基于高斯模型和卡尔曼预测的检测与跟踪
2013-11-30 05:01胡学刚刘忠振
计算机工程与设计 2013年1期
胡学刚,刘忠振
(1.重庆邮电大学 计算机科学与技术学院,重庆400065;2.重庆邮电大学 系统理论及其应用研究中心,重庆400065)
0 引 言
运动目标检测与跟踪的研究是计算机视觉领域中一个重要的研究领域,广泛应用于智能交通系统[1-2]、安防监控[3-4]、微生物研究[5-6]和飞行导航[7-8]等许多方面。
复杂的背景和目标不规律的运动通常是造成运动目标检测与跟踪困难的主要因素[9]。近年来,不少学者对该问题展开了深入的研究,并提出了一些不错的检测与跟踪方法[10-12]。然而,对运动目标进行检测与跟踪结果仍不理想。在目前的方法中,姚凤会等等首先利用光流法来检测出运动目标,然后结合卡尔曼滤波预测和颜色特征匹配两种方法可实现对运动目标的跟踪[13]。但这种方法容易受到噪声等的干扰,例如当图像中背景较复杂或者目标较模糊时,不仅处理速度低,跟踪效果也不好。Rowe等利用混合高斯模型背景建模法检测运动目标,并通过卡尔曼滤波,使用运动目标的颜色直方图和形状模型进行匹配判断达到跟踪的目的[14]。由于该方法的跟踪参数是固定值,因此不能进行及时有效的更新,使得跟踪的稳定性较差,进而影响到后续的跟踪准确性。Blanding等使用极大似然概率数据关联来跟踪目标,能够在可视性较差的情况下完成跟踪工作[15],但是该方法跟踪的准确性还有待进一步的提高。Pan等利用粒子滤波进行视频中运动目标的跟踪,算法具有很强的稳定性,并且对于单目标的跟踪效果良好[16-17],但是对于多目标跟踪的精确性方面效果有些差强人意。
针对运动目标检测与跟踪算法较难同时保证准确性和稳定性的问题,本文提出了一种有效的方法。首先在高斯背景建模中,采用了分块拼接的方式来初始化背景模型,并且利用动态权值完成背景自适应更新,使得背景模型能够持续有效,再采用背景差分法检测出运动目标。在目标跟踪中,将检测到的运动目标区域和质心位置信息作为Kalman预测的状态信息,结合其他相关参数完成运动目标的预测跟踪,并且对观测噪声矩阵进行自适应取值,使得跟踪的稳定性得到加强。
1 改进的运动目标检测算法
背景差分法是运动目标检测中使用最广泛的一种方法。该方法能够完整的检测出运动目标,且算法简单、快速。不过,此种方法的检测效果与提取的背景质量成正比。因此,背景的生成成为该方法最关键的步骤。背景的生成分为两部分:背景的初始化和背景的更新。一般来说,背景的更新是小范围的,背景的初始化至关重要。
本文针对背景的初始化,在非相邻二次帧间差分法的基础上,采用背景区域拼接的方式,从而得到一个相对理想的初始化背景。然后通过对图像中每个像素点进行高斯建模,从而完成背景随时间的更新过程,保证背景的持续有效。由于目标在运动的过程中相邻几帧之间经常会发生过多的交集,所以在二次帧差法做辅助进行背景初始化的过程中使用的是非相邻二次帧差法,如1、6、11帧图像。
选取阈值T1,通过二次帧差法检测出第6帧图像中的运动目标二值图像,接着利用数学形态学方法对所得图像进行补充孔洞,然后通过邻域滤波法对所得二值图像进行处理从而消除孤立点噪声,用0.5作为阈值来得到一个处理后的二值图像。这个二值图像可以粗略的表示为运动目标所在的位置,为后续工作中的背景提取作铺垫。
对此时二值图像中的各个区域进行标志,并且按区域面积从大到小进行排序。选取区域面积大于100的区域,其他的小区域舍弃。对于剩下的区域匹配出一个矩形框,且此矩形框比所在区域的最小矩形框稍大一些,以此来保证运动目标被包含在此矩形框中,且本文中选取1.1作为长和宽放大系数。
对视频第6帧中选取的矩形区域进行挖空处理,然后使用其他帧中的相对应区域进行背景的拼接。这样保证静态背景初始化的良好,从而使得提取的背景在差分中的精确性。
以上便完成了背景的初始化工作,下面将对背景进行高斯建模并完成持续有效的更新。
为了提高算法效率,降低时间复杂度,本文在对背景建模的时候先对视频图像序列转化为灰度图像,即图像中每个像素点的值从3维变成1维,以减少后续的计算量。此时,视频图像中每个点(x,y)的像素灰度值看作独立的高斯分布,即

