一种自适应Retinex的航空影像阴影消除方法
2013-12-06 08:33:14阮心玲
测绘工程 2013年3期
杨 玲,阮心玲,李 畅
(1.河南大学 环境与规划学院,河南 开封 475004;2.河南大学 中澳地理信息技术与应用研究中心,河南 开封 475004;3.华中师范大学 城市与环境学院,湖北 武汉 430079)
由于太阳光不能穿越实体建筑物,所以阴影的存在不可避免,特别是建筑物比较密集的城市区域。所以城区的航空影像中,存在着大量的建筑物阴影区域,这些阴影区域提供了某些关键地物如高大建筑物存在的证据,可以作为检测它们的依据之一,但是阴影区域的存在也给航空影像的进一步处理与识别带来了困难。建筑物的阴影区域内往往包含一些重要的信息,如矮小建筑物、建筑物的背阳墙面、道路、树木等,阴影的存在给这些物体的特征提取和识别带来了极大的困难,必须对其进行补偿或消除。
以往受航空影像分辨率和计算硬件条件的限制,像片中的阴影问题并不突出,近年来,随着航空影像分辨率的提高、计算机硬件的日新月异以及航空影像应用研究飞速发展,阴影带来的影响越来越大,阴影消除的研究受到越来越多的重视。
Suzuki等人[1]提出一种动态的航空影像阴影补偿方法,其利用色彩和空间概率分析而后进行动态补偿,能有效的提高阴影区域的对比度,但补偿后阴影仍然存在,而且空间概率的获取需要事先利用大样本进行统计分析,不能实现单张航片的实时处理或者局部区域阴影的消除。Kobus Barnard[2]等提出了一种利用颜色比率消除阴影的方法,这种方法是基于对角光照模型的,但是大部分图像并不满足此模型,而且算法过于复杂,算法参数需要很多的专用设备,花费较多的时间才能获得。Finlayson等人[3]采用Retinex早期的任意路径法设计了一种阴影消除方案,但计算量较大,而且需要准确地提取阴影区域的边缘,这显然是很难实现的。唐亮[4]等人使用基于模糊Retinex的阴影消除方案对城市航空影像的阴影消除,其将图像模糊的划分为阴影和非阴影区域,采用像素色调值检测阴影其计算也较为复杂。肖志级[5]等人提出了边缘模糊Retinex算法进行城市彩色航空影像中的阴影消除,其阴影进行模糊分类后利用中心环绕Retinex算法增强阴影区域,其计算方法依然复杂。为此,本文提出一种自适应单尺度Retinex算法,其算法较为简单,但能有效地对阴影区域进行增强。
1 Retinex理论及其发展
20世纪50年代中期,美国物理学家Edwin Land在进行三原色的投影实验时发现红、白二色出现在屏幕上,这个现象是传统的色彩理论无法解释的,经过多年的研究,Land发现在视觉信息的传播过程中,人类的视觉系统对这些视觉信息进行了一些特殊的处理,去除了光源强度和照射不均匀等一系列不确定因素,只保留了反映物体本质特征的信息[6]。当这些描述物体本质特征的相关信息传递到大脑皮层后,经过更加复杂的信息处理,才最终形成了人的视觉。
基于上述认识,1963-12-30Edwin.Land以人类视觉的亮度和颜色感知为模型在俄亥俄州提出了一种颜色恒常知觉的计算理论,即Retinex的色彩理论。Retinex模型的理论基础为:真实世界是无色的,人眼所感知的颜色是光与物质相互作用的结果;每一种颜色都是由三原色构成和决定的。Retinex本身是一个合成词,它是由视网膜(Retina)和大脑皮层(Cortex)这两个词组合而成的,故Retinex理论又被称为视网膜大脑皮层理论[7]。
从物理光学可知,在正常情况下,抵达视网膜或者其它成像器件的像元的颜色信号是环境入射光强度与场景中某点的表面反射率的乘积,表示为

