基于ICA的单矢量水听器多目标分辨
2013-12-02 06:07肖大为程锦房张景卓何光进
舰船科学技术 2013年2期
肖大为,程锦房,张景卓,何光进
(1.海军工程大学 兵器工程系,湖北 武汉430033;2.海军工程大学 理学院物理系,湖北 武汉430033)
0 引 言
声矢量水听器由传统的无指向性声压传感器和具有偶极子指向性的质点振速传感器构成,其可以同步、共点地测量声场空间一点处的声压和质点振速的各正交分量[1]。单矢量水听器利用目标声能流进行测量,可有效抑制各向同性干扰,提高目标信号的信噪比,实现目标的DOA 估计。但是,当在实际工作中存在多个目标信号,且信号方向矢量未知时,单矢量水听器测量的是各信号声能流的矢量和,无法估计某个目标的方位[2]。
独立分量分析[3](Independent ComponentAnalysis,ICA)是近年来由盲源分离技术(Blind Source Separation,BSS)发展而来的一种新的多维信号处理方法,其基本思路是将多维观察信号按照统计独立的原则建立目标函数,通过优化算法将观测信号分解为若干独立成分,从而实现信号的增强和分解。其应用领域包括语音识别、通信、图像处理和医学信号处理等领域[4-6]。JADE 算法是由Cardoso 提出的一种基于矩阵联合对角化的ICA 方法。该算法的主要特点是加强了算法的代数概念——引入了多变量数据的四维累积量矩阵,并对其作特征分解,如此既简化了算法,又提高了结果的稳健性[8]。
本文将单矢量水听器技术与JADE 算法原理相结合,提出一种新的单矢量水听器多目标分辨算法。在信号方向矢量没有任何先验知识的情况下,该算法可对单矢量水听器的阵列流型实现盲估计,并对混合信号进行分离,进而利用声能流逐次估计出多目标的二维到达角。本文最后用仿真实验验证了该算法的有效性。
1 单矢量水听器的阵列模型
假设空间有q 个窄带平面波信号时,以xi(t)表示第i 个信号,a(Θi)表示单矢量水听器阵列对第i个信号的导向矢量[9-11],即
