
激光扫描技术在铁路限界检测中的应用研究
2013-11-27 03:19段培勇谢锦妹
铁道建筑 2013年8期
段培勇,薛 峰,谢锦妹,潘 振,金 花
(中国铁道科学研究院铁道建筑研究所,北京 100081)
铁路建筑限界是一个垂直于线路中心线的横断面,在此断面内,除机车车辆和与机车车辆作业相关的设备(车辆减速器,路签授受器,接触电线及其他)外,其他设备或建筑物均不得侵入[1]。限界检查是对线路周边建筑和设施进行检测,以确定是否存在侵限。本文结合联调联试试验,以大量的测试数据为基础,对2D激光扫描技术在铁路限界检测领域的使用进行了深入研究。
1 2D激光扫描限界检测技术
目前铁路限界检测主要是采用限界轨道检测车和人工定点测量相结合的方式进行[2]。限界检测车的主体为固定安装在平板车上的限界框架,由内燃机车牵引,对全线逐段进行检测[3],人工定点测量主要在限界检测车不能检测时采用,一般使用水平尺、卷尺、吊锤、经纬仪等工具进行测量。其中,限界检测车上的框架必须根据不同的限界标准断面制作为可伸缩的,检测过程中根据线路限界标准的变化实时调整限界框架的大小,这就造成了限界检测的不连续性;人工定点测量方式存在着测量精度低、速度慢、工作量大、效率低等缺陷;且上述传统限界检测方式的局限性决定了其测量结果并不能详尽描述整条线路的净空状态。
基于2D激光扫描技术的车载式铁路限界检查测试系统提供了一种安装简单、自动化程度高、检测范围全面、测试精度高的限界检测方法,克服了原有检测方法存在的缺陷。
1.1 检测原理
限界检测系统利用2D激光扫描传感器来实时获取线路横断面的轮廓,同时利用速度传感器获取车辆在前进方向移动的距离,从而实现对铁路限界的高速检测。
2D激光扫描传感器是基于激光漫反射原理进行目标物体距离测量的[4];首先,传感器内置的旋转镜头在高速旋转过程中对目标物体发射激光脉冲,经目标物体反射后激光向各方向散射。部分散射光返回到传感器接收器,记录并处理从光脉冲发出到返回被接收所经历的时间,即可测定传感器扫描中心距目标物体的距离。
2D激光扫描传感器将扫描的断面数据实时传输至计算机,检测软件对接收到的断面数据进行分析处理,根据钢轨特征识别出钢轨坐标位置后,将断面数据自动转换为以钢轨顶面连线中点为原点,以钢轨顶面连线为X轴,以垂直于钢轨顶面连线为Y轴的线路横断面数据。
速度传感器发出的脉冲信息经过里程记录模块转码为速度、里程信息,传输至计算机,检测软件将接收到的里程信息同步至激光扫描断面数据;至此,铁路线路周围的实际建筑物体轮廓便可以三维立体图像方式再现出来。
1.2 检测系统的组成
基于2D激光扫描技术的车载式铁路限界检查测试系统由2D激光扫描传感器、速度传感器、里程模块、处理主机、供电模块等组成,系统结构如图1所示。
1.3 检测系统的安装
在轨道车车头的车钩前端安装2D激光扫描传感器,如图2所示。传感器安装支架保证了2D激光扫描传感器的扫描断面垂直于轨道,且轨道车自身部件不会对传感器测量形成遮挡。