式中:R(x,y)为某颜色通道的像素(x,y)处的表面反射率,L(x,y)为相应像素位置的入射光强度,I(x,y)为图像的像素值。也就意味着影像的像素值大小由入射光和物体的反射率共同决定。基于这一理论,Retinex将图像I分解为光照图像L与反射图像R两个相互独立的部分,通过消除光照的影响恢复由于光线变化而丢失的信息,从而达到增强的目的。
Retinex算法在发展的几十年间,出现了多种不同模型的Retinex算法,主要有任意路径算法(random walk Type)[8-9]、同 态 滤 波 的Retinex算法[10-11]、基于泊松方程(Poisson Equation Solution)的Retinex算法[12-14]、非线性滤波Retinex方法、单尺度Retinex、多尺度Retinex以及中心环绕Retinex算法等。
尽管有许多不同的算法,但是这些算法也存在一定的相似性,大致流程如图1所示[15],主要流程为先将影像分离为入射光和反射光两个部分,然后对反射图像进行操作以提取入射光线,从而产生不受光照非均衡性影响的、动态范围压缩较好的、令人满意的图像。

图1 基于Retinex理论增强算法的一般流程[15]
Retinex理论能够很好地解释某些视觉现象,并且己经获得了大量的实验支持,在20世纪80年代已被美国宇航局用于处理航天器拍摄的外层空间图像且获得了非常好的处理效果。
2 单尺度Retinex
单尺度Retinex(Single-Scale Retinex,SSR)算法是由Jobson等人在1997年提出的[10],该算法可以描述为

式中:Ii(x,y)表示输入影像的第i个颜色通道,*表示卷积运算,Ri(x,y)表示Retinex的输出,F(x,y)为高斯函数,其表达式为
式中:σ为概率分布的标准差,是高斯滤波器唯一的参数;r为高斯滤波器的模板半径,不同的σ是由不同的高斯滤波器掩膜形成的。
2.1 r与σ的关系
设X为连续型随机变量,若X的概率密度满足
则称X服从正态分布,记为:X~N(μ,σ2)。其中μ,σ为2个不确定的常数,是正态分布的参数,不同的μ、不同的σ对应着不同的正态分布。
根据正态分布的函数可知概率分布的标准差σ与滤波器的邻域半径r存在相关性,为:r越大σ越大,r越小σ越小。
由概率分布理论可知,在正态曲线下,横轴与曲线间的面积和恒为1,横轴区间μ+σ内的面积为68.72%,横轴区间μ+1.64σ内的面积为90.00%,横轴区间μ+1.96σ内的面积为95.00%,横轴区间μ+2.58σ内的面积为99.00%。因此,可以近似认为正态随机变量的值全落在[μ±3σ],这就是“3σ规则”。
根据高斯函数的性质,在高斯滤波器中,离模板中心点越近的像素点权值越大,反之权值越小。遵循“3σ规则”,可以认为在高斯模板中,与中心点距离超过3σ的像素点权重极小,可以忽略不计。
因此,在本文讨论Retinex算法中,认为高斯模板的半径r与高斯函数的标准差σ之间满足r=3σ。
2.2 参数σ对SSR的影响
由于σ是高斯滤波器唯一的参数,也是SSR的一个关键参数,称为尺度参数,它直接决定着SSR的性能。σ越小,SSR的动态压缩能力越强,图像中阴暗部分的细节能够得到较好的增强,但输出图像失真严重;反之,σ越大,图像保真越好,但动态压缩能力减弱。所以对于SSR算法,需要一个适当的参数σ以得到一个比较理想的结果。众多实验都认为80是一个理想的取值[7,16-18]。
3 自适应单尺度Retinex算法
由于单尺度Retinex算法需要人工设定参数,其增强结果往往取决于人的经验,在一定程度上影响算法的方便性与自动化程度。所以本文提出一种自适应的单尺度Retinex算法。
根据本文第三部分所述,单尺度Retinex算法只有一个参数,即高斯函数的标准差σ,只要能自动确定σ,就能实现自适应单尺度Retinex算法。而在以往的试验中,一般认为高斯模板的半径取r=80(即σ=80/3)是个适当的尺度,即采用161×161个像素点的高斯邻域。但r=80只是一个经验值,不意味着这个取值适用于所有的情况。
用高斯滤波器进行平滑的目的是得到低通滤波图像。为了使整幅影像均衡化,选择整幅影像的灰度均值作为高斯函数尺度(由于实验所使用的影像为灰度图像,所以此算法只针对灰度图像)。
由于高斯滤波器是一种线性平滑滤波器,即通过使用连续窗函数内像素的加权来实现平滑的滤波器。通过上文对高斯函数的分析可知,参数σ越大,平滑程度越大;反之,平滑程度越小。因此高斯函数的标准差σ的计算问题即为判断当前像素点对应的图像区域的平滑度问题。
设影像的灰度均值为M,I(x,y)为坐标为(x,y)处像素点的灰度。
若影像大小为row×col,则影像的灰度均值为