式中:Θi=(φi,θi)为空间信号的二维空间到达角,φi为方位角,θi为俯仰角。
矢量水听器的输出为

式中:A=[a(Θ1),(Θ2),…,a(Θq)]T为4 ×q 维阵列流形;X(t)=[x1(t),x2(t),…,xq(t)]为q ×1 维信号向量;N(t)为4 ×1 维噪声向量。
2 JADE 盲分离算法原理
JADE 算法的基本步骤是先求出阵列各通道观察数据的协方差矩阵,然后通过特征分解获得矩阵的大特征值及其对应的特征向量,从而构建白化矩阵。完成上述步骤后,再计算白化过程中的四阶累积量,得到一个酉矩阵,通过白化矩阵和酉矩阵就可估计出信号的导向矢量[12-13]。
设定X 为白化后的矢量阵N 通道观测矢量Z=[z1,z2,…,zN]T,M 为任意N ×N 矩阵。Z 的四维累积量矩阵Qz(M)的定义如下:

式中:Kijkl(Z)为矢量中的第i,j,k,l 四个分量的累积量;mkl为矩阵X 的第k,l 元素。
可以证明:以M 为权重构成的累积量阵Qz(M)可分解为[6]

式中:λ=k4(sm)为信源的峰度;M 为Qz(M)的特征矩;k4(sm)为其特征值。
由定义可知,Qz(M)是对称阵(Qij=Qji),可以表示成VΛ(M)VT形式。其中:

根据式(5),通过VTQz(M)V 将Qz(M)对角化得到酉矩阵V,进而就可以对单矢量水听器阵列观察数据做出辨识与分解。
3 多目标信号的声能流DOA 估计
综上所述,本文提出的单矢量水听器多目标分辨算法实现步骤如下:
第2 步 估计累积量矩阵Qz(M);
第3 步 联合对接化Qz(M),估计出酉矩阵;
4 仿真实验
4.1 实验一
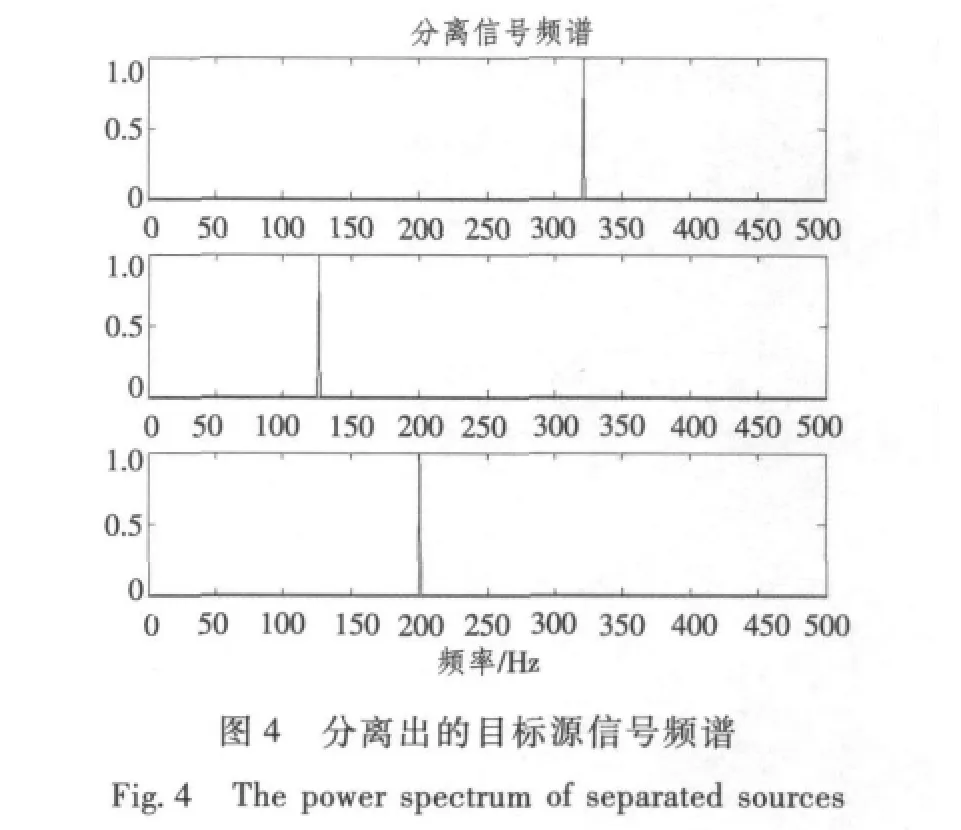
假设3 个远场声线谱信号入射至一矢量水听器,其频率分别为125Hz,200Hz,320Hz,入射角分别为(θ1=-30°,φ1=20°),(θ2=5°,φ2=45°),(θ3=40°,φ3=60°)。仿真条件为:信噪比SNR=10 dB,快拍数取2 000。结果如图1 ~图5所示。
