
动电效应测井探测器电子系统设计
2013-12-03 10:30门百永鞠晓东乔文孝王德国卢俊强贺海龙
测井技术 2013年4期
门百永,鞠晓东,乔文孝,王德国,卢俊强,贺海龙
(1.中国石油大学油气资源与探测国家重点实验室,北京102249;2.北京市地球探测与信息技术重点实验室,北京102249;3.中国石油大学机械与储运工程学院,北京102249;4.中国石油集团测井有限公司华北事业部,河北 任丘062552)
0 引 言
动电效应(也称声电效应)在石油勘探方面有着重要的研究价值,特别是在地层渗透率的评价方面有着其他测井方法无法比拟的优势。国内外学者对动电效应在测井领域的应用开展了广泛的研究[1],如Zhenya Zhu和胡恒山[2]教授分别进行了动电效应的测井模型实验,并测量到了动电效应信号(声波激励时,接收到电场信号;交变电激励时,接收到声波信号)。为推进动电效应在测井领域的实际应用,中国石油大学(北京)联合麻省理工学院、哈尔滨工业大学和中国石油集团测井有限公司开展了动电效应测井探测方法的研究工作,中国石油大学(北京)研制了动电效应测井探测器及相应的电子系统。该电子系统与中国石油集团测井有限公司的EILog成像系统兼容,整个探测器的现场测试挂接在EILog系统上进行。
1 电子系统整体设计
动电效应测井探测器同时实现声波信号的激励、电信号的接收和电信号的激励、声波信号的接收,即同时实现传统的井下声波探测器和电法探测器的功能。动电效应测井探测器的基本功能单元为声波测井和电法测井探测器的基本功能单元(声波换能器和电极或线圈)。动电效应测井探测器[3]主要由1个声激励源(T)、3个声接收站(R1、R2和R3)、2个电激励电极(A和B)和4个电接收电极(E1、E2、E3和E4)组成。因此,电子系统主要实现以下2个功能。
(1)控制声激励源T的激励。既要处理和采集R1、R2和R3接收到的声信号,也要同时处理和采集E1、E2、E3和E4接收到的转换电信号及其差分信号。
(2)控制电极A、B的激励。既要处理和采集E1、E2、E3和E4接收到的电单端信号及E1和E2、E2和E3、E3和E4相减得到的差分信号,也要同时处理和采集R1、R2和R3接收到的转换声信号。
在2种模式下均采集声信号和电信号,这样可以同时测量地层中声信号和电信号的传播特性,以研究声、电转换关系。
根据动电效应测井探测器的结构和工作特征,研制了电子系统(见图1)。该电子系统主要由主控电路、高速仪器控制总线、电激励电路、声激励电路和声波信号、电极信号处理及采集电路组成。电激励电路和主控电路安装在上电子短节内,为提高声波信号和电极信号的信噪比,声波信号、电极信号处理及采集电路安装在承压密封电子仓内,承压电子仓就近安装在动电效应探测器内部。声激励电路安装在下电子短节内。各功能模块通过内部高速总线互联。动电效应探测器及电子短节的初步设计指标为耐温155℃,耐压100MPa。

图1 动电效应测井探测器电子系统结构示意图
2 电子系统设计
动电效应探测器测量的转换电信号和转换声信号非常微弱,且采集的均为波形信号,数据量大,因此,对模拟电路的信噪比、仪器内部的控制总线的通讯速度及主控电路的数据处理能力提出了很高的要求。为满足上述要求动电效应探测器电子系统采用分布式系统架构,各功能模块相对独立,通过高速仪器控制总线互联[4],有效降低相互干扰,提高模拟信号信噪比和系统控制的灵活性。
2.1 系统控制总线设计
探测器电子系统采用分布式结构,各功能模块都通过仪器控制总线(TMB)互联。为实现系统的协调、灵活控制和高速数据通讯,设计了基于高速差分信号的半双工高速互联总线。
