基于免棱镜全站仪的竖井高精度测量
2013-12-06 08:33:30曾怀恩刘金平
测绘工程 2013年3期
曾怀恩,刘金平
(1.三峡大学 土木与建筑学院,湖北 宜昌 443002;2.三峡大学 三峡库区地质灾害教育部重点实验室,湖北 宜昌 443002;3.中交二航局第二工程有限公司,重庆 400042)
为了测试一种利用声音检测竖井(孔)三维形状的仪器(研制中)的准确可靠性,利用该声检测仪器与商用测量仪器测定同一口竖井的三维形状,通过两个三维形状的比对,进行分析和评价。声检测仪器测量精度较高,为了实现有效比对,要求测量仪器测定竖井的三维坐标在毫米级内。从测量速度和效率来看,三维激光扫描仪无疑是最佳的测量仪器选择,但是三维激光扫描仪昂贵,购置或租赁成本对于实验来说都难以承受。通过竖井现场踏勘以及考虑到实验经济性,最终选定的测量仪器为免棱镜全站仪。本文将就竖井测量中遇到的问题进行介绍,并提出相应的解决办法,实现基于免棱镜全站仪的竖井高精度测量。
1 竖井测量中的问题
需要测量的竖井位于某实验室内,其形状、尺寸如图1所示。图1中从上往下,井口半径为R1,R2,R3,越来越小,井底有近0.2m深的积水和少量淤泥。测量要求井壁凸凹变化越大的地方测量点越密,测量点的密度为相邻两点之间距离不超过8~10cm(竖井上部半径R1的柱面因较规则,测量点密度可放宽),以精确反映竖井三维形状,测量点位精度在毫米级内。实验时在井壁上测量点按网格挑选,相邻点距离满足测量要求,同时保证测量点的均匀性;测量仪器选用了三鼎STS-772R全站仪,其测角精度为2″;距离测量测程为免棱镜时350m,距离测量精度为免棱镜时5mm+3ppm,在竖井测量几米范围内可以到达毫米级点位精度要求。
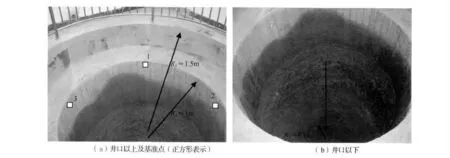
图1 竖井及3个基准点点位图
由于竖直角测量范围(约-45°~+90°)的限制,若将全站仪安置在井口边缘地面,仪器高约1.5m,则井内可测量到的最低点距井口约1.5m,井最下端约2.5m高的范围内的点位不通视,无法测得,如图2所示。图2中为了描述方便,将不规则的井口径进行近似。为解决上述不通视问题,传统的竖井测量中,通常进行联系三角形测量将地面坐标和方位传递到井底,再进行井底测量[1-3]。为了回避繁琐的联系三角形测量,本文采用自由设站和再坐标转换的竖井测量方法。①将全站仪安置在井口边缘地面进行井上部分的测量,而且受视线的遮挡限制,一次安置仪器只能观测井壁约一半的范围,仪器下方井壁无法测量,所以至少要进行一次搬站;②将全站仪安置在井底进行井下部分的测量,视线对仰角无限制,但对俯角同样存在不小于-45°的限制,因此,要将仪器安置低一点(可将仪器投射激光调为常亮模式,操作仪器时不用眼睛瞄望远镜,直接瞄准激光点即可),尽量观测到井底深一些的点位,实际测量时,仪器高约1m,可测量井最低点距井底积水水面约0.4m。将仪器安置在井底时,因井底无控制点,也无法与井口边缘地面安置的仪器通视,只能进行自由设站。为了与地面上安置仪器测量坐标统一,特在井壁上方选了3个测量基准点,分别贴上了反射片,点位如图1所示,将全站仪安置在井口边缘地面、井底后,分别测定3个基准点在两套自由坐标系内的坐标,然后利用坐标转换方法将两套坐标统一。
