
基于LPC2132的双驱电动车控制系统设计
2013-12-10 14:07宁波职业技术学院电子信息工程系陈光绒
电子世界 2013年6期
宁波职业技术学院电子信息工程系 陈光绒
1.概述
当今石油资源匮乏与环境保护的紧迫需求,对汽车工业的发展提出了新的要求,那就是:低噪声、零排放和节能等,电动汽车正是当今汽车工业籍以解决能源、环保等问题可持续发展的最重要途径,而以轮毂电机为驱动的电动车既可以消除传统传动中的机械磨损与损耗,提高了传动效率,又具有体积小和重量轻的优点,使得提高效率的同时,车轮空间也能得到有效利用,更有利于实现机电一体化和现代控制技术;ARM7系列微处理器,作为32位嵌入式处理器,以其极高性能、低功耗、丰富的片上资源、小体积等特性,已经被广泛应用于移动电话、手持式计算机、汽车等各领域,成为极具市场竞争和前景的处理器[1]。本设计方案基于PHILIPS公司的ARM7TDMI-STM处理器LPC2132,分别控制两个无刷直流电机,实现电动汽车两后轮独立驱动,对控制系统进行了可靠设计,保证系统的稳定性,并最终在实践中进行了验证。
2.无刷直流电机及驱动控制
无刷直流电动机是由转子位置传感器、电动机本体以及电子开关电路组成。其工作原理如下:由位置传感器(霍尔传感器)定时动态检测转子所处的位置,并根据此位置信号来控制开关管的导通或截止,从而控制定子绕组通电与断电,即实现了电子换向功能,并使电机连续运转。
图1是三相联结全桥驱动电路,其中,开关管Q1、Q3、Q5采用P沟道MOSFET功率管,栅极为低电平时MOSFET管导通,VD1、VD3、VD5为相应的保护二极管;开关管Q2、Q4、Q6采用N沟道MOSFET功率管,栅极为高电平时MOSFET管导通,VD2、VD4、VD6为相应的保护二极管。其中位置传感器的3个输出端通过特定的逻辑电路控制Q1-Q6开关管工作(导通或截至),其控制方式有两种:“三三导通方式[2]”与“二二导通方式”。全桥式
驱动下的绕组又分为星形联结和角形联结,其联结方式如图2所示。
三三导通方式”指的是每次使3个开关管同时导通,在图1中,各开关管的导通顺序为:Q1、Q2、Q3--﹥Q2、Q3、Q4--﹥Q3、Q4、Q5--﹥Q4、Q5、Q6--﹥Q5、Q6、Q1--﹥Q6、Q1、Q2。“三三导通方式”在实际工作时又可以分为六种控制方式,每隔60°改变一次导通状态,每改变一次状态更换一个开关管,每个开关管导通180°。在每种状态下,其合成转矩的大小都是单相转矩的1.5倍[3]。
在本文中使用三相全桥星形联结,采用“三三导通方式”,驱动电路中MOSFET管的导通或截止由相应的软件来控制,即根据位置传感器的检测信号来提取相应的MOSFET管对应的控制字,并通过特定的逻辑电路控制MOSFET管,实现对MOSFET管导通或截止控制,