其中μ(x,y)和是σ(x,y)分别是(x,y)位置灰度值的均值和标准差,通过视频前N帧序列初始化高斯模型,μ(x,y)和方差σ2(x,y)的初始值为
这里Ii(x,y)是第i帧图像在点(x,y)处的灰度值。因为前面已经通过区域拼接实现了背景模型的初始化,所以高斯模型中的μN(x,y)不作为初始化背景的数据,只作为背景更新的初始数据。在整个算法过程中,高斯模型的主要作用是实现背景更新。
现在来考虑背景模型的更新。首先设置一个控制更新幅度值T2为初始更新阈值,使得图像分为两个区域:背景更新区域和非更新区域。注意此处的非更新区域和前景区域不对等,且非更新区域包含前景区域。设1表示该像素点需要进行背景更新,0表示不需要进行背景更新,Ki(x,y)为背景更新区域二值掩模图。即

且

在背景更新过程中,作为背景学习率的权值α控制着更新的幅度。一般而言,α值经常取为固定常数。为保证更新的自适应性,这里采用动态权值α进行更新,且与高斯分布中的概率ρ相关。根据高斯分布,得出第i帧图像在点(x,y)处灰度值的概率,即

且背景动态学习率设为α为

通过式(5)-式(7)可以得出,若更新区域像素点概率越小则更新作用越大,否则越小。利用背景差分阈值T3来检测出背景区域,即

式(4)和式(8)中T2、T3分别是低、高阈值,使得灰度值在两者之间的像素值不参与背景模型的更新,从而获得更可靠的背景更新。
2 改进的运动目标跟踪算法
Kalman滤波器是一种线性递归滤波器,基于系统以前的状态序列对下一个状态做最优估计,预测时具有无偏、稳定和最优的特点。Kalman滤波的状态预测方程定义为
X(k|k-1)=AX(k-1|k-1)+BU(k)(9)式中:X(k|k-1)——通过k-1时刻状态值来对k状态的预测值,X(k-1|k-1)——k-1时刻最优估计状态值,U(k)——k时刻的控制量,A——状态转移矩阵。这里,状态转移矩阵A为
式中:t——现在状态与上一状态间的时间间隔数,且定义相邻两帧间的时间间隔为1。
用P(k|k-1)来表示与预测值X(k|k-1)相对应的误差协方差,即

根据k时刻的测量值和预测值,得出k时刻的最优估计值为

式(12)中H为观测矩阵,其值可以设为

Kg为卡尔曼滤波增益(Kalman Gain)

