速度知觉测试软件的开发与应用
2013-11-30 05:02陈善广王春慧田志强
计算机工程与设计 2013年1期
田 雨,陈善广,王春慧,田志强,蒋 婷
(中国航天员科研训练中心 人因工程重点实验室,北京100094)
0 引 言
速度知觉是人的视觉感知与时间感知相结合的产物[1]。在汽车驾驶、体育运动等诸多领域中,参与者都需要对运动物体的速度进行知觉与估计。研究表明,速度知觉对驾驶安全、运动员表现都可能存在显著的影响[2-7]。速度知觉测试方法可分为主观测试、硬件仪器测试和软件测试3种。主观测试方法大都用在实际道路驾驶等场合中,硬件仪器测试与软件测试则主要用在实验室测量中。主观测试通过询问驾驶员的方式获得驾驶员对速度的估计,同时记录速度仪显示的速度真值,两者对照计算驾驶员速度估计偏差;硬件仪器测试与软件测试原理相似,都是在特定界面上呈现物体运动,要求受试者判定物体运动速度,并根据对速度的判定进行适当的反应[2-7]。在实验测量常用的两种方式中,在计算机上开展的软件测试相对于硬件仪器测试在灵活性、成本以及数据收集与处理等方面有着显著的优势,是速度知觉测试的发展方向[8]。
飞行器空间交会对接根据其控制方式可分为自控交会对接与人控交会对接两种。在国际上,美国较多采用的是人控交会对接,而苏联/俄罗斯则偏重于自控方式,未来发展趋势是两种控制方式相结合[8]。在载人航天器进行交会对接时,保留人工控制方式将可能发挥人思维决策能力强与灵活应变等优点,提高对接成功率。通过人控交会对接专家对任务的分析,人对电视图像中目标飞行器图像在屏幕中移动速度的知觉与估计有可能影响控制时间、燃料消耗等人控交会对接任务绩效。
鉴于当前速度知觉测试中软件测试方法应用较少,已有测试软件灵活性不足等问题,本文基于速度知觉测试心理学范式,利用C++语言,设计开发了一款灵活稳定的速度知觉测试软件。利用所设计开发的速度知觉软件,通过实验设计与分析,本文对速度知觉能力是否影响人控交会对接任务绩效这一问题进行了探讨。
1 速度知觉测试软件
1.1 功能设计
速度知觉软件测试大都基于遮挡范式而进行设计的[1,7]。通过计算机软件实现的遮挡范式一般在电脑屏幕上呈现物体的运动,物体运动方向、运动规律为事先设定,让受试者判断物体运动速度,并通过适当的方式进行反应。从实现上将,就是在测试开始时,在屏幕上出现一个运动物体,物体运动一段后消失后,受试者需想象物体以同样的规律运动,并在到达指定的目标终点或目标刻度线时进行按键操作,按键后物体重新出现作为反馈。为使得速度知觉测试具有稳定性、通用性和可重复性等特点,本研究中将测试界面背景设定为白色,运动物体设定为一个灰色的圆形光点,光点运动轨迹规定为直线运动;而将物体的运动方向、运动方式(匀速、匀变速)、运动起点、初始速度等参数设计为可调,使得测试软件在规范通用的同时具备足够的灵活性。
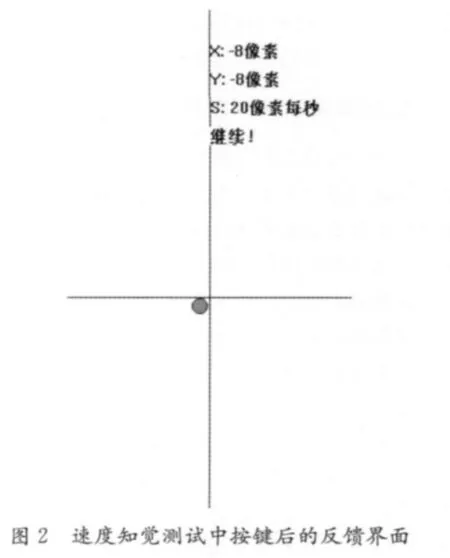
打开速度知觉测试软件即显示背景界面,白色背景界面上有两条相互垂直的灰色直线(将水平方向的直线记为X轴,竖直方向的直线记为Y轴),两直线的交点为界面中心(记为原点)。在载入参数后,点击开始键,将弹出测试者个人信息输入界面。在输入个人信息后测试开始,背景界面上将出现一个灰色的圆形光点(如图1所示)。圆形光点在界面上做直线运动,圆形光点运动时间t秒后消失(t可设置),受试者需想象物体与消失前以同样的规律运动,在估计光点到达目标点或目标刻线时按数字键0,受试者按下键后光点再次出现,界面上以数值的形式向受试者反馈距离线目标点或目标刻的位置偏差以及光点当前的运动速度(如图2所示)。
