
光雷联测融合定位方法研究与应用*
2013-12-10 03:53:32宋卫红胡绍林
弹箭与制导学报 2013年1期
宋卫红,楼 琳,柴 敏,胡绍林
(1宇航动力学国家重点实验室,西安 710043;2西安卫星测控中心,西安 710043;3西安理工大学自动化与信息工程学院,西安 710047)
0 引言
光电测量系统是采用光学原理采集飞行目标信息,经处理得到所需的弹道参数和目标的特性参数,并获取飞行实况图像资料的专用测量系统,是航天测控系统中的重要组成部分,在运载火箭主动段跟踪过程中起着非常重要的作用。光电经纬仪作为一种典型的光电跟踪测量设备,具有弹道测量、飞行实况记录和物理特性参数测量等功能,在航空、航天和武器试验中有着广泛的应用[1]。
目前各发射场站附近布置的光电经纬仪,除少数设备具有激光测距功能外,大多只能提供目标的方位角和俯仰角数据,不能实现目标的单台定位功能。因此,要实现目标的定位,通常采用两台或多台设备的测量数据进行交会处理,如在目前光测处理中广泛使用的方向余弦方法[2],该方法根据光电经纬仪的布站几何同被测目标的关系确定目标位置参数,受布站影响较大;文献[3]提出了一种基于空间两异面光轴公垂线估计目标真实位置的交会方法,并分析了交会角对定位准确度的影响;随着统计估计理论的发展和完善,基于参数估计的计算方法在光测数据处理中应用越来越广泛,在文献[4]中,作者提出了多面最小二乘算法,利用经纬仪测角信息,根据经纬仪站点坐标构造以目标直角坐标为参数的多个垂直相交平面,采用最小二乘原理实现目标的空间定位;为了节省计算时间,减少计算量,文献[5]提出了递推误差自校准模型,并将其应用到光电经纬仪数据处理中,取得了很好的应用效果。
除光电经纬仪测量数据本身进行交会处理实现目标定位外,与其他不同类型设备(如脉冲雷达)测量数据进行联合定位也是一种有效的技术途径[6-7]。文中拟以光电经纬仪和雷达测量数据为研究对象,利用光电经纬仪测角数据和雷达测距数据,结合工程应用实际,提出直角坐标系下的光雷联测定位算法,推导基于该算法的定位精度模型,并对算法应用效果进行比较和分析。