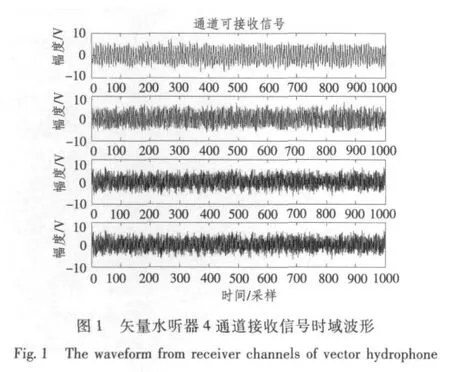
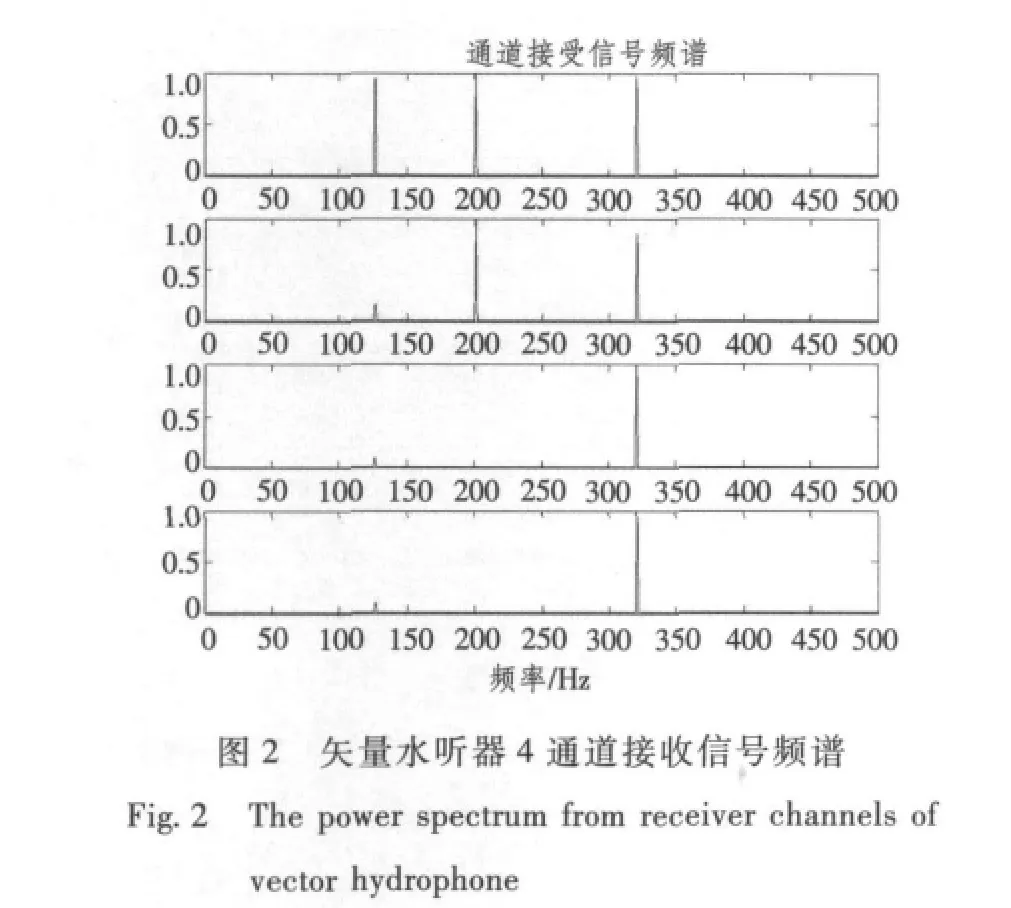
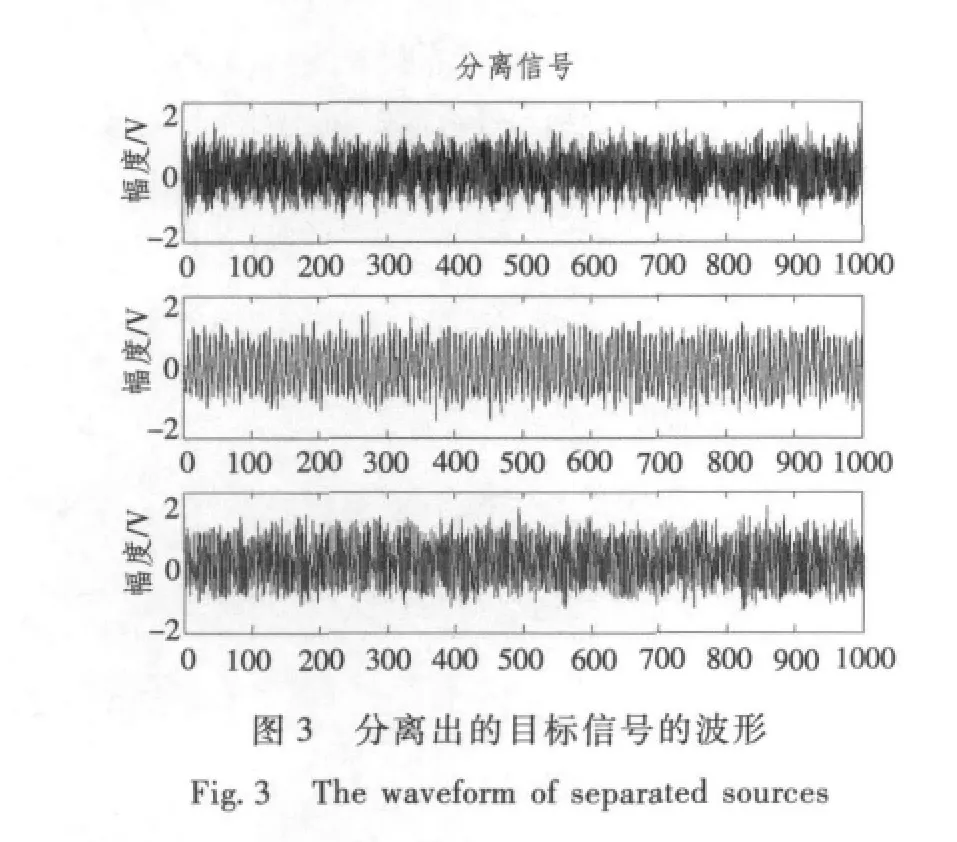
其中,图1 与图2 分别为矢量水听器4 通道接收到的混合信号的波形与频谱,图3 与图4 分别为通过JADE 算法分离出的各目标信号波形的波形与频谱。比较图2 与图4 可知,本文算法利用单个水听器可实现对多目标源信号的分离与频率估计。
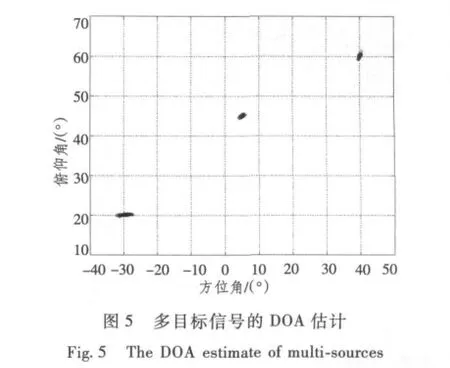
图5 为利用本文算法进行100 次Monte Carlo 仿真试验得到的多目标信号DOA 估计值,该图表明本文算法对多目标分辨的有效性。
4.2 实验二
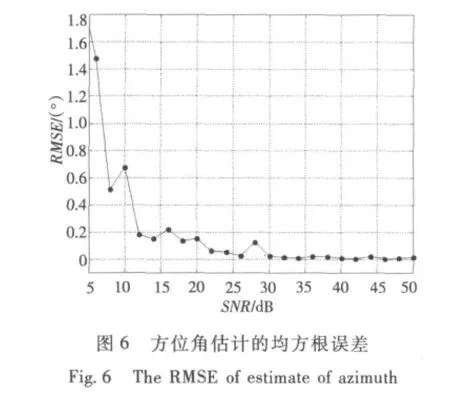
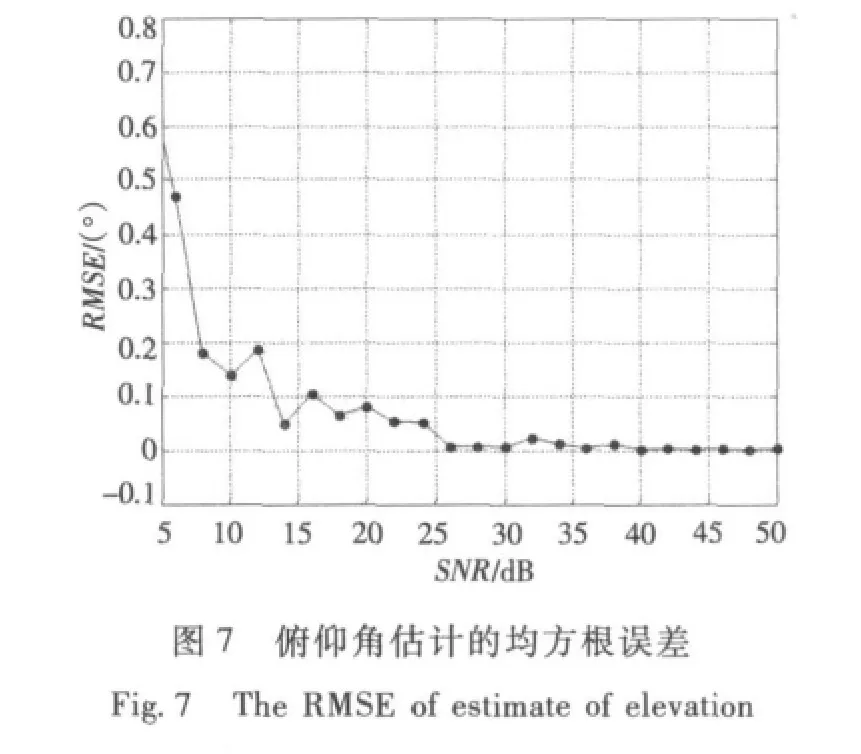
假设各目标信号的信噪比由SNR=5 dB 升至SNR=50 dB,其中每隔2 dB 进行一次目标信号的声能流DOA 估计,其他试验条件与实验一相同。
图6 与图7 分别给出了多目标方位角估计和俯仰角估计的均方根误差(RMSE)随信噪比变化的曲线,其中为目标估计方位,NO 为估计参数个数,取N=3。
5 结 语
本文将基于ICA 原理的JADE 算法与单矢量水听器技术相结合,提出了一种新的声能流多目标分辨算法。该算法应用于适合工程实现的单矢量水听器上,在信号方向矢量没有任何先验知识的情况下,可对单矢量水听器的阵列流型实现盲估计,并对混合信号进行分离,进而利用声能流逐次分辨出各个目标。
[1]杨德森,洪连进.矢量水听器原理及应用引论[M].北京:科学出版社,2009.
[2]杨士莪.单矢量传感器多目标分辨的一种方法[J].哈尔滨工程大学学报,2003,24(6):591-595.