1.2 参数设置
为方便操作,软件参数列在一个文档中,供实验设计人员设置。可设置的参数包括全局变量参数和局部变量参数两种。全局变量参数包括一组连续的多次测试中相邻两组测试的间隔时间(一般设为1s到3s),以及光点从出现在屏幕起到自动消失的时间。局部变量包括其光点运动方向、光点初始横纵坐标位置、光点的初始速度以及加速度。其中光点运动方向有3种可选:从初始位置向原点运动,从初始位置向X轴运动(即竖直方向运动),从初始位置向Y轴运动(即水平方向运动)。光点初始横纵坐标位置可选在屏幕内的任意点,其单位为像素点。光点初始速度的单位为像素点/s;加速度的单位为像素点/s2,亦可进行设置。在实际设置中以上参数应配合设置才能达到测试目的。
1.3 速度知觉偏差计算
在速度知觉测试软件中通过如下数学模型来计算速度估计偏差指标。
(1)计算光点从初始位置运动到目标点或目标线所需要的时间,记为T0。对于光点做匀速直线运动的情况,T0=D0/V0,其中D0为光点初始位置到目标点或目标线的距离,V0为光点初始速度;对于匀加速或匀减速运动通过物理学方程V0T0+aV20/2=D0(满足V20+2aD0≥0时)反解得(出现的负根被舍弃)。
(2)记录从光点出现在屏幕上并开始运动到受试者按下键的时间,记为T1。
(3)计算时间偏差Terror,Terror=T0-T1。时间偏差大于零,表示受试者有低估运动速度的倾向,小于零则表示受试者有高估运动速度的倾向。
(4)计算时间偏差率Perror=Terror/(T0-Tconst),其中Tconst为光点从出现在屏幕上到自动从屏幕上消失的时间,该参数为事先设定的全局变量。
在一次测试中一般设置参数不同的多组测试,最后将这些组测试的偏差时间的绝对值进行平均或将其时间偏差率的绝对值进行平均即为得到受试者的速度知觉偏差指标。受试者速度估计偏差越小,其速度知觉能力越强。
2 速度知觉测试软件的应用
设计开发速度知觉测试软件的一个直接应用目的是探索速度知觉能力是否影响人控交会对接任务绩效。人控交会对接是一个较为复杂的人机交互任务,任务涉及到人的视知觉(包括运动感知)、表象加工、记忆、手动控制等诸多感知与认知要素。那么人的速度知觉在其中发挥了多大的作用,速度知觉能力是否显著地影响人控交会对接任务绩效呢?针对这一问题,本文开展了实验研究。
2.1 被 试
选取中国航天员科研训练中心16名科研工作者作为受试者。受试者全部为男性,右利手,矫正视力5.0以上。受试者年龄在27到42岁之间(年龄平均值为30.6,标准差为3.5)。
2.2 速度知觉测试实验
通过预实验发现光点做匀变速运动时人的速度知觉偏差在多次测试中波动较大;而光点做匀速运动时人的速度知觉偏差相对稳定,且不同人的知觉偏差有显著差异,即测试的稳定性与敏感性均表现良好。因此选择用不同方向、不同初始位置、不同初始速度的多组匀速直线运动模式来测量受试者的速度知觉能力。
通过文献调研、专家咨询与预实验测试,确定了如下一组参数来进行速度知觉测试:光点做匀速直线运动,运动的目标点均为原点。全部测试中运动方向共8个(如图3所示),每个方向进行三组测试,每组测试中的起点位置分为近距离点、中距离点、远距离点3种,初始速度分低速、中速与高速3种。光点在屏幕上从第一次出现开始运动到自动消失的时间为5s,相邻两组测试间隔2s。
