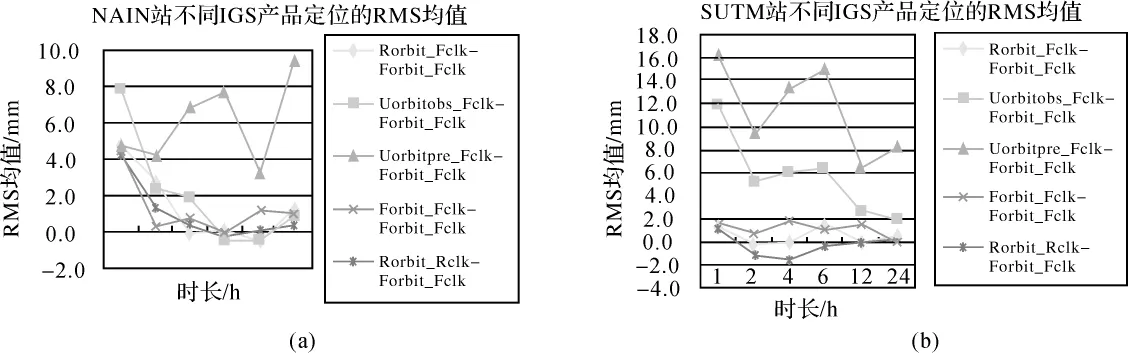
图3 NAIN站和SUTM站不同IGS产品定位的RMS均值差值
从图3可以看出,NAIN站快速产品与最终产品1 h的定位差异为4 mm左右,2 h后差异逐渐小于2 mm;超快轨道的实测部分与最终轨道1 h的定位差异为8 mm,2 h后差异逐渐小于2 mm;超快轨道的外推部分与最终轨道的差异始终较大,24 h的定位差异最大,但不超过10 mm。SUTM站快速产品与最终产品的定位差异始终小于2 mm;超快轨道实测部分与最终轨道1 h的定位差异为12 mm,2 h后差异在5 mm左右;超快轨道外推部分与最终轨道定位差异较大,最大值为16 mm。对NAIN站与SUTM站不同轨道与钟差产品定位的RMS均值差值进行统计,快速产品与最终产品的平均定位差异为1.1 mm,超快轨道实测部分与最终轨道的平均定位差异为4.0 mm,超快轨道外推部分与最终轨道的平均定位差异为8.7 mm。
四、结 论
GPS精密单点定位在全球范围内可实现毫米级到厘米级的静态定位和厘米级到分米级的动态定位,直接得到ITRF框架坐标,单机即可作业,灵活机动,不受距离限制,应用前景日趋广泛。卫星轨道与钟差产品的质量是实现高精度精密单点定位的决定性因素,因此,本文分析了目前不同轨道与钟差产品对精密单点定位精度的影响。
结果表明,IGS发布的快速轨道和钟差与最终轨道和钟差的定位精度是一致的,1 h定位精度在2 cm左右,6 h后定位精度均达到了毫米级,定位精度随观测时间的增长而提高,平均定位差异为1.1 mm。超快轨道实测部分与最终轨道的定位精度十分接近,1 h定位精度在3 cm左右,2 h定位精度为1 cm左右,6 h定位精度可达毫米级,平均定位差异为4.0 mm。超快轨道外推部分与最终轨道的定位精度差异明显,1 h定位精度在3 cm左右,2 h后定位精度均在1 cm左右,平均定位差异为8.7 mm。
[1]LEANDRORF,SANTOSM C,LANGLEY R B.Analyzing GNSS Data in Precise Point Positioning Software[J].GPSSolutions,2011,15(1):1-13.
[2]李鹏,熊永良,黄育龙,等.GPS星历精度对精密单点定位的影响[J].测绘科学,2009,34(2):15-17.
[3]李征航,张小红.卫星导航定位新技术及高精度数据处理方法[M].武汉:武汉大学出版社,2009:23-24.
[4]杨学锋,程鹏飞,方爱平,等.利用切比雪夫多项式拟合卫星轨道坐标的研究[J].测绘通报,2008(12):1-3.
[5]陈克杰,方荣新,李敏,等.PANDA软件在高频数据PPP动态定位中的应用研究[J].大地测量与地球动力学,2011,31(4):132-135.
[6]刘冬,张清华.基于高斯过程的精密卫星钟差加密[J].测绘学报,2011,40(Sl):59-62.
[7]叶世榕.GPS非差相位精密单点定位理论与实现[D].武汉:武汉大学,2002.
[8]LIU Jingnan,GE Maorong.PANDA Software and Its Preliminary Result of Positioning and Orbit Determination[J].Wuhan University Journal of Natural Sciences,2003,8(2):603-609.
[9]耿涛,赵齐乐,刘经南等.基于PANDA软件的实时精密单点定位研究[J].武汉大学学报:信息科学版,2007,32(4):312-315.
猜你喜欢
导航定位学报(2022年5期)2022-10-13
中国惯性技术学报(2020年2期)2020-07-24
山东冶金(2019年5期)2019-11-16
智富时代(2019年4期)2019-06-01
智富时代(2019年4期)2019-06-01
测控技术(2018年4期)2018-11-25
导航定位学报(2018年3期)2018-09-03
雷达学报(2017年1期)2017-05-17
载人航天(2016年4期)2016-12-01
山东工业技术(2016年15期)2016-12-01