式(14)中R为观测噪声协方差,且误差协方差矩阵初始值P(0)可以设为
最后对k时刻与X(k|k)对应的误差协方差进行更新

在实际的运动目标跟踪中,因为存在着场景光暗变化等干扰因素,所以运动目标检测算法的精度不可能恒定不变,即实际的观测噪声是不断变化的,也就是说在Kalman滤波预测过程中,观测噪声协方差不是一个固定值。因此,如果在预测过程中依然使用固定的观测噪声协方差矩阵R是不合理的,将使得跟踪效果误差增加。本文受文献[18]启发,为了能够保证跟踪效果的更加精确,提出一种观测噪声协方差矩阵R自适应的算法。
在本实验室中,最后所得最优估计信息为运动目标的形心坐标。基本过程为:首先通过检测来得到目标形心坐标,然后通过Kalman滤波得到形心坐标预测值,最后根据预测所得的预测值和检测所得的状态值来获得最优估计值,从而完成运动目标跟踪。
由于在运动目标检测与跟踪中,可以近似的认为系统噪声协方差Q是恒定值,那么跟踪误差的主要原因便是观测噪声协方差R。通过对状态转移矩阵A中t值的两次不同选取,利用两次Kalman滤波得到目标形心坐标的两个最优估计值,分别记作X1(k|k)和X2(k|k)。为了判断当前观测噪声协方差R的估计是否精确,设定一对上下门限high和low。如果|X1(k|k)-X2(k|k)|>high,即两个最优估计值之差大于上门限时,则认为观测噪声估计偏高,需要增加观测值的可靠性,取R=λ1R,其中0<λ1<1;如果|X1(k|k)-X2(k|k)|<low,即两个最优估计值之差小于下门限时,则认为观测值的可靠性降低,需要提高观测噪声协方差,取R=λ2R,其中λ2>1。其他情况下,当low<|X1(k|k)-X2(k|k)|<high时,则R的值保持不变。即
3 实验结果与分析
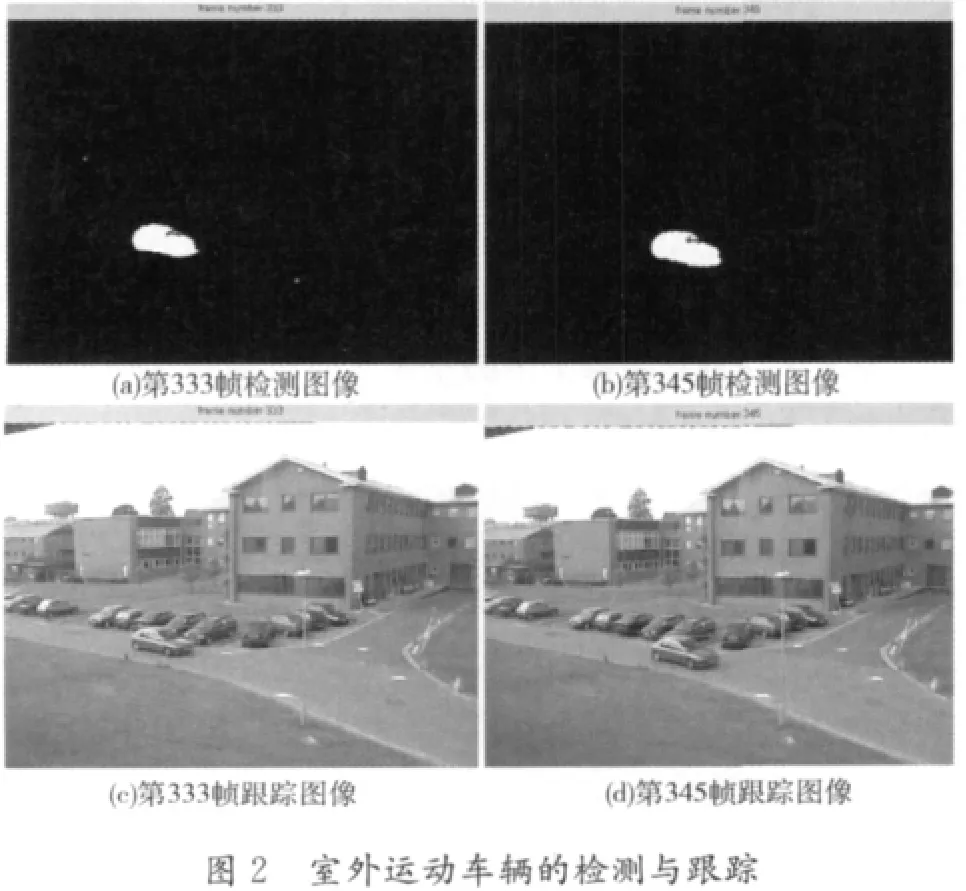
本文采用静止摄像头下的室内人体运动和室外车辆运动视频图像进行实验,其中实验参数设定为:T1=20,T2=15,T3=40,high=1,low=0.001,λ1=0.5,λ2=1.5。实验结果如下图所示。
图1为室内运动人体的检测与跟踪图。其中(a)和(b)分别为第16帧、25帧经过背景差分后的二值图像,可以看出目标检测较为完整且稳定有效;(c)和(d)分别为第16帧、25帧通过Kalman滤波器的目标跟踪图,可以看出目标跟踪较为准确且稳定有效,其中绿色 “+”为目标质心的最优估计位置。图2为室外运动车辆的检测与跟踪图。其中(a)和(b)分别为第333帧、345帧经过背景差分后的二值图像,(c)和(d)分别为第333帧、345帧通过Kalman滤波器的目标跟踪图,可以看出效果同样良好。图1属于室内非刚体运动,其目标形状时刻变化且阴影、反射等干扰较大;图2属于室外刚体运动,其目标形状基本不变且光线、树枝抖动等干扰较大。通过图像结果可以看出:在这两种情况下,本文算法具有较好的抗噪声性能,都能够完成准确、稳定的检测和跟踪。
4 结束语
本文提出了基于高斯模型和卡尔曼预测的检测与跟踪算法:利用背景区域拼接和非相邻帧二次差分来获得初始背景,加强了背景初始化的准确性;依据每个像素点建立高斯模型,对背景进行持续有效的更新,从而保证目标检测的持续有效;在目标跟踪中,引入Kalman预测方法,结合目标检测获得一个良好的跟踪效果。本文算法能够快速有效地检测出运动目标,并且在跟踪方面取得良好的效果。
[1]WANG Wei,YAO Minghai.Intelligent transportation monitoring system based on computer vision[J].Journal of Zhejiang University of Technology,2010,38(5):574-579(in Chinese).[王为,姚明海.基于计算机视觉的智能交通监控系统[J].浙江工业大学学报,2010,38(5):574-579.]
[2]XU Yang,WU Chengdong,CHEN Dongyue.Survey of videobased image traffic automatic incident detection algorithm[J].Application Research of Computers,2011,28(4):1206-1210(in Chinese).[徐杨,吴成东,陈东岳.基于视频图像的交通事件自动检测算法综述[J].计算机应用研究,2011,28(4):1206-1210.]