在正式测试中,受试者首先阅读实验指导,明确实验规则与流程。然后打开速度知觉软件进行8组练习。之后进入设定的24组参数的测试,软件自动记录和保存测试结果。
2.3 模拟人控交会对接实验
基于地面人控交会对接模拟仿真平台[9],开展了模拟人控交会对接实验,获取了每名受试者10次交会对接实验绩效数据。
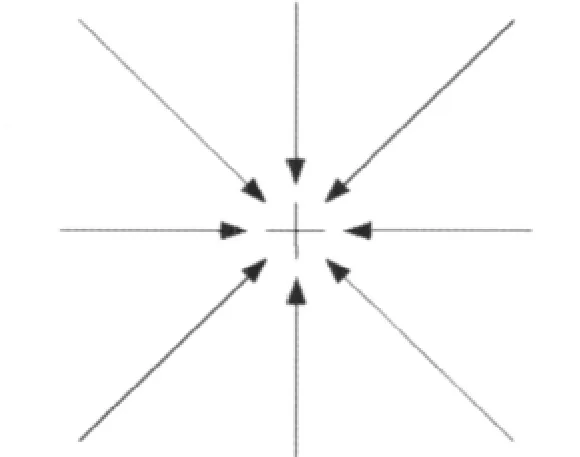
图3 速度知觉测试中设置的光点8个运动方向
在人控交会对接任务中,如果出现突发情况,飞船系统将可能无法提供或无法精确地提供两飞行器之间的相对运动参数信息。本研究中设计的模拟交会对接实验模拟的正是无参数信息显示,仅有视觉成像系统图像显示时的人控交会对接。在这种情况下受试者需要根据视觉成像系统显示的目标飞行器图像来感知和判断追踪飞行器与目标飞行器的相对位置与姿态偏差以及相对运动状态,并通过操纵控制手柄进行控制。受试者用一只手控制平移手柄,调节两飞船沿三轴六方向(上下,左右,前后)的相对位移偏差 ;用另一只手控制姿态手柄,调节两飞船的相对滚转(左右向旋转)、俯仰(前端上下)、偏航(向左右摆)角度偏差[11]。
为保证受试者掌握人控交会对接任务基本技能,对受试者进行了5个科目的培训,这些培训分为理论培训与实际对接练习与指导两类。理论培训中,交会对接任务专家向受试者介绍任务概况、控制原理、控制基本策略、任务要求、对接成功的标准等。实际对接练习在中国航天员科研训练中心交会对接模拟器上进行。受试者执行多种初始状态的对接练习,其中在两个科目的培训中受试者需要连续对接成功3次方能结束该科目的培训。5个科目的累积培训时间约6.25小时。正式试验中受试者的对接成功率平均超过0.9,说明培训是比较充分的。
在培训完成后一周内,受试者在模拟器内进行两组正式的对接任务测试,每组测试中受试者完成1次练习之后进行5次正式的模拟交会对接实验。10次对接实验任务难度水平相近。实验中软件系统自动记录受试者的控制时间、燃料消耗、对接精度等各类绩效数据。
2.4 速度知觉测试与人控交会对接绩效的关联
2.4.1 速度知觉能力指标
将速度知觉测试中测得的同一名受试者在24组正式测试中的时间偏差的绝对值进行平均得到其速度知觉能力指标,该指标越小,速度知觉能力越强。
2.4.2 人控交会对接任务绩效指标
基于Jiang等人对人控交会对接绩效指标体系的研究[10],构建出图4所示的指标体系来评价受试者的人控交会对接任务绩效。体系中顶层指标为对接精度绩效指标与对接过程绩效指标两大类;对接精度底层指标包括对接时刻的滚转角偏差、俯仰角偏差、偏航角角偏差以及平移偏差;对接过程底层指标包括对接全程的控制时间、燃料消耗、累积偏差(累积滚转角偏差、累积俯仰角偏差、累积偏航角偏差、累积平移偏差)。
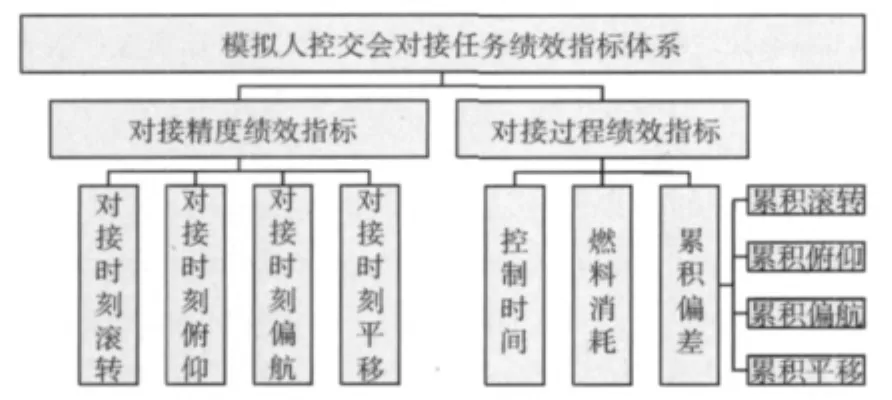
图4 模拟人控交会对接任务绩效指标体系
对选取的底层指标进行相关分析发现,累积平移偏差绩效指标与累积偏航偏差的相关性达到了0.81,与控制时间的相关性达到了0.65,且均具有统计学意义(P<0.05,n=160)。这表明该指标与其它指标的独立性较差,因此在绩效综合评价时予以剔除。剔除累积平移偏差这一指标后,任意两底层指标之间的相关性不超过0.6,本文从充分利用各类绩效数据的角度出发不再剔除其它绩效指标。