当整个影像区域为完全平滑区时,即影像内所有点的灰度值相等时

令:

由于r=3σ,确定r即可得到自适应单尺度Retinex的唯一参数σ。
具体运算过程如下:
①将式(1)两边取对数,将入射光分量和反射光分量表示成和的形式,为

②用高斯模板对原图像做卷积,得到低通滤波后的图像D(x,y),设高斯函数为F(x,y),则有

③在对数域中,用原始图像减去低通滤波后的图像即可得到高频增强图像,为

为了避免像素值为0时取对数没有意义,令所有灰度值为0的像素灰度值等于1。
4 实验与结果分析
利用本文所提出的自适应Retinex算法对建筑物的阴影地区进行实验,并与直方图法增强,尺度为80的SSR算法相比较,实验证明,所提出的自适应方法取得良好的结果。实验结果如图2所示。图2(a)为一幅8bit的带有阴影的灰度图像,图2(b)为直方图均衡增强结果,图2(c)是按照传统取r=80的单尺度Retinex增强结果,图2(d)为本文所提出自适应单尺度Retinex算法的增强结果。
为验证实验效果,分别对原始图像和增强后的图像进行以相同的算法与参数进行直线提取,图2(e)与图2(f)为对原始图像与自适应算法增强后影像边缘提取结果。
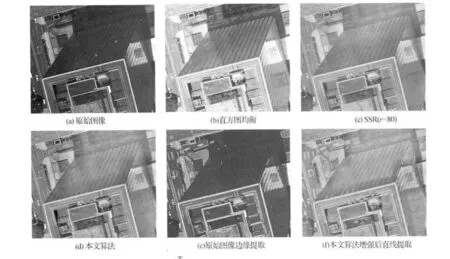
图2 增强效果对比
从图2可以看出,原始图像整体灰度值偏低,在进行下一步处理(如边缘提取)前必须进行增强,直方图均衡增强后,影像的整体灰度值得到明显的提高,但是灰度值较高的部分锐化严重;在使用r=80的单尺度Retinex和所使用的自适应Retinex增强后,图像亮度得到明显提升,边缘等细节保存较好。本文所使用的自适应方法亮度比较均匀,亮度提升程度与r=80时的效果比较接近,人眼看起来比较舒适,但是所提出自适应算法的计算时间比r=80的计算时间要短,其原因在于研究中所使用的图像,原始图像的灰度均值为45左右,远小于80,所以进行高斯平滑时模板半径小于r=80时的模板半径,能减少运算量,提高运算速度。
对影像进行边缘提取后发现,原始影像上建筑物底部几乎没有提取到线特征,而自适应算法增强后,底部部分边缘线特征被提取出来。
一般来说,需要增强的影像通常灰度值较低,所以采用灰度均值作为尺度是一个比较可行的办法,既能达到较好的增强效果,又能减少计算时间。本研究在基于航空影像的建筑物三维重建方面具有广阔的前景,尤其适用于大规模建筑物三维重建与提取。
[1]Suzuki A,Shio A,Arai H,et al.Dynamic Shadow Compensation of Aerial Images Based on Color and Spatial Analysis[C].In:Proceedings of 15th International Conference on Pattern Recognition,2000:317-320.
[2]Barnard K,Finlayson G.Shadow identification using color ratios[C].In:Proceeding of the IS&T/SID Eight Color Imaging Conference:Color Science,Systems and Application,2000:97-101.
[3]Finlayson D,Hordley S D,Drew.M S.Removing shadows from Images Using Retinex[C].In:Proceedings of IS&T/SID Tenth Color Imageing Conference:Color Science,Systems and application,2002:73-79.
[4]唐亮,谢维信,黄建军.城市彩色航空影像中的阴影检测[J].中国体视学与图像分析,2003,8(3):129-134.
[5]肖志级,黄建军.城市彩色航空影像的边缘模糊Retinex阴影消除[J].中国体视学与图像分析,2004,9(2):95-98.
[6]Land E H.The Retinex Theory of color vision[J].Scientific American,1977,237(36):108-129.