1 经纬仪测距信息的解算
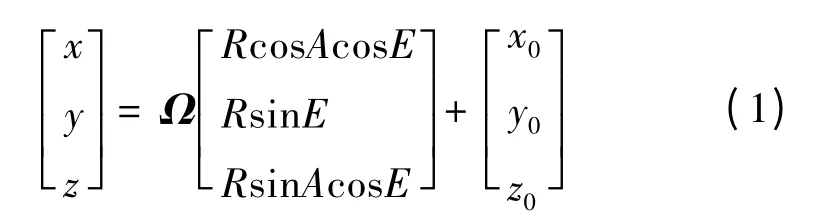
假设经纬仪在测站坐标系中的方位角、俯仰角数据分别为(A,E),雷达在测站坐标系中的测元数据为(RL,AL,EL),经纬仪和雷达在发射坐标系中的站址坐标分别为(x0,y0,z0)和(xL,yL,zL),光电经纬仪测站坐标系到发射坐标系的转换矩阵为Ω =(ωij)(i,j=1,2,3)。要求目标位置参数(x,y,z),则要先求目标到经纬仪的距离R。问题归结为,在已知参数(x0,y0,z0)、(xL,yL,zL)、A、E和RL的情况下,求出等效的经纬仪测距R,并在各已知项误差的情况下(忽略站址误差),给出各参数精度对等效距离R的综合误差影响。
在发射坐标系中,目标的位置参数(x,y,z)可由下式给出:
另有:

将式(1)、式(2)联立并整理后可得到关于R的二次方程,解方程后得:

式中:
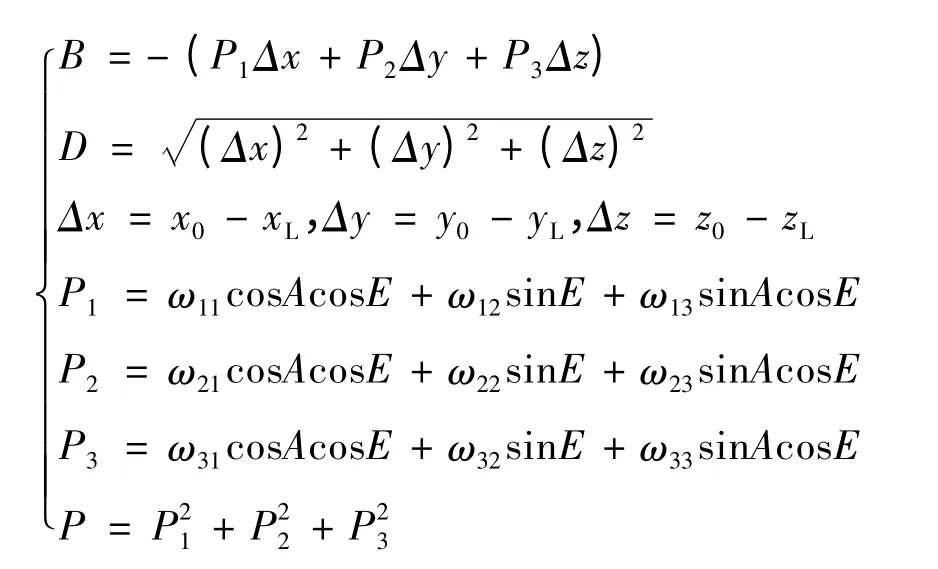
由上面的推导过程可以看出,经纬仪等效距离的确定就等价于确定二次方程式(3)解的存在性,即存在一个可行解、两个可行解及无可行解,分别对应于0<D <RL、D>RL且B2+PR2L>PD2及D >RL且B2+<PD2三种情况,这里不再赘述。需要说明的是,对于存在两个可行解的情形,等效距离R的确定需要借助雷达本身的测角数据;而对于无可行解的情形,可采用雷达原点到经纬仪射线的垂线焦点作为交汇点来确定等效距离。
2 精度分析
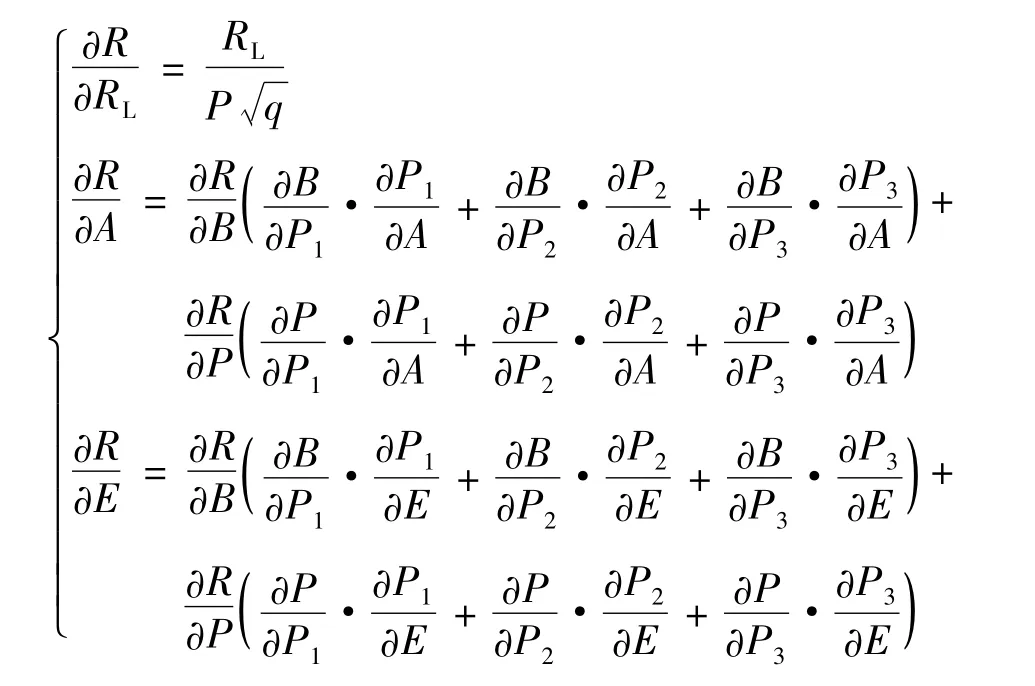
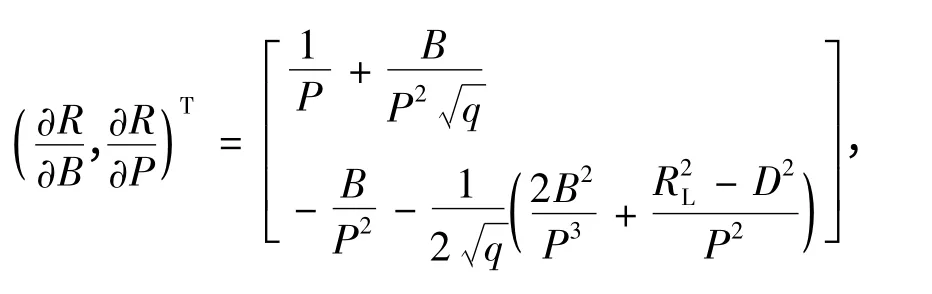
