一维相控阵二次航管设备标校新方法
2013-12-10 14:07:10中国西南电子技术研究所
电子世界 2013年4期
中国西南电子技术研究所 王 谊
1.引言
二次航管设备是车载警戒系统中重要的设备,其录取的飞机方位、距离、高度和呼号,与一次雷达的航迹数据匹配,可以形成完整的空域态势,可以让管制员精确掌握飞机的水平和垂直距离,准确的调配飞机飞行时间间隔。车载警戒系统在交付用户前,要对警戒探测系统的所有雷达的零位一致性进行标校和验证,以消除或减少系统误差。然而,至今车载雷达的标校工作还是比较困难的工作,在静态标校中,传统做法是利用标校塔进行标校。受到天气条件以及标校塔少,特别是二次航管设备标校时,在标校塔上安装二次航管应答机比较困难,标校距离较短,以及多径影响等的限制。
针对现有车载雷达标校方法中存在的上述诸多不便和缺点,基于民航飞机绝大部分都已经安装了ADS-B设备,本文提出并设计实现了一种基于ADS-B定位数据的雷达标校和检验新方法。通过数据分析处理,得到二次航管设备方位和距离数据与ADS-B的数据的偏差,通过设定应答信号延时实现可变距离标校;设定零位偏差,实现与其他警戒探测系统的零位一致性。此方法可以实现全方位角度的标校,能够有效地满足车载警戒系统标校需求,特别适合相控阵雷达的标校。
2.原理
2.1 定义
广播式自动相关监视系统ADS-B(Automatic Dependent SurveillanceBroadcast)是一种基于全球卫星定位系统和利用地空、空空数据链通信完成信息传递和交通监视的空管监视新技术,即航空器通过广播模式数据链,自动发送由机载导航设备和定位系统生成的数据包,包括航空器识别、位置(高度、经度、纬度)、速度及意向信息等。地面和其他航空器可以接收此数据包,并用于各种用途。但目前ADS-B在雷达标校中的应用还是很少,本文利用在车上安装高精度差分GPS同步获得本地雷达的定位数据和利用ADS-B接收设备获取目标飞机的定位数据,解算目标真值,与二次航管设备采集的航迹数据按时间和空间位置进行匹配和插值,从而到达标校和检验的目的。
2.2 标校原理
基于ADS-B数据的雷达标校方法实质是一种GPS标校方法,但是又具有其自身的特点,最突出之处是一般的GPS数据标校方法基于标校塔的限制,只能在几个固定的位置进行标校,通过ADS-B数据,可以进行全方位,全距离段,即全空域的标校,可以最大限度的修正系统误差,特别适合相控阵雷达的标校。
如图1所示为标校基本流程图。通过本地ADS-B接收机接收多个空中民航飞机的飞行航迹,与SSR航迹进行关联处理,得到相匹配的航迹。用匹配后的目标飞机的ADS-B定位数据和本地高精度GPS定位数据,解算出目标飞机相对本地二次航管设备的极坐标,作为二次航管设备探测目标飞机的真值。对二次航管设备录取的目标航迹和GPS目标航迹进行时空匹配和插值。最后用二次航管设备航迹数据和匹配真值数据计算系统误差和标准偏差。将多个民航飞机获得的系统误差进行融合,求取一个最优的雷达误差进行校准。
3.标校系统设计