从而实现对无刷直流电机作出换相控制,使电机能连续运行。[4]电机方向的控制只是上述功率MOSFET管的导通顺序不同,也就是所提取的控制字不同。无刷直流电机的转速控制,可以采用PWM(脉宽调制)方法来控制电机的通电电流,在此不做详细描述。
3.双驱电动车控制系统硬件设计
本论文控制系统设计思想是利用一个CPU控制两个无刷直流电动机,是为实现电动汽车的后轮分别独立驱动而设计的。在电动汽车控制系统中,控制系统主要负责对两个无刷直流电机的电机速度调节、正反转控制,开始和停止控制等功能。这里采用PHILIPS公司LPC2100系列中的LPC2132[5]作为中央处理器。LPC2132是基于一个支持实时仿真和跟踪的32位ARM7TDMI-STMCPU的微控制器,内嵌高速64K字节Flash存储器,其宽范围的串行通信接口和丰富的片内资源(如32位定时器x4个、PWM通道x6个、10位8路ADC和10位DAC,另外具有47个通用I/O口以及9个边沿或电平触发的外部中断源)使其具有强大的处理功能,并具有很强的抗干扰能力,特别适用于工业控制。电动车智能控制系统总体框图如图3所示,下面给出几部分功能的硬件设计图。
3.1 电源设计
本控制系统的电源由4块12V大容量铅蓄电池串连后提供48V直流电,而系统中的工作电压还有+3.3V、+5V和+15V,因此采用常用的稳压电源芯片LM7824、LM7815、1117-3.3和1117-5产生所需各组电压,具有可靠、稳定、简单的特点。如图4所示。
3.2 全桥驱动电路的逻辑控制电路
换相控制逻辑包括根据当前转子的位置控制电桥上下桥臂,正确给出绕组通电;通过对绕组通电的时间比例控制速度;对电桥实施死区保护,防止烧毁MOSFET和驱动电路。所以设计的逻辑控制电路具有以下特点:采用逻辑门电路与RC延时电路,避免了控制时出现死区;另外增加了电机绕组续流功能,保护了控制管。两个电机的电桥逻辑控制电路一样,这里给出了其中一路,如图5所示。
3.3 霍尔位置传感器接口电路
无刷电机内置的三个位置传感器(霍尔)采用5V电源供电,由于电机内部电磁场的作用以及工作时的干扰,对霍尔位置传感器及其电路的电源要求非常高,[6]这里我们采用独立电源供电,此外对传感器脉冲检测电路进行了滤波处理(同时在软件中也做了相应的处理),以提高抗干扰能力,这里图6霍尔位置传感器接口电路仅画出其中一路,具体电路如图6所示。
3.4 电桥驱动电路设计
如图7所示,全桥驱动电路的每一相都由上、下臂组成,这里给出了其中一相的电原理图。
其中上桥的控制信号高电平有效,下桥的低控制信号电平有效。针对MOSFET的D-S导通时存在导通电阻Ron,同时考虑电机工作电流较大,这里采用专用驱动芯片IR2103[7],可以解决死区保护等各种问题。
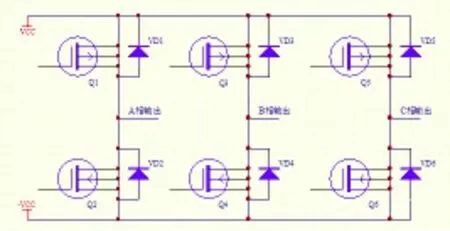
图1 三相联结全桥驱动电路