图1 限界检查测试系统结构

图2 2D激光扫描传感器安装实例
2 检测数据分析方法
限界检测软件采用Visual C++编制,使用通用网络协议实时接收2D激光扫描传感器扫描断面数据;使用串口协议实时接收速度传感器产生的脉冲信号,转码为速度里程信息,同步至扫描断面信息。在处理主机硬件配置满足要求的前提下,检测软件可以实现扫描断面数据的实时存储、分析处理以及实时展示。
2.1 断面数据的坐标系转换
铁路限界标准是一个以钢轨顶面连线中点为原点、以钢轨顶面连线为X轴、以垂直于钢轨顶面连线为Y轴的直角坐标系中的封闭曲线,而2D激光扫描传感器的原始扫描数据是以激光传感器的扫描中心点为原点的断面数据,为了判断断面数据是否侵入限界标准,首要的工作是对原始断面数据进行坐标系转换。
如图3所示,设原始断面数据以{O;X,Y}为直角坐标系,根据钢轨断面几何特征识别出轨面顶点和轨距点后,得出轨道中心点的坐标为O'(a,b),根据直角坐标系平移变换公式,将直角坐标系{O;X,Y}变换为{O';X',Y'}。考虑到检测过程中轨道车车体侧滚的影响,轨面顶点连线和X'轴可能存在一定的角度θ,根据直角坐标系旋转变换公式,将直角坐标系{O';X',Y'}变换为{O';X″,Y″}。
2.2 散点过滤
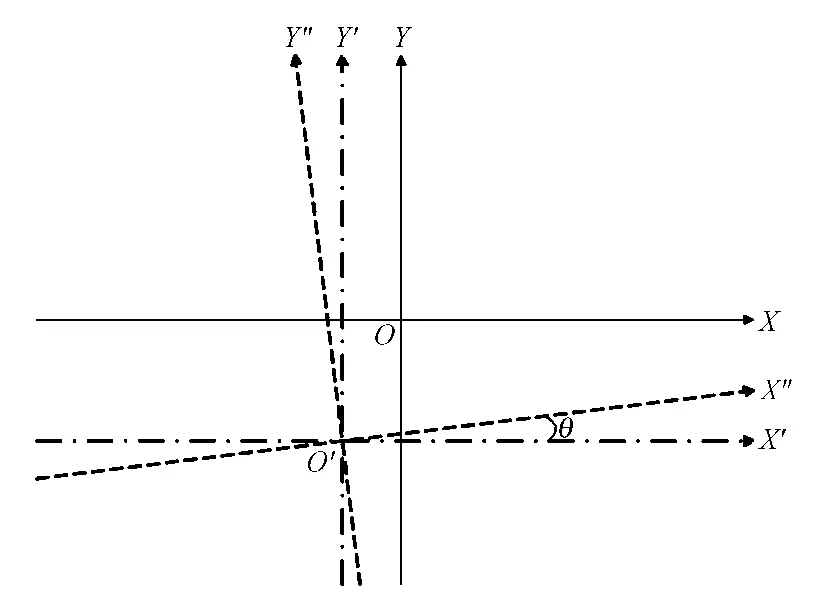
图3 坐标系转换示意
在测试过程中,当遇到金属体反光、风沙扬尘等现象时,激光扫描传感器可能会产生无规律的、离散的扫描点,称之为散点。这种散点处于限界标准内,如果把此类型的散点判断为侵限点,将对最终结果造成较大的偏差;由于这种散点和其他扫描数据存在较大的偏差,限界检测程序采用中值滤波算法[5],将连续采样的奇数个数据进行排序,取中间值为滤波后的数据,能很好地过滤掉散点干扰,降低了散点对检测结果造成的偏差。
2.3 判断是否侵限
判断某个断面数据是否存在侵限,等同于判断此断面中有没有扫描点处于限界标准内。由于铁路限界标准是一个封闭的曲线,可以将判断是否侵限抽象为“点是否在多边形内”。限界检测程序采用水平射线算法[6-7],求解通过该点的水平线与多边形各边的交点个数,如果单边交点为奇数,则该点处于多边形内;如果单边交点为偶数,则该点处于多边形外。对于点在多边形边上以及通过点的射线与多边形顶点相交的情况,需要进行特殊处理。图4中展示了一个不规则的多边形以及A、B两个点,根据上述算法思想,通过A、B两点,各画出一条单方向的水平射线。其中,通过A的射线与多边形各边有3个交点,为奇数,则点A处于多边形内;通过B的射线与多边形各边有2个交点,为偶数,则点B处于多边形外。图5展示了射线判别法的算法流程。

图4 射线判别法示意

图5 射线判别法流程
通过计算,限界检测程序将断面数据各个扫描点进行侵限判断,如果扫描点处于限界标准内,则视之为侵限点,并得出扫描点距限界标准的水平距离,即侵限值。
2.4 统计侵限信息
限界检测程序在实时获取激光扫描断面数据的同时,也在实时获取里程信息,使得每个断面数据均配有精确的里程信息。根据里程信息可以统计出某一段距离内(如每1 m内)各个断面数据是否存在侵限,如有侵限,则可以得出此段距离内的最大侵限值以及侵限点的坐标位置。
2.5 实时展示