3.1 系统组成
基于ADS-B的车载雷达标校系统包括车载二次航管设备、ADS-B接收机、高精度GPS接收机和PC机等组成。系统组成如图2所示。
3.2 标校数据采集
标校数据的采集包括本地GPS定位数据,目标飞机GPS定位数据和雷达目标探测航迹数据三方面:
1)本地GPS数据:通过车上自带高精度GPS设备接收定位数据,关键在于设定数据采集率。为方便后续与ADS-B数据进行时空对准,应尽量设定高于ADS-B数据采集率,本次测试中选用的是北京金莱威公司代理的DL-V3接收机(如图3),单点定位精度1.5米,数据率为50Hz,远高于ADS-B数据率。
2)目标飞机GPS数据:由ADS-B接收附近空域的各型飞机发送的飞机定位信息。观察显示屏上的飞机分布,比较标校范围内目标的距离和数据发送率,选择一个合适的目标飞机进行跟踪读取数据。ADS-B的数据发送率一般不稳定,发送率通常与目标飞机的航行状态有关。
3)雷达数据采集:将二次航管设为自动扇扫工作方式,并由记录仪自动录取目标航迹数据。由于二次航管设备只能录取飞机的3/A代码、高度和位置信息,ADS-B录取的是飞机的ID号,所以不能在雷达显示器上直接与ADS-B录取的空中目标相对应。由于要保证民航飞机飞行安全,在同一高度和距离上只能允许有一架民航飞机,根据这一原则,要先根据ADS-B提供的目标飞机参数,即飞行路线,高度和距离,寻找同一时间,在相同高度和距离上的二次雷达稳定跟踪的飞机。录取的飞机的3/A代码,记录下飞机的ID号,录取航迹数据,事后再作关联。

表1 ADS-B目标位置精度代码表
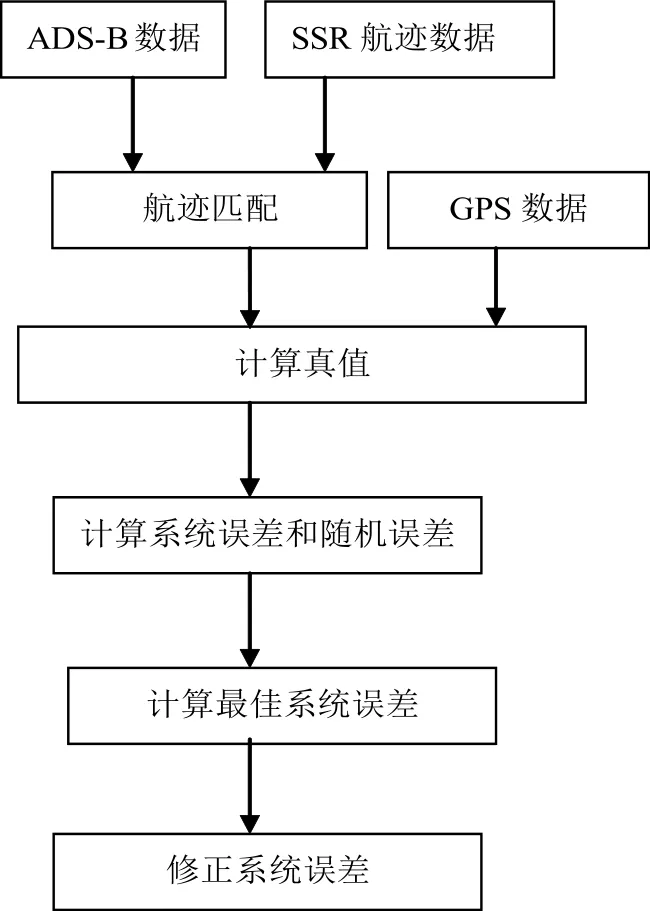
图1 标校流程图
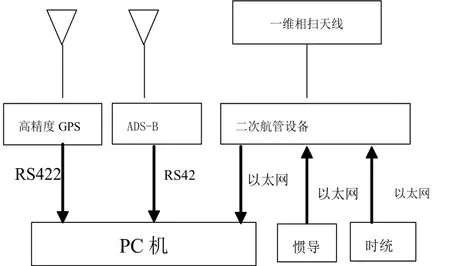
图2 标校系统组成框图

图3 DL-V3接收机
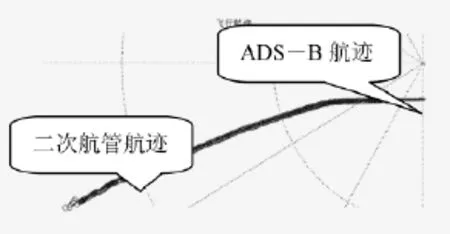
图4 4545航迹图

图5 方位一次差
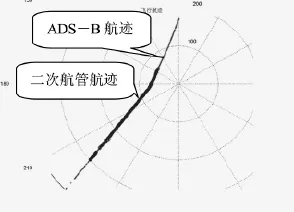
图6
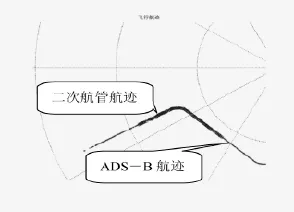
图7
4)利用仪器(如全站仪)测定相控阵天线中心相对GPS天线中心的位置关系,二者的位置在装备车上必须固定,通过计算可以得到天线中心位置的实时GPS位置信息。
5)GPS时间同步:标校系统的各组成部分之间要保持严格的时间同步。时间同步的精度直接影响标校的误差校正的准确度和最终的标校结果。要使最终的标校结果优于8m,各接收系统和雷达的时间同步精度应优于10ms。本系统采用GPS作为时间同步基准实现各设备之间的时间同步。DL-V3设备时间精度20ns,完全达到了标校系统的要求。二次航管设备通过实时接收高精度GPS设备的时间信息和秒信号,进行时间校准,时间精度可以达到10ms。
6)航向修正:惯导采用合众思壮公司生产的AT4+IMU姿态测量系统,导航精度0.008。。完全满足标校系统的要求。