[7]李学明.基于Retinex理论的图像增强算法[J].计算机应用研究,2005(2):235-237.
[8]Land E.Recent Advances in the Retinex Theory and Some Implications for Cortical Computations:Color Vision and the Natural Image[Z].Washington:1983:80,5163-5169.
[9]Land E,Mccann J.Lightness and Retinex Theory[J].Journal of the Optical Society of America,1971,1(61):1.
[10]Jobson D J,Rahman Z,Woodell G A.Properties and Performance of the Center/Surround Retinex[J].IEEE Transactions on Image Processing,1997,6(3):451-462.
[11]Jobson D J,Rahman Z,Woodell G A.A Multiscale Retinex for Bridging the Gap Between Color Images and the Human Observation of Scenes[J].IEEE Transactions on Image Processing,1997,6(7):1.
[12]Blake A.Boundary Conditions of Lightness Computation in Mondrian World[C].In:Computer Vision Graphics and Image Processing 1985:314-327.
[13]Horn B K P.Determining Lightness from an Image[J].Computer Graphics and Image Processing,1974,3(4):277-299.
[14]Terzopoulos D.Image Analysis Using Multigrid Relaxation Methods[C].In:IEEE Transactions on Pattern Analysis and Machine Intelligence,1986:129-139.
[15]Kimmel R,Shaked D,Elad M,et al.A Variational Framework for Retinex[J].International Journal of Computer Vision,2003,52(1):7-23.
[16]唐亮,谢维信,黄建军,等.城市航空影像中基于模糊Retinex的阴影消除[J].电子学报,2005,33(3):500-503.
[17]史延新.一种基于Retinex理论的图像增强算法[J].电子科技,2007(12):32-35.
[18]陈雾.基于Retinex理论的图像增强算法研究[D].南京:南京理工大学,2006.
猜你喜欢
数学小灵通(1-2年级)(2024年4期)2024-05-14 09:30:52
文苑(2020年11期)2020-11-19 11:45:11
中国诗歌(2019年6期)2019-11-15 00:26:47
小学生学习指导(低年级)(2019年6期)2019-07-22 03:33:10
电子制作(2019年11期)2019-07-04 00:34:38
电子制作(2018年16期)2018-09-26 03:26:50
中学生数理化·八年级物理人教版(2017年11期)2017-04-18 11:22:54
系统工程与电子技术(2016年7期)2016-08-21 13:59:02
数学大王·中高年级(2016年4期)2016-05-14 12:56:02
火控雷达技术(2016年2期)2016-02-06 02:29:00