在外弹道数据处理中,各设备测量数据一般定义在测站坐标系中,而定位结果要统一到发射坐标系中。设经纬仪在测站坐标系中的测角数据为A、E,设备指标精度分别为σA、σE;雷达的测距精度为σRL,由式(3)可以看出,R 由 Δx、Δy、Δz、RL、A、E、Ω 确定,若不考虑站址误差,为求各已知项对R的影响,由误差传递公式,分别对R求关于RL、A、E的偏导数(以0<D <RL为例):
则R在经纬仪测站坐标系中的指标精度为:

求出经纬仪在经纬仪测站坐标系中的等效距离R,即可根据式(1)进行单台定位计算。再结合误差传播公式,可以计算相应的定位精度,计算公式如下:
经过转换,即可求得目标在发射坐标系中的精度。
3 数据仿真分析


图1 两种方法计算位置参数结果
以某次任务光电经纬仪和脉冲雷达75s重合弧段的测量数据为例,假设各测元数据已修正了各种误差,且扣除了相应的固定偏差。分别应用雷达单台定位算法和文中算法进行弹道及精度计算,计算效果如图1~图3所示。其中TRAM表示光雷联测定位算法,RPM为雷达单台定位算法。
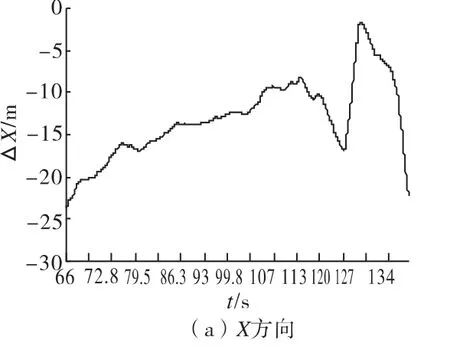
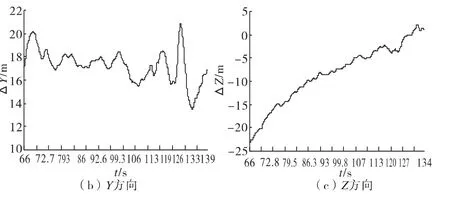
图2 两种方法计算位置参数差值
在图1中,(a)、(b)、(c)分别为光雷联测定位结果数据与雷达单台定位数据在3个方向位置分量的比对图;在图2中,(a)、(b)、(c)分别为两种方法计算得到的定位数据在3个方向位置分量的比对差值曲线。从图中可以看出,两种算法得到的定位结果基本一致,其3个方向位置分量的差值均不超过30m,且光雷联测定位算法得到的结果更加平稳,满足相应数据处理要求。
图3 中的(a)、(b)、(c)分别为光雷联测和雷达单台定位精度数据在3个方向位置分量的比对曲线图。由图可以看出,除Z方向位置精度在84.2~104.7s精度相当外,光雷联测算法得到的精度优于雷达单台定位计算的精度,且更加平稳,满足处理精度要求。

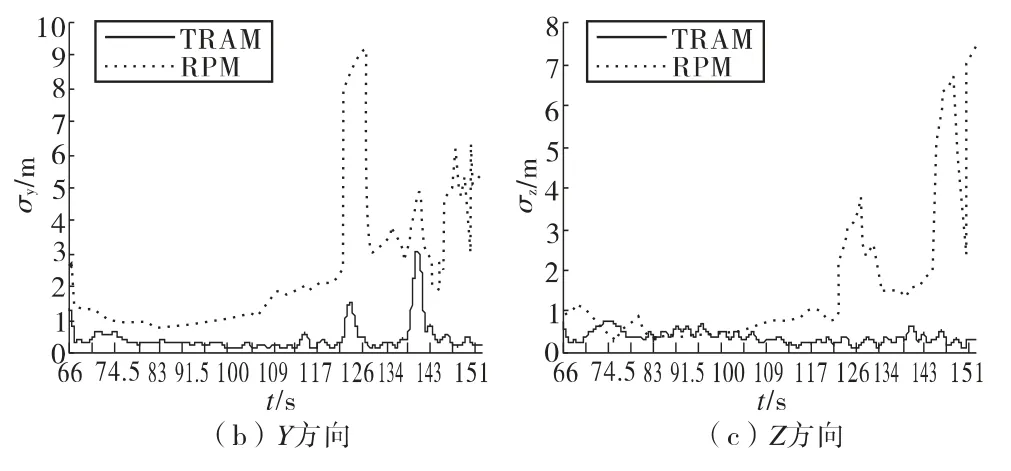
图3 两种方法计算位置精度结果
4 结束语