3.3 数据分析与处理
2011年4月,在外场试验中,装备车处于驻车状态,对二次航管设备进行了标校。
1)二次航管设备录取民航飞机,3/A代码4545,ADSB地址码7800B9,如图4所示。
计算航迹数据与ADS-B数据的一次差如图4所示。
二次航管的航迹数据与ADS-B的数据相关,按照标准时间,计算两种数据的一次差,如图5所示。
把所有的一次差进行平均,计算出方位和距离的系统误差,在二次航管设备里把系统误差修正后,再继续进行雷达标校和检验。
2)民航飞机的3/A代码727,ADSB地址码343387。
3)民航飞机,3A代码1525,ADSB地址码,如图6所示。
4)民航飞机3/A代码1525,ADSB地址码780693如图7所示。
统计了4个架次的民航数据,在70Km-300Km的范围内,方位精度满足指标要求,在小于70Km的范围内,指标有些超差。分析其原因如下:
ADS-B的定位精度差。ADS-B数据精度的精度代码为6~8,根据协议(见表1),精度为1111.2米~185.2米,按照最高的精度185.2米计算,在距离100Km位置,误差为0.11度,在距离70Km,ADS-B的位置误差=(185.2+15)/70*1000=0.168度;在40Km的位置,误差可达0.2939度。在距离小于70Km的距离段内,ADS-B的精度误差较大,在计算精度时引入很大的误差,无法准确的定量计算方位精度。目标位置精度代码如表1所示。
4.结束语
机械扫描天线的雷达标校,利用传统的雷达标校塔标校即可获的很高精度的标校值。相扫天线在各个方位的波束宽度各不相同,测量误差随着扫描角度的增大而增大,利用标校塔标校存在局限型,充分利用二次雷达和ADS-B的数据特性,采用此方法标校,大大减少了对试验条件的要求。标校结果表明,此方法可以满足二次航管的标校要求,可以大大降低试验成本。
[1]张尉,徐炎祥.二次雷达原理[M].北京:国防工业出版社,2009.
[2]张驿,王辉,温剑,张云,何海丹.摇摆状态一维相控阵天线波束指向修正[J].电讯技术,2011,51(6).
[ 3]MH/T 4010-2006,空中交通管制二次监视雷达设备技术规范[S].
猜你喜欢
科学技术创新(2021年11期)2021-05-25 10:04:18
青年歌声(2019年12期)2019-12-17 06:32:32
科学导报·学术(2019年3期)2019-09-10 07:22:44
电子制作(2019年7期)2019-04-25 13:17:42
宇航计测技术(2018年3期)2018-09-08 02:21:32
北京航空航天大学学报(2017年7期)2017-11-24 05:27:33
电脑知识与技术(2017年1期)2017-03-24 11:37:57
电子制作(2017年23期)2017-02-02 07:16:51
北京航空航天大学学报(2016年6期)2016-11-16 01:50:52
舰船科学技术(2015年8期)2015-02-27 15:38:47