图2 三相星形和角形联结

图3 电动车智能控制系统总体框图

图4 系统电源电路
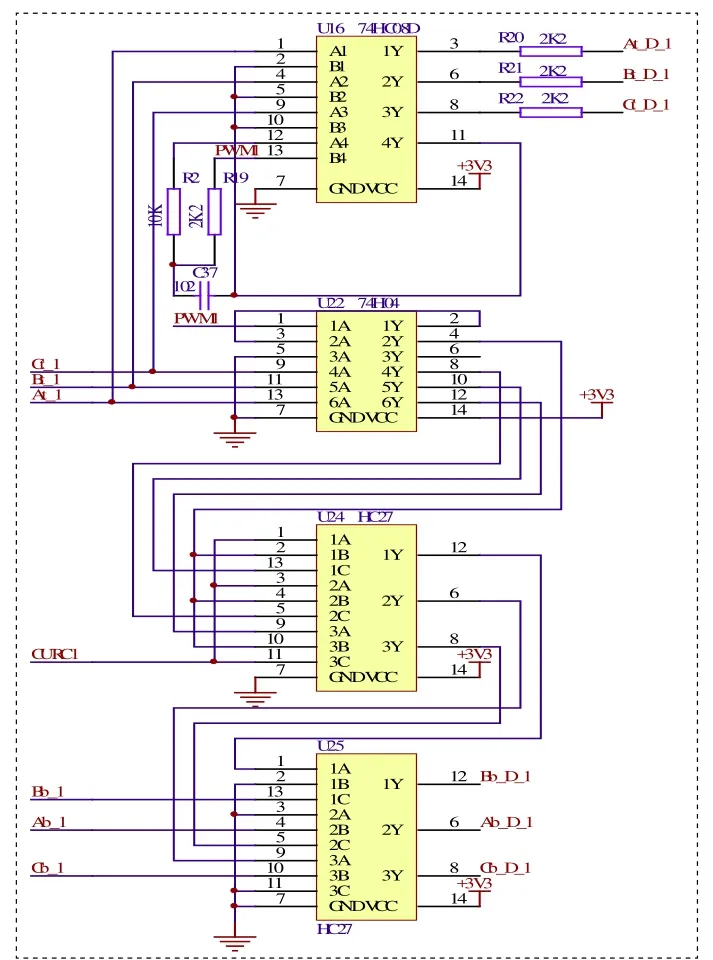
图5 全桥驱动的逻辑电路控制电路
限于篇幅,其它接口包括串口通信、模拟采集、油门电路输入、转弯电压输入、过流采样、电池电压采样等原理图没有一一列出。
4.控制软件设计
为了实现对电动汽车的智能控制,本系统中软件包含以下功能模块:两个无刷直流电机位置检测模块、电机换相逻辑控制模块、速度调节模块(转速采样、PWM正转和反转、PID控制等)、安全管理模块、电子差速转弯模块、串口通信模块等功能。系统软件编程采用模块化结构,以增加调试的灵活性、修改的方便性、移植的通用性。软件包括主程序、中断程序和相应的功能子程序[8]。主程序流程图如图8所示,主程序主要完成对控制寄存器、数据信息单元的初始化以及对各模块的响应。程序启动后首先是进行初始化,然后对电机状态检测并进入启动模块以及速度管理模块,在出现异常时进入安全管理模块,并通过串口向外部发送车辆状态信息。下面简单介绍下几个主要模块。

图6 霍尔位置传感器接口电路
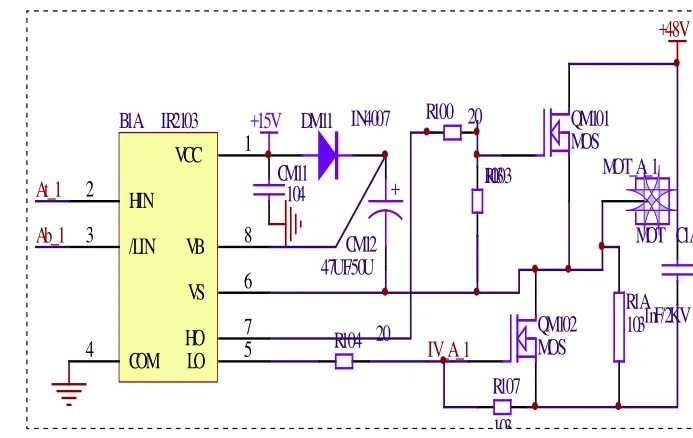
图7 全桥驱动电路
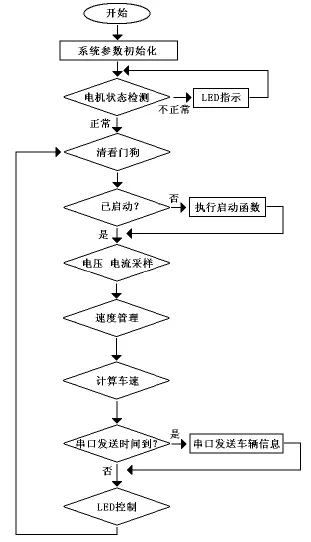
图8 系统主程序流程图
4.1 系统初始化
本系统采用11.0592MHz(Fosc)晶体振荡器,处理器工作频率为4倍主频即44.2368MHz;TIMER0的0通道中断实现霍尔位置信号查询以及软件定时,设置为IRQ中断,分配为最高中断优先级,以确保电机换相最快响应;AD转换器频率设置在1MHz,由软件定时启动转换,并采用查询标志位(AD完成标志位)方式确定转换结束并读取转换数据;在PWM通道0产生0.1ms(相当于10KHz)的PWM波,通道2和4在此基础上产生占空比可调的波分别控制两个电机转速;串口以57600的波特率定时向外发送电机相关信息,1个起始位,8位数据,无奇偶校验位,1个停止位。
4.2 模拟量采集
油门采样电压、驱动电机过流采样电压、转弯角度传感器采样电压和电池欠压采样电压通过模拟开关4051(8通道选1)切换后输入片内AD转换器(AD0.7通道),其中通道选择控制信号由CPU的P1.2~P1.0实现。由于采样电阻上的电压比较小,因此在采样输出端和模拟开关间加一级放大电路,对采样电压进行适当放大,并用跟随器隔离,保证系统灵敏、可靠、安全。
4.3 PID控制
PID控制算法比较普遍,这里直接给出离散PID表达式[9]:

其中:i为采样序号;ui为第i次采样时刻的输出值;ei为第i次采样时刻输入的偏差值;e为第i-1次采样时刻输入的偏差值;Kp为比例系数;KI为积分系数;KD为微分系数;u0为PID控制的原始初值。
由(1)可得到第i-1个时刻的输出值,与(1)相减后得输出值增量:

确定了上述三项的系数,就可以根据前后三次测量值的偏差,计算出控制增量,用此增量去控制PWM波的占空比,实现对电机转速控制与调整。
(4)电子差速
由Ackermann-Jeantand[3]模型得到:

其中δ为电动车前轮角度;Rin、Rout为两后内外轮的转弯半径;B、L分别为车体宽度和长度。在计算中只需计算出转弯时内侧轮目标速度,外侧轮目标速度由式(3)得到,实现电子差速。
5.实验及结论
本文基于LPC2132设计了电动汽车后两轮独立驱动控制系统,通过调节两组PWM占空比值,实现对两个轮毂电机的同时调速。通过智能控制系统软硬件设计,实现前进、转向、后退、自动巡航、转向灯指示、电子差速等功能。实验结果表明整车控制效果良好,已经达到实用指标。
[1]Ackermann J,Odenthal D.Advantages of active steering for vehicle dynamics control[C].Vienna:32ndInternational Symposium on Automotive Technology and Automation,1999.
[2]Wu Chun-hua,Chen Guo-cheng,Sun Cheng-bo.A wide-angle wave control method of reducing torque ripple for brushless DC motor[J].Journal of Shanghai University(English Edition),2007,11(3):300-302.
[3]王晓明.电动车的单片机控制[M].北京:北京航空航天大学出版社,2002.
[4]左小五.LPC2132在嵌入式系统中的应用技术[J].微计算机信息,2007,23(1-2):183-185.
[5]周立功等.ARM微控制器基础与实战[M].北京:北京航空航天大学出版社,2003.
[6]齐利民,刘国海,贾洪平.电动车用无刷直流电机无位置传感器控制[J].微电机,2011,44(11):57-59.
[7]陆云波,鱼振民,胡文华等.基于控制专用单片机的无刷直流电机控制器[J].微电机,2002,35(1):26-28.
[8]李军,李振杰,郭博.基于ARM7及nRF905的智能小车系统设计[J].阜阳师范学院学报(自然科学版),2012,29(2):73-76.
[9]刘金琨.先进PID控制MATLAB仿真[M].北京:电子工业出版社,2004.
猜你喜欢
大电机技术(2022年5期)2022-11-17
莆田学院学报(2021年5期)2021-11-13
甘肃科技(2020年20期)2020-04-13
电子制作(2017年1期)2017-05-17
电子制作(2016年1期)2016-11-07
电测与仪表(2016年1期)2016-04-12
电测与仪表(2016年4期)2016-04-11
铁道科学与工程学报(2015年4期)2015-12-24
电测与仪表(2015年23期)2015-04-15
电机与控制应用(2015年10期)2015-03-01