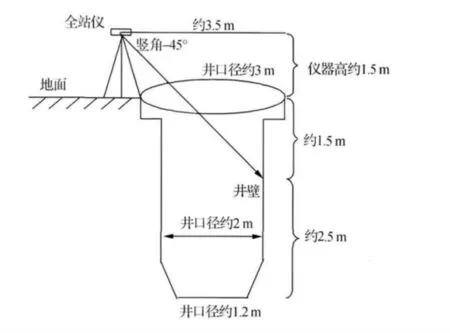
图2 竖井及3个基准点点位示意图
2 坐标、高程系统的统一
测量开始时,在井口边缘地面上选取一点并做了标记,将全站仪安置在该点上,假定该点北坐标、东坐标、高程均为0,通过罗盘确定正北方向进行定向,然后测量竖井上部半径R1的柱面上的可通视的点位,以及3个测量基准点;之后,将全站仪进行搬站,测量竖井上部半径R1的柱面上未测量到的点位;最后,将全站仪安置在井底,进行自由设站(假定设置点坐标、高程均为0),测量了井下部点位,包括3个测量基准点。获得的3个测量基准点的两套坐标见表1,表1中将地面、井底自由设站测量的坐标分别简称为地面坐标和井底坐标。
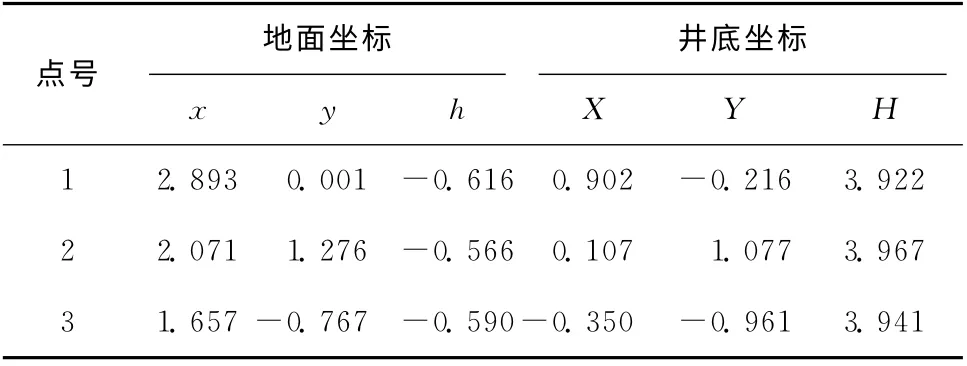
表1 基准点的两套坐标 m
由于测井区域较小,采用平面坐标相似转换法求解井底坐标到地面坐标的转换参数,转换数学模型为

其中:i为点号,x0,y0为坐标平移参数,k为尺度因子,ε为旋转角,要求解该四参数,要求至少联测两个基准点。为了方便计算,令kcosε=a,ksinε=b,则式(1)改写成矩阵形式为
当基准点个数为n(n≥2)时,可建立2n个形如式(2)的方程,其最小二乘解为

其中:
P为权阵,一般令P为单位矩阵,l=[x1y1…xnyn]T。
为了检验坐标转换参数的可靠性,将基准点1、2坐标带入式(3)求解转换参数,再将基准点3的已知坐标与转换得到的坐标比对,评价转换精度。
解算得到的转换参数为:x0=1.987 1,y0=0.197 5,a=0.999 214 801,b=0.021 364 449,0.021 377 981rad,即ε为1°13′29.525 1″。解算中,注意到因自由设站获得坐标数值较小,A矩阵各元素量级相当,矩阵ATA条件数为4.8(较好),式(3)计算没有出现局域平面坐标变换中常见的病态性(一般可通过坐标重心化处理消除)[4-7]。将基准点3的井底坐标带入式(1)得到其地面坐标为[1.658,-0.770],与 已 知 坐 标 较 差 为[0.001,-0.003],即平面位置较差为0.003m。
由于测井范围很小,高程转换模型可取为

式中:Δh为高程转换参数,是一个常数,可由3个基准点分别算出Δh,再取均值作为最终结果。3个基准点分别算出高程转换参数为-4.538、-4.533、-4.531,三者最大较差为0.007m,可见高程测量精度较高,最终Δh取值为-45.534。从上述分析可知,竖井点位测量精度达到了毫米级。
3 竖井测量结果与分析
将井底坐标和高程通过式(3)和式(4)转换,可得到统一的地面坐标。测量共获得2 361个点位坐标和高程,利用MATLAB 7.1绘制竖井三维散点图,如图3所示,图中用十字叉符号表示测量基准点。利用MATLAB 7.1图形工具中的“旋转3D”可以直观查看竖井三维形状[8]。声检测仪器通过声测距原理也可测定竖井的三维形状,为了检测其测量精度,可与免棱镜全站仪测量竖井三维形状进行匹配分析,匹配基准可选用竖井中比较明显的特征点和线,如图3所示的两条突出线。