TMB由2对低压差高速差分线组成,分别为差分时钟线和差分数据线,二者同步工作,便于降低该总线实现的复杂度和功耗。发送端同时驱动时钟线和数据线,输出数据与时钟同步,接收端同步锁存数据,使源节点和目标节点始终边沿敏感,最大限度地减少时延影响,获得最高传输带宽。
TMB为主从模式,主控电路为主控节点,电、声激励电路和电、声信号处理及采集电路为从节点。主控节点拥有总线控制权,其他节点只有在收到授权后才可以控制总线,否则只能处于接收状态。主控节点通过发送同步命令实现各节点协同工作。
2.2 系统主控电路设计
主控电路主要功能是实现基于TMB的系统控制、基于CAN总线的遥测接口和数据处理等功能[5]。主控电路采用典型的嵌入式架构,其结构框图见图2。
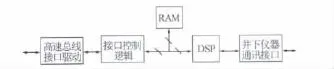
图2 主控电路结构示意图
主控电路是整个系统的控制中心和数据传输中心。在遥测命令驱动下,控制整个系统协调工作。主控电路控制核心为32bit带浮点单元的高速DSP,运行嵌入式操作系统,主要实现与遥测短节互联、仪器工作模式的控制、数据的缓存等功能。接口控制逻辑采用FPGA实现,主要完成高速互联总线的主控节点协议和数据的缓冲功能。高速总线接口驱动器实现逻辑信号与总线差分信号的相互转换。该系统与EILog成像测井系统遥测短节之间的互连通过CAN总线实现。
2.3 激励电路设计
激励电路包括声激励电路和电激励电路。声激励电路采用传统的变压器激励模式,为使声波能量集中辐射到目的地层提高换能器激发到地层中声波辐射能量,采用相控线阵技术实现对换能器的激励[6-7]。声激励电路原理见图3。

图3 声激励电路结构示意图
声激励电路主要由高速总线接口驱动器、逻辑控制器及多路换能器激励通道组成。逻辑控制器实现总线命令的接收、解析及各换能器激励的控制,系统主控电路可以通过高速总线动态设置声发射参数。换能器激励通道主要由激励驱动器、大功率VMOS管以及脉冲变压器等构成。多路激励通道在逻辑控制器的控制下,以一定的延时顺序产生3 800V的高压脉冲激励发射换能器,使声束集中入射目的地层,提高辐射到目的地层的能量,以获得有效的转换电信号。
电激励电路主要实现供电电极的功率激励,电激励电路原理见图4。该电路主要由高速总线接口驱动、逻辑控制器、DAC、功率放大器、检流器、差分放大器、电压衰减器、滤波器和ADC组成。逻辑控制器是电激励的控制核心,其接收系统总线命令,根据接收命令产生相应的数字激励信号,数字信号经DAC转换为模拟信号,模拟信号经滤波、功率放大后驱动激励电极。逻辑控制器同时控制ADC采集激励信号的幅度和电流,经处理后得到实际施加到激励电极的功率。激励信号的幅度和电流数据在本地缓存后经高速总线上传到主控电路,而后被主控电路经遥测上传到地面系统,以方便实验中及时调整激励功率。
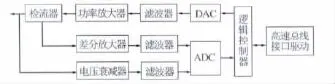
图4 电激励电路结构示意图
2.4 电、声信号处理及采集电路设计
动电效应探测器在工作中同时接收电信号和声波信号,并且二者都很微弱。因此,电、声信号处理及采集电路主要实现多路电信号和声信号的低噪声、大动态范围放大、高速同步采集及数据缓存等功能。为了实现对微弱信号的可靠有效检测,设计中将电、声信号处理及采集电路置于探测器内部的特殊密封承压舱室内。图5为置于密封电子仓内的声、电信号处理及采集电路示意图。该部分电路主要由声信号前置放大器、电单端信号放大器、电差分信号放大器、通道选择器、多通道程控放大及有源滤波器、多通道同步数据采集和逻辑控制器等组成。