图6 限界检测程序实时展示界面
在处理主机CPU运算能力满足要求的情况下,限界检测程序在实时接收、分析判断的基础上,可以实现断面数据的实时展示。图6展示了限界检测程序的工作界面,其中左侧图像为断面数据的2D展示,封闭曲线为限界标准,线条为断面数据的各个扫描点,处于限界标准内的视为侵限点;右侧立体图像为某段距离内断面数据的3D展示,黑色区域即为侵入限界标准的物体轮廓。两种展示图像相结合,可以清晰地获得被测区间的限界状态。
3 某轻轨铁路限界检查关键技术的实现
3.1 限界标准的自动转换与里程标定
某轻轨铁路联调联试限界检测所依据的限界评判标准是测试结果能否正确指导工程验收的关键所在。轻轨铁路正线长度为18 km,其中包括直线段以及多种曲线半径的曲线段,设计单位为直线段和各个曲线段提供了各自对应的限界评判标准;为了确保测试过程的连续性,限界检测程序必须做到根据里程信息自动切换限界评判标准。因此,实际检测工作中要确保里程信息的准确度。
车载式限界检测系统采用光电式速度传感器来获取里程信息,为了降低里程信息的误差,必须获得轨道车的实际轮径值,标定公式为D=L×D1/L1,其中,D为轨道车的实际轮径值,L为轨道车行驶的实际距离,D1为轨道车的出厂轮径值,现场轨道车出厂轮径值为840 mm,L1为以出厂轮径值为参数,限界检测程序得出的行驶距离。
3.2 缓和曲线段限界标准的自动生成
某轻轨铁路两个车站内各有长度为40 m的缓和曲线段,由于设计单位并没有提供缓和曲线段的限界评判标准,实际检测过程中出现了一个问题:如果采用曲线段的限界标准评判缓和曲线段,会出现一定的侵限,势必给已然紧张的工期带来困难;如果采用直线段的限界标准来评判,正常运营后可能存在一定的安全隐患。
为了解决缓和曲线段的限界评判标准问题,研究确认了“车站范围内的缓和曲线段限界标准,采用从直线段限界标准至圆曲线限界标准的线性过渡插取作为评价依据”检测方案,这就要求缓和曲线段内检测到的每一个断面数据必须根据其里程信息自动生成各自的限界评判标准。
为了实现上述目标,限界检测程序采用以下算法:设直缓点里程为CH1,直缓点限界标准为(X1,Y1);缓圆点里程为CH2,缓圆点限界标准为(X2,Y2);根据线性插值算法,缓和曲线段中里程为CH的某一断面的站台限界标准(X,Y)为


至此,改进后的限界检测程序顺利地实现了缓和曲线段限界评判标准的自动生成。
3.3 实测结果示例
以某站内限界检测结果为例,图7表明了站台铺装层与屏蔽门底座存在侵限,表1列出了详细的侵限数据。

图7 限界检测结果示意

表1 某车站上行线北侧站台侵限结果
4 结语
基于2D激光扫描技术的车载式铁路限界检查测试系统,为轻轨铁路限界检查测试提供了大量精确的测试数据。依据这些数据进行了工程整改,最大程度上消除了安全隐患,保证了轻轨铁路的顺利开通运营。
实际检测工作中,在联调联试工作组的大力支持下,限界检测小组利用激光扫描技术和计算机编程技术,解决了一系列技术难题,实现了传统限界测量方法所不能达到的目标。相对于传统限界测量方式,本检测系统具有:用移动自动测量方式代替传统的人工定点测量,大幅度地提高了测试精度和工作效率;激光扫描技术稳定性好、精度高、抗干扰能力强;以三维立体图像方式实时展现测试数据,测试结果一目了然;根据直线段、曲线段限界标准的不同,能自动切换评判标准;对于缓和曲线段,能根据里程信息动态生成评价标准;检测设备集中化程度高,安装方便,适用范围广。
[1]国家标准局.GB 146.2—83 标准轨距铁路建筑限界[S].北京:中国标准出版社,1983.
[2]田葆栓.对铁路限界的分析与思考[J].铁道货运,2010(8):13-18.
[3]刘永中.地铁设备限界的检测方法[J].隧道建设,2005(4):70-71.
[4]王建波.激光测距仪原理及应用[J].有色设备,2002(6):15-16.
[5]王庆河,王庆山.数据处理中的几种常用数字滤波算法[J].现代电子技术,2003(4):53-54.
[6]杨铭.穗莞深城际铁路地下区间限界研究[J].铁道建筑,2011(10):29-31.
[7]邹有建,肖龙鑫,陈鼎.判断某点是否在任意多边形内两种算法的比较[J].地矿测绘,2009(3):28-30.
猜你喜欢
中学生数理化·七年级数学人教版(2022年9期)2022-10-24
铁道标准设计(2022年10期)2022-10-10
汽车实用技术(2022年14期)2022-07-30
今日农业(2021年7期)2021-11-27
交通科技与管理(2021年5期)2021-06-13
少年漫画(艺术创想)(2020年2期)2020-06-15
中学生数理化·七年级数学人教版(2019年9期)2019-11-16
趣味(数学)(2019年11期)2019-04-13
车迷(2017年12期)2018-01-18
中共南昌市委党校学报(2017年1期)2017-05-04
