基于双闭环PI控制的电动车桥驱动控制系统建模与仿真
2013-12-03 08:17:04俞传阳常可娟
山东交通学院学报 2013年3期
俞传阳,常可娟,郑 泉*,袁 剑
(1.安徽农业大学 工学院,安徽 合肥 230036;2.安徽安凯福田曙光车桥有限公司,安徽 合肥 230051; 3.合肥美桥传动系统及底盘有限责任公司,安徽 合肥 230000)
随着人类对环境和能源保护意识的增强,电动汽车需求量越来越大。电动车桥作为电动汽车的重要总成部件,直接影响着电动汽车的控制性能。目前针对电动车桥的研究主要集中在电驱动系统、驱动电机和传动部件参数匹配以及驱动控制策略的开发研究方面。文献[1]研究了电动汽车驱动电机和传动系统的参数匹配问题,得出在城市行驶的汽车车速经常处于30~50 km/h,采用固定比的传动系是可行的,可以减少车重,增加行驶里程;文献[2]研究了驱动电机与前驱动桥的耦合振动问题;文献[3]以FreescaleS12为中央芯片对电动客车驱动控制系统进行了研究与开发。
本文以电动车桥的核心驱动部件——永磁无刷直流电机(Magnet Brushless DC motor,BLDC)为研究对象,采用双闭环PI控制策略,在Matlab/Simulink中构建以BLDC为核心的驱动控制仿真系统并进行仿真研究;以STM8S105S4为中央处理器搭建硬件控制系统,并进行相关实验。
1 永磁无刷直流驱动电机的数学模型
1.1 驱动电机的端电压方程
BLDC所产生的理想反电动势为梯形波,用坐标转换的方法进行分析十分困难。在建立模型时可利用其本身的相变量构建电机数学模型,分析时可以假设驱动电机三相绕组在空间上完全对称,忽略涡流和磁滞损耗的影响,且电机的磁场不饱和;三相绕组不设有中线并采用行星连接。三相电流满足
ia+ib+ic=0,
由此可以得到简化后的BLDC三相电压平衡方程为
(1)
式中Ua、Ub、Uc为三相定子端电压,V;ea、eb、ec为三相定子实时产生的感应电动势,V;ia、ib、ic为三相定子绕组适时相电流,A;R为三相定子绕组的相等效电阻,Ω;L为三相定子的自感, H;M为三相定子绕组之间的互感,H。
1.2 驱动电机的电磁转矩方程和运动方程
BLDC的电磁扭矩由感应电动势和相电流作用产生,其电磁转矩方程可表示为
Te=(eaia+ebib+ecic)/ω,
(2)
式中ω为电机的角速度。
BLDC运行时主要考虑外部施加力矩、电机阻尼矩和转子加速阻力矩,用运动方程表示的电磁转矩为
Te=Tl+Bω+Jdω/dt,
(3)
式中Tl为负载转矩,N·m;B为阻尼系数;J为电机的转动惯量,kg·m2。
转子角度θ可以由ω经过一次积分获取。
Simulink中没有自带BLDC电机本体模块,需另行建立。BLDC的感应电动势由分段线性法[4]求出,利用S函数编写感应电动势函数和参考电流函数。图1给出了BLDC本体模块的Simulink模型。BLDC本体模块由电机、转矩和运动3部分组成,其理论公式分别见式(1)~(3)。

图1 BLDC本体模块
1.3 基于双闭环PI控制的仿真模型
仿真模型主要由转速PI控制、参考电流、PWM(Pulse Width Modulation,脉宽调制)、电压逆变器、电机本体和显示等模块组成,图2给出了转速环、电流环双闭环PI控制的Simulink模型。

图2 基于双闭环PI控制的仿真系统模型
1.4 仿真实验
仿真前相关数据设置:阻尼系数B=0.000 2 N/(m·s-1),自感系数L=0.025 H,互感系数为0.001 H,定子相电阻为0.015 Ω,电机转动惯量为0.05 kg·m2,PI比例系数kp=10,PI积分系数ki=2.0。
仿真中电机带负载10 N·m启动,在运行0.25 s时突然加载15 N·m,仿真时间设为0.5 s,转速为900 r/min。其仿真结果见图3、4。