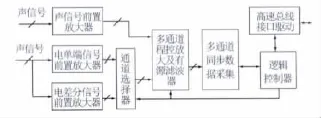
图5 电、声信号处理及采集电路原理示意图
经前置放大器处理后得到7路电信号和3路差分信号,其中3路声信号直接进入后级处理电路,电信号经过模拟开关选择为3路信号分时输出,因此,后级需要同时处理的模拟信号为6路,程控放大及有源滤波器和同步数据采集通道设计为6通道。每通道设计增益动态范围为90dB,以6dB步进。有源滤波器设计为带通滤波器,通带为2~22kHz,高通为四阶,低通为八阶。该滤波器有效提高信噪比,并使系统抗混叠动态范围达到140dB,充分满足16bit数据转换器的要求,数据转换器转换速率为500ksps。
逻辑控制器主要实现高速总线命令的接收、放大电路增益的控制、数据采集的控制、数据的缓冲、滤波处理及数据的高速上传等。该逻辑控制器在FPGA中实现,片内固化NIOS系统。利用FPGA内部丰富的控制逻辑、运算和数据存储资源及NIOS的实时控制功能实现数据采集的实时控制、波形数据的实时滤波及抽取处理,极大地减轻了主控单元的负担、降低占用仪器内部总线的带宽并提高了波形数据的信噪比。
3 主控软件设计
主控软件是运行于DSP中的嵌入式软件。开放源码的μC/OS-II操作系统具有执行效率高、占用资源少、实时性强和易扩展等优点[9],适合于井下资源有限的实时控制应用,因此,设计中选用μC/OS-II作为 RTOS。运行于μC/OS-II之上的任务主要有2个:一是CAN通讯任务;二是工作循环控制(见图6)。CAN通讯任务主要实现CAN控制器的初始化、与遥测短节的通讯。当DSP的CAN控制器接收到命令后,CAN中断服务任务以邮箱消息的形式将接收数据发送给CAN通讯任务。若邮箱消息是数据请求命令,则查询数据有效互斥信号量,若存在有效数据,则上传数据,若无有效数据则上传固定格式的填充数据。若CAN邮箱消息为下发控制命令及深度中断,则CAN通讯任务通过邮箱消息将该消息发送给工作循环控制任务。工作循环控制任务主要实现高速互联总线的控制及通过高速互联总线对仪器工作循环的控制。动电效应测井探测器有2种测量模式,因此,基本的控制循环也是2种。由于电信号处理放大及采集电路为3个通道,所以,每种测量模式需要3个循环才能完成所有电信号的采集。工作循环控制任务启动后,先初始化高速互联总线主控节点控制寄存器,并向各节点发送初始化参数,而后等待CAN通讯任务的邮箱消息。接收到CAN任务的消息后,根据接收的控制参数设置各节点控制参数,而后通过广播同步命令启动各节点同步工作,等待数据采集及处理完成后,通过高速串行总线读取数据,并存入本地SRAM中,若工作循环未完成,则根据控制参数进入下个循环。若设定的工作循环结束,则释放当前数据有效互斥信号量,供CAN通讯任务上传数据。
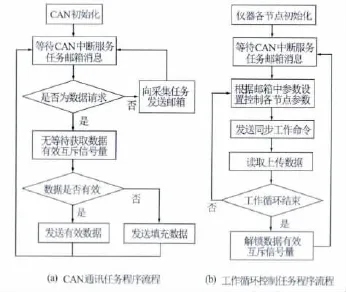
图6 CAN通讯任务和工作循环任务程序流程图
4 系统测试
动电效应测井探测器电子系统测试主要经历实验室测试和现场测试2个阶段。