[3]TANG Yiping,HE Zuling,JIN Ye,et al.ATM intelligent surveillance based on ODVS[J].Journal of Zhejiang University of Technology,2010,38(1):26-32(in Chinese).[汤一平,何祖灵,金冶,等.基于全方位计算机视觉的ATM机智能监控[J].浙江工业大学学报,2010,38(1):26-32.]
[4]TANG Yiping,HU Feihu.Theft detection based on omni-directional vision sensors[J].Journal of Computer Applications,2010,30(1):36-40(in Chinese).[汤一平,胡飞虎.基于全方位计算机视觉的盗窃事件检测[J].计算机应用,2010,30(1):36-40.]
[5]GE Yun,ZHANG Dong.Automated methods for particle tracking of the intracellular transport of clathrin-coated pits and vesicles[J].Journal of Southeast University(Natural Science Edition),2009,39(3):464-467(in Chinese).[葛云,章东.活体细胞图像斑点的自动提取和跟踪方法[J].东南大学学报:自然科学版,2009,39(3):464-467.]
[6]CHEN Yuan,ZHAO Zhimin,LIU Lei.Automatic tracking and measurement of blood cells motion in microcirculation based on ST image[J].Journal of Southeast University(Natural Science Edition),2011,41(1):72-76(in Chinese).[陈远,赵志敏,刘磊.基于ST图的微循环血细胞自动跟踪与测量技术[J].东南大学学报:自然科学版,2011,41(1):72-76.]
[7]CUI Hao,CHEN Xiaotian,YANG Weiping,et al.Passive tracking of maneuvering target with image aiding[J].Infrared and Laser Engineering,2011,40(8):1594-1600(in Chinese).[崔颢,陈晓天,杨卫平,等.图像辅助的机动目标被动跟踪[J].红外与激光工程,2011,40(8):1594-1600.]
[8]HUANG Changzhuan,WANG Biao,YANG Zhong.Fast pose estimation method for flight vehicles based on computer vision[J].Computer Measurement & Control,2009,17(7):1378-1380(in Chinese).[黄长专,王彪,杨忠.基于计算机视觉的飞行器姿态快速估计方法[J].计算机测量与控制,2009,17(7):1378-1380.]
[9]XIAO Guoqiang,KANG Qin,JIANG Jianmin,et al.Tracking video object based on central macroblocks[J].Chinese Journal of Computers,2011,34(9):1712-1718(in Chinese).[肖国强,康勤,江健民,等.基于中心宏块的视频目标跟踪算法[J].计算机学报,2011,34(9):1712-1718.]
[10]Subudhi B N,Nanda P K,Ghosh A.A change information based fast algorithm for video object detection and tracking[J].IEEE Transactions on Circuits and Systems for Video Technology,2011,21(7):993-1004.