文中根据靶场测控设备布站的实际情况,提出了光学和雷达设备数据联合测量的融合定位方法。仿真结果表明,该算法不受布站几何影响;相比于雷达单台定位,文中方法计算的弹道结果更加平稳,计算坐标精度也优于雷达单台定位结果,与光电经纬仪定位指标精度相当。
[1]吕俊伟,何友金,韩艳丽.光电跟踪测量原理[M].北京:国防工业出版社,2010:1-3.
[2]项树林,徐宁.一种改进的光电经纬仪两站交会测量方法[J].应用光学,2009,30(1):80-83.
[3]侯宏禄,周德云.光电经纬仪异面交会测量及组网布站优化设计[J].光子学报,2008,37(5):1023-1028.
[4]吴能伟,陈涛.基于最小二乘估计的多站交会方法[J].光电工程,2008,35(12):1-4.
[5]胡峰.变系数线性模型参数的递推估计[J].自动化学报,1994,20(5):628-631.
[6]卢海波.光电经纬仪与雷达交会测量[J].长春理工大学学报,2003,26(3):92-94.
[7]朱志宇.基于红外和雷达数据融合的机动目标跟踪方法[J].激光与红外,2007,37(2):170-174.
猜你喜欢
现代经济信息(2022年35期)2023-01-11 02:41:18
宇航计测技术(2022年2期)2022-06-01 09:34:44
测控技术(2018年3期)2018-11-25 09:45:50
中学生数理化·七年级数学人教版(2018年4期)2018-06-28 03:26:28
新能源汽车报(2018年47期)2018-05-14 14:06:16
数学大世界(2018年1期)2018-04-12 05:39:03
水利规划与设计(2017年5期)2017-06-09 08:56:41
中等数学(2017年2期)2017-06-01 12:21:50
百科探秘·航空航天(2016年9期)2016-12-01 03:04:22
系统工程与电子技术(2016年7期)2016-08-21 13:58:56