实验中,软件系统自动计算和记录指标体系中的底层指标(累积偏差通过对偏差的绝对值随时间积分而得)。指标综合时利用熵值法(entropy method)[11-12]对底层指标进行综合得到对接精度综合绩效指标与对接过程综合绩效指标。熵值法可以解决底层指标单位不一致无法直接综合的问题,且可以充分利用数据包含的信息来合理区分受试者综合绩效优劣。
2.4.3 相关分析
在进行相关分析前首先检验数据是否符合正态分布特征,通过SPSS 14.0中的K-S正态分布检验,受试者的速度知觉能力指标与人控交会对接任务各绩效指标均能通过正态分布检验,这说明两类测试都没有出现天花板效应或地板效应,这是相关分析的前提。接着计算了16名受试者的速度知觉能力指标与人控交会对接任务各类绩效指标的Pearson相关系数,见表1和表2。结果发现,受试者速度知觉能力指标与所有的对接绩效指标均呈正相关,其中与部分对接过程绩效指标的相关性达到了显著性水平。这表明速度知觉能力可能显著地影响着人控交会对接过程绩效。虽然,速度知觉能力指标与所有对接精度绩效指标的相关性均未达到显著水平,但正相关的趋势表明速度知觉能力也极有可能影响着人控交会对接任务的对接精度。

表1 速度知觉与人控交会对接绩效的相关系数

表2 速度知觉与人控交会对接精度的相关系数
3 讨 论
在正式测试中,16人速度知觉测试结果能通过K-S正态分布检验,测试数据符合正态分布特征。这表明速度知觉测试具有良好的敏感性,可有效区分人的速度知觉能力。
速度知觉能力指标与人控交会对接任务部分绩效表现出了显著的相关性,这表明速度知觉能力在人控交会对接任务中很可能发挥着重要作用。
速度知觉能力与人控交会对接任务部分过程绩效表现出了显著的相关性,而与所有对接精度绩效指标没有表现出显著的相关性。这可能是两方面原因造成的:①在对接末段,两飞行器相对运动速度往往被控制得非常小,此时影响对接精度的主要是末段之前的控制好坏以及最终的精细调节能力,速度知觉对精度影响可能较小;②对接末段受试者对精度追求上有分化。这种分化及由此导致的末段控制策略的差别可能直接影响其对接精度,而末段控制策略对全过程的控制时间、累积偏差等过程指标影响较小。也就是说对接精度可能不仅受人的速度知觉等认知能力的影响,还受到控制策略、主观自我要求等因素影响。
4 结束语
本文介绍了一款速度知觉软件的设计开发及应用实例。通过软件来测量速度知觉等认知能力的方法具有灵活性好、成本低等优势,是目前基本认知能力测量的发展趋势。
在人的认知能力测试中,由于人与人的个体差异,以及人的状态起伏,反复多次测试必不可少。在进行参数设置等前期准备中,专家意见以及一定量的预实验十分必要。
人的基本认知能力测试可广泛应用在人员选拔与针对性培训中,对于降低认知失误风险,提高任务成功率与可靠性意义重大。
[1]WANG Changsheng,LIU Ge,FU Quan,et al.The status quo and prospect of the research on sports time perception[J].Journal of Beijing Sport University,2007,30(6):777-780(in Chinese).[王长生,刘革,付全,等.运动时间知觉研究现状及其展望[J].北京体育大学学报,2007,30(6):777-780.]