YANG Shi-e.Method of multi_sources distinguishing by single vector transducer[J].Journal of Harbin Engineering University,2003,24(6):591-595.
[3]HYVRINEN A,OJA E.Independent component analysis:algorithms and applications[J].IEEE Neural Network,2000,13(4):411-430.
[4]MAKEIG S,BELL A J,SEJNOWSKI T J.Independent componentanalysis of elect roencephalographic data[J].Advances in Neural Information Processing Systems,1996(8):145-151.
[5]HYVRINEN A.Survey on independent component analysis[J].Neural Computing Surveys,1999(2):94-128.
[6]SZU H,NOEL S,YIM S,WILLEY J,LANDA J.Multimedia authenticity protection with ICA watermarking and digital bacteria vaccination[J].Neural Networks,2003,16(6):907-914.
[7]CARDOSO J F.High-order contrasts for independent component analysis[J].Neural Computation,1999,11(1):157-192.
[8]杨福生,洪波.独立分量分析的原理与应用[M].北京:清华大学出版社,2006.
[9]NEHORAI A,PALDI E.Acoustic vector-sensor array processing[J].IEEE Trans.on Signal Processing,1994,42:2481-2491.
[10]WONG K T,ZOLTOWSKI M D.Closed-form underwater acoustic direction-finding with arbitrarily spaced vector hydrophones at unknown locations[J].IEEE Journal of Oceanic Engineering,1997,22(4):649-658.
[11]梁国龙,张凯,付进.单矢量水听器的高分辨方位估计应用研究[J].兵工学报,2011,32(8):986-990.
LIANG Guo-long,ZHANG Kai,FU Jin.Research on highresolution direction-of-arrival estimation based on an acoustic vector-hydrophone[J].Acta ArmamentarⅡ,2011,32(8):986-990.
[12]马建仓,牛奕龙,陈海洋.盲信号处理[M].北京:国防工业出版社,2006.
[13]史习智.盲信号处理-理论与实践[M].上海:上海交通大学出版社,2008.
猜你喜欢
电声技术(2022年3期)2022-04-28
现代仪器与医疗(2022年1期)2022-04-19
野生动物学报(2021年1期)2021-01-13
合肥工业大学学报(自然科学版)(2020年11期)2020-12-05
热带农业科学(2020年7期)2020-08-31
煤矿安全(2020年4期)2020-04-24
环境与生活(2020年4期)2020-02-19
北京航空航天大学学报(2019年9期)2019-10-26
雷达学报(2017年3期)2018-01-19
舰船电子工程(2017年3期)2017-04-07