实验室测试包括电子系统的高温测试和探测器与电子系统在水池中的联合模拟测井测试。该阶段测试时,整个电子系统挂接在自主开发的仿EILog遥测调试系统上。高温测试时激励通过高温线引出接实际负载,输入信号为信号发生器产生的正弦信号,电子系统工作在全额状态,恒温155℃/2h,系统工作稳定。水池测试是对电子系统及探测器工作性能的综合测试,也是对整个设计方案的实验室验证。水池测试中,电激励时接收到了信噪比良好的电信号,声激励时也接收到了信噪比良好的声波信号。测量时,水听器与探测器芯轴在同平面内,并在以激励换能器为圆心、半径为1m的圆弧上均匀分布的101个测量位置上分别记录激励换能器辐射的声波波形。图7为测得的激励换能器在垂直方向上的指向性图。从测试数据图7中可以看出,声束3dB角宽为30°左右,指向性良好。峰值声压约为68kPa,激励功率大。
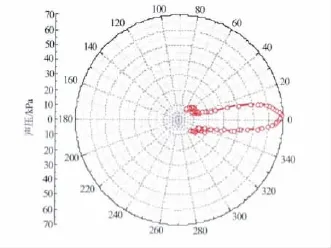
图7 激励声场的垂直指向性图
现场测试在华北油田任-91井裸眼井段进行,测量井段最深为3 926m,并进行了重复测量,测试的目的是检验仪器的耐温耐压性能和系统稳定性。整个测试过程中,电子系统工作稳定,测试波形如图8所示。从图8中可以看出,得到的波形基线平直、具有很好的信噪比,且声波波形的特征明显。由于该井段是非渗透的灰岩岩性,故没有看到明显的地层声电转换波,图8右图的电信号为发射探头附近高强度声波在井液与井壁作用下的转换波信号。
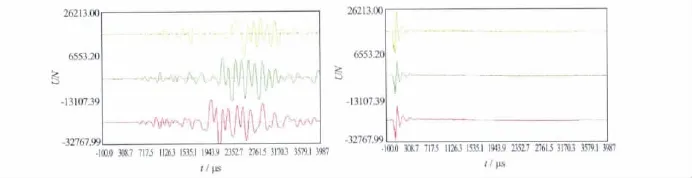
图8 任-91井现场测试曲线
5 结 论
动电效应测井探测器电子系统在额定的压力和温度条件下获得了良好的测试数据,且系统运行稳定,使得动电效应测井方法的实现成为可能,通过进一步的现场试验和波形反演开展动电测井在地层评价中的应用。
[1] 金鼎,孙宝佃,胡恒山,等.动电效应测井研究现状和展望 [J].测井技术,2010,34(24):309-312.
[2] 胡恒山,李长文,王克协,等.声电效应测井模型实验研究 [J].测井技术,2001,25(2):89-95.
[3] 卢俊强,鞠晓东,乔文孝.一种声电效应测量井下探测器:中国,201210280746.3[P].2012-08-08.
[4] 鞠晓东,乔文孝,李玉霞,等.多极子阵列声波测井仪电子系统研究 [J].测井技术,2008,32(1):61-64.
[5] 卢俊强,鞠晓东,成向阳.基于控制局域网的石油井下仪器互联技术研究 [J].测井技术,2006,29(3):96-98.
[6] 乔文孝,杜光升,陈雪莲.相控线阵声波辐射器在声波测井中应用的可行性分析 [J].地球物理学报,2002,45(5):714-722.
[7] 成向阳,鞠晓东,陆俊强,等.井下大功率多极子声波换能器激励源的设计 [J].中国石油大学学报:自然科学版,2007,31(6):40-43.
[8] Henry W Ott.电子系统中噪声的移植与衰减技术[M].王培清,李迪译.北京:电子工业出版社,2003:174-184.
[9] Labrosse Jean J.μC/OS-Ⅱ源码公开的实时嵌入式操作系统 [M].邵贝贝译.北京:北京航空航天大学出版社,2003:235-240.
猜你喜欢
测井技术(2022年3期)2022-11-25
成都信息工程大学学报(2021年4期)2021-11-22
科技传播(2019年24期)2019-06-15
中国宝玉石(2018年3期)2018-07-09
北京航空航天大学学报(2017年9期)2017-12-18
小猕猴智力画刊(2017年6期)2017-07-03
西南石油大学学报(自然科学版)(2016年2期)2016-12-01
中国煤层气(2015年4期)2015-08-22
西南石油大学学报(自然科学版)(2015年4期)2015-08-20
中国质量与标准导报(2015年2期)2015-02-28