[2]PAN Wenxian.Analysis of the driver’s safety reliability[J].Industrial Safety and Environmental Protection,2010,36(3):56-58(in Chinese).[潘文献.驾驶员安全可靠度分析[J].工业安全与环保,2010,36(3):56-58.]
[3]JIANG Ji.The comparative analysis of athletes motion perception ability between cyclical and non-cyclical movement[J].Journal of Jilin Institute of Physical Education,2011,27(3):106-109(in Chinese).[蒋吉.周期与非周期性项目运动员运动知觉能力的比较研究[J].吉林体育学院学报,2011,27(3):106-109.]
[4]JIANG Nannan,XU Zhaohui,YU Hao,et al.Study on seaferers’speed estimation[J].Chinese Journal of Nautical Medicine and Hyperbaric Medicine,2006,13(1):18-20(in Chinese).[江楠楠,许朝晖,余浩,等.海员的速度估计研究[J].中华航海医学与高气压医学杂志,2006,13(1):18-20.]
[5]LI Dan.Development of a speed perception equipment based on the wireless communication technics[D].Tianjin:Tianjin Normal University,2009:1-40(in Chinese).[李丹.基于无线通讯技术的速度知觉测试仪的研究与实现[D].天津:天津师范大学,2009:1-40.]
[6]LIAO Minxin.The study on the special psychological characteristics of equestrian athlete[D].Wuhan:Central China Normal University,2009:15-20(in Chinese).[廖敏新.马术运动员专项心理特征研究[D].武汉:华中师范大学,2009:15-20.]
[7]HUANG Duan,ZHANG Kan.A research on the influential factors of time-to-collision estimation[J].Psychological Science,2008,31(6):1284-1286(in Chinese).[黄端,张侃.碰撞时间估计的影响因素研究[J].心理科学,2008,31(6):1284-1286.]
[8]YANG Jin,JIANG Guohua,CHAO Jiangang.A cross drone image-based manual con-trol rendezvous and docking method[J].Journal of Astronautics,2010,31(5):1398-1404(in Chinese).[杨进,姜国华,晁建刚.基于靶标图像的航天员手控交会对接方法[J].宇航学报,2010,31(5):1398-1404.]
[9]WANG Baozhi,JIANG Guohua,CHAO Jiangang,et al.Design and implement of manned rendezvous and docking ergonomics experimental system[J].Space Medicine & Medical Engineering,2011,24(1):30-35(in Chinese).[王宝智,姜国华,晁建刚,等.交会对接手控工效实验系统设计与实现[J].航天医学与医学工程,2011,24(1):30-35.]
[10]Jiang T,Wang C H,Tian Z Q,et al.Study on synthetic evaluation of human performance in manually controlled spacecraft rendezvous and docking tasks[C]//Orlando,USA:Digital Human Modeling-Third International Conference,2011.
[11]Zou Z H,Yun Y,Sun J N.Entropy method for determination of weight of evaluating indicators in fuzzy synthetic evaluation for water quality assessment[J].Journal of Environmental Sciences,2006,18(5):1020-1023.
[12]Liu P,Zhang X.Research on the supplier selection of a supply chain based on entropy weight and improved ELECTRE-III method[J].International Journal of Production Research,2011,49(3):637-646.
猜你喜欢
学生天地(2020年6期)2020-08-25
当代水产(2019年1期)2019-05-16
太空探索(2016年9期)2016-07-12
创业家(2015年1期)2015-02-27
中国新技术新产品(2014年6期)2014-03-25
空间控制技术与应用(2010年5期)2010-12-23
空间控制技术与应用(2010年3期)2010-12-23
中国校外教育(上旬)(2009年1期)2009-02-07
中学生博览(2009年8期)2009-01-14
故事作文·低年级(2009年12期)2009-01-07