图3 转速响应 图4 转矩响应
由图3可以看出,电机启动后稳定转速约为893 r/min,稳态误差为0.78%,稳态响应时间为0.18 s。突然加载后,电机扭矩输出响应迅速,速度波动小,满足控制要求。
2 双闭环PI控制实例
以仿真系统模型为参考,以STM8S105S4为中央处理器设计了双闭环PI控制器,控制器的控制原理图如图5所示;控制器的硬件电路由STM8S105S4最小系统、驱动控制、转子位置检测、电流采集、电源监控、驱动电路等模块组成。

图5 控制器控制原理图
2.1 控制软件

图6 中断处理子程序流程图
软件通过程序模块化进行设计,主要包含系统数据初始化、电机调速控制、数据采集和系统保护等系统。控制系统通电后,执行初始化程序对初始状态进行设定;系统定时计算电机转速和对电机相电流信号进行A/D采样,并与给定参考转速进行比较判断,达到给定转速则保持并退出转速PI控制,否则进行转速PI调节;同时系统适时监控各部件的运行状态,一旦出现故障则触发相应的保护措施。主程序为:初始化→A/D数据采样→达到给定转速→中断处理程序。中断处理子程序如图6所示。

图7 控制器与外接设备
2.2 试验
本文借助NI数据采集设备PXI-1036对电机空载转速进行采集,试验所需设备如图7所示。
试验说明:控制器将电机的目标转速设定为900 r/min,电机空载启动;转速采集由NI数据采集设备提供,并在LabVIEW软件中以图形化界面显示,采样频率设定为10 kHz。
2.3 结果分析
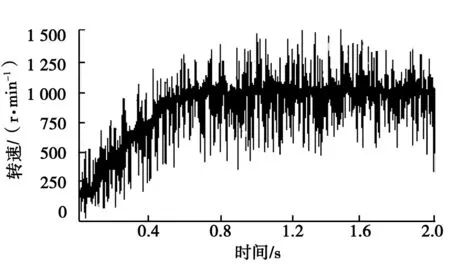
图8 转速采样波形
经过反复试验,最终设定kp=18.7,积分系数ki=1.2,此时测得电机空载转速如图8所示。由图8可以得出,电机达到900 r/min的响应时间为0.55 s左右,电机稳定转速在945 r/min左右。试验结果和仿真结果相比,电机响应时间相差较大,但稳定转速相差较小,造成这种情况的原因可能是采用的8位单片机运算能力不足以及控制程序未达最优化等。
本文提供的一种基于双闭环PI控制策略适应于电动车桥的驱动控制,为电动车桥驱动控制系统进一步开发提供一种设计思路。
参考文献:
[1]姬芬竹,高峰.电动汽车驱动电机和传动系统的参数匹配[J].华南理工大学学报:自然科学版,2004,34(4):32-37.
[2]薛玉春,张威,王连加,等.电动汽车驱动电机及前驱动桥的耦合振动研究[J].武汉理工大学学报,2010,32(15):85-89.
[3]赵轩,肖广朋,马建,等. 纯电动汽车驱动控制器研究与开发[J].科技导报.2012,30(06):30-35.
[4]殷云华,郑宾,郑浩鑫.一种基于Matlab的无刷直流电机控制系统建模仿真方法[J].系统仿真学报,2008,20(2):293-298.
猜你喜欢
防爆电机(2021年1期)2021-03-29 03:02:46
哈尔滨铁道科技(2020年4期)2020-07-22 02:22:28
测控技术(2018年2期)2018-12-09 09:00:52
黑龙江电力(2017年1期)2017-05-17 04:25:05
环境科技(2016年5期)2016-11-10 02:42:12
电源技术(2015年12期)2015-08-21 08:58:44
电测与仪表(2015年12期)2015-04-09 11:44:44
电机与控制应用(2015年10期)2015-03-01 03:50:16
系统工程学报(2015年2期)2015-02-28 19:53:43
电网与清洁能源(2015年2期)2015-02-28 16:03:12