[11]Jazayeri A,Hongyuan Cai,Jiang Yu Zheng.Vehicle detection and tracking in car video based on motion model[J].IEEE Transactions on Intelligent Transportation Systems,2011,12(2):583-595.
[12]ZHENG Kebiao,HUANG Wenqing,ZHANG Zuoli,et al.Occlusion handling in moving object tracking system[J].Computer Engineering and Design,2009,30(11):2816-2818(in Chinese).[郑可飚,黄文清,张佐理,等.运动目标跟踪系统的遮挡问题处理[J].计算机工程与设计,2009,30(11):2816-2818.]
[13]Yao Fenghui,Sekmen A,Malkani M J.Multiple moving target detection,tracking,and recognition from a moving observer[C]//New York:Proceedings of the IEEE International Conference on Information and Automation,2008:978-983.
[14]Rowe D,Reid I,Gonzalez J,et al.Unconstrained multiplepeople tracking[C]//Proceedings of the 28th DAGM Symposium.Berlin:Springer,2006:505-514.
[15]Blanding W R,Willett P K,Bar-Shalom Y.Multiple target tracking using maximum likelihood probabilistic data associa-tion[C]//Proceedings of IEEE Aerospace Conference.Big Sky,2007:1-12.
[16]Pan P,Schonfeld D.Dynamic proposal variance and optimal particle allocation in particle filtering for video tracking[J].IEEE Transactions on Circuits and Systems for Video Technology,2008,18(9):1268-1279.
[17]Angelova D,Mihaylova L.Extended object tracking using monte carlo methods[J].IEEE Transactions on Signal Processing,2008,56(2):825-832.
[18]WANG Xianghua,QIN Zheng,YANG Xinyu,et al.Adaptive algorithm for adjusting observation noises based on double-Kalman filter[J].Systems Engineering and Electro-nics,2010,32(2):232-234(in Chinese).[王向华,覃征,杨新宇,等.基于两次Kalman滤波的观测噪声自适应调整算法[J].系统工程与电子技术,2010,32(2):232-234.]
猜你喜欢
汽车工程师(2021年12期)2022-01-17
当代陕西(2020年14期)2021-01-08
奥秘(创新大赛)(2020年7期)2020-07-27
计算机应用与软件(2019年2期)2019-04-01
军事文摘(2018年24期)2018-12-26
雷达学报(2017年3期)2018-01-19
中国化妆品(2017年12期)2017-06-27
考试周刊(2016年54期)2016-07-18
太空探索(2016年7期)2016-07-10
自动化学报(2016年8期)2016-04-16