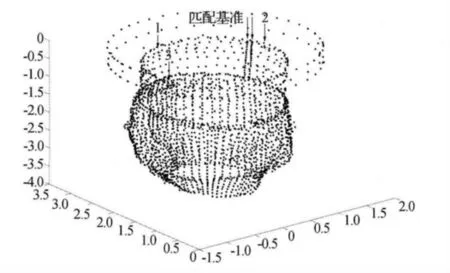
图3 竖井三维散点图
4 结束语
受测量仪器竖直角观测范围限制,井上边缘地面设站仪器与井底存在不通视的问题,测量中通常采用联系三角形测量将地面坐标和方位传递到井底,再进行井底测量。本文不采用联系三角形测量,而进行井上地面及井下自由设站测量。为了将两次自由设站测量坐标统一,测量中联测井口3个基准点,然后利用基准点坐标、高程求得两套坐标、高程转换参数,实现两套坐标、高程之间的转换。这种竖井测量方法避开了繁琐的联系三角形测量工作,提高了测量效率,为竖井测量提出了一种新思路。利用高精度测量数据,绘制竖井三维散点图,为测试声检测仪器检测竖井三维形状准确可靠提供标准模型,达到良好效果。
[1]罗三明,万文妮,高培芝,等.盾构工程竖井联系测量数据处理方法研究[J].大地测量与地球动力学,2007,27(5):123-127.
[2]姬晓旭,刘成龙,何波.竖井联系测量的新方法及其应用[J].铁道勘察,2009(5):14-17.
[3]陈方敏.吊钢丝联系三角形法在隧道测量大型深竖井定向中的应用[J].城市勘测,2010(2):135-137.
[4]姚宜斌.平面坐标系统相互转换的一种简便算法[J].测绘信息与工程,2001(1):1-3.
[5]刘陶胜,黄声享,罗力,等.基于重心基准的平面坐标转换研究[J].大地测量与地球动力学,2011,31(2):102-106.
[6]曾怀恩,黄声享.三维坐标转换参数求解的一种直接搜索法[J].武汉大学学报:信息科学版,2008,33(11):1118-1121.
[7]Huaien Zeng,Qinglin Yi.Quaternion-based iterative solution of three-dimensional coordinate transformation problem[J].Journal of Computers,2011,6(7):1361-1368.
[8]周开利.Matlab基础及其应用教程[M].北京:北京大学出版社,2007.
猜你喜欢
工业安全与环保(2022年5期)2022-05-17 07:22:04
华中建筑(2022年4期)2022-04-14 07:50:52
装备制造技术(2021年4期)2021-08-05 07:40:24
现代测绘(2021年1期)2021-04-28 10:19:56
制造技术与机床(2018年12期)2018-12-23 02:41:18
水利规划与设计(2017年8期)2017-12-20 08:24:14
测绘科学与工程(2016年4期)2016-04-17 06:51:08
河南科技(2014年16期)2014-02-27 14:13:09
金属矿山(2013年6期)2013-03-11 16:53:59
化学分析计量(2013年3期)2013-03-11 16:37:20