
列车行车优化操纵的研究
2013-11-26 07:10:54何鹏飞
铁路计算机应用 2013年6期
何鹏飞
(中铁二院西安勘察设计研究院有限责任公司,西安 710054)
铁路运输属于能源占用型和资源消耗型行业,其能源消耗涉及诸多因素,作为铁路运营工作的一项重要经济指标。在铁路运输能耗中,机车牵引能耗占到铁路能耗的60%~70%[1],它不仅影响到运营成本的高低,还反映了铁路运输组织工作的水平。在一定的牵引机车、车辆线路等硬件环境下、列车编组计划等运营管理状况下,改进机车的操纵方法以实现列车的节能运行,是一条经济有效且直接可行的节能途径[2]。通过研究列车节能操纵优化的相关问题,提出切实可行的列车节能操纵方法,制定合理的列车运行图,给出适当的区间运行时间对铁路运输的可持续发展具有重要意义[3]。
同时,可以通过对节能运行操纵的改进和使用,通过计算机硬件和软件支持,为开发出列车运行自动驾驶系统,实现列车运行的智能化管理和运行提供理论和技术支持。
1 研究思路
本文研究的主要思想是通过采用由节时模式向节能模式转化的方法,寻找保证列车节能运行的最优行车策略。节时模式就是在保证列车行车安全、操纵合理的情况下,依据不同的线路断面情况以及断面限速,给出对应的操纵方式,使得列车速度尽量提高,以相对较高的速度完成区间行车,从而使得整个行车区间时间最短,由此得出的整个区间的行车操纵称之为节时模式。
节能模式是由节时模式转化而来,为了实现能耗最小化,将行车区间给定的区间运行时间作为限制条件,在节时模式行车的基础上,不断地采用合理的优化策略,通过增加区间运行时间来降低行车能耗,直到整个区间运行时间达到给定的时间,本文在总结以前各位学者提出的优化方法的基础上,提出了3种优化策略——牵引优化、惰行优化和停车优化,而且在优化过程中以能耗降低率作为策略选择的标准,使得优化过程更加合理。其中,对于坡道的划分,本文并没有采用以往简单的将坡道划分为上坡道、下坡道和平道,而是划分为增速坡道和非增速坡道两种[4]:
增速坡道:列车在此坡道上,采用惰行操纵工况,列车速度会增加,增速坡道为具有较大的坡度的下坡道。
非增速坡道:列车在此坡道上,如果采用惰行操纵行车,列车速度将会减小或者保持匀速运行,这种情况会出现在坡度较小的下坡道、平道和上坡道上。
优化变坡点是为了找出合理的优化位置,本文定义当行车断面由非增速坡道转入增速坡道的变坡点称之为优化变坡点,3种优化策略如下:
1.1 牵引优化
牵引优化是与充分利用下坡道的势能来提高列车速度的节能原则相对应的。主要的思想是从优化变坡点开始,向前寻找出变坡点前列车采用全牵引操纵的终止点,然后从全牵引终止点开始,再向前将一定操纵步长的全牵引操纵转为局部牵引,保证列车自此点开始保持匀速到达变坡点。这样列车经过变坡点进入下坡道的速度会有所降低,便于充分利用下坡道的势能。同时这也降低了这些步长内的机车牵引力,列车能耗也将随之降低。
1.2 惰行优化
惰行优化策略也是与充分利用下坡道的势能来提高列车速度的原则相对应的,该策略是从优化变坡点开始向前寻找变坡点前列车匀速牵引的终止点,然后由此开始向前将一定操纵步长内的匀速牵引操纵方式转为惰行。这样会使得列车在进入下坡道的速度进一步减小,从而更加充分的通过利用下坡道的势能来提高列车速度。同时因为取消了一定操纵步长内的牵引过程,列车能耗自然也随之降低。但这个过程必须保证列车在经过变坡点的速度要大于0,以保证列车能够顺利通过变坡点。
1.3 停车优化
停车优化是按照列车制动前增加惰行的原则,在列车经过进站道岔之前,进一步增加惰行操纵,使得列车在经过进站道岔时的速度进一步减小。这样做会同时导致列车在进站到停车之间运行时的惰行距离也随着增加,而从采取制动到停车的距离进一步减小。
图1给出了节能实现的优化策略选择逻辑框图,其中框图中参数的实际意义如下:
Tn——列车实际行车总时间,s;
T——区间规定运行时间,s;
lv1,lv2,lv3——牵引、惰行、停车优化策略对应的能耗降低率,kJ/s;
n——当前优化变坡点系数。
N——总的优化变坡点数。

图1 寻优策略选择逻辑框图
2 实例验证
为了对由节时模式向节能模式转化的优化操纵寻优方法进行验证,作者以Visual C++ 为平台。开发出了能够实现列车行车仿真优化操纵仿真软件。下面首先以大准线清水河——王桂窑段上行进行行车仿真,仿真之前应当输入整个区段的行车断面参数和列车编组信息,这些数据既可以在软件运行前在数据库中进行更新,也可以通过软件给出的数据交换对话框进行数据输入。
此处列车编组采用1台SS4机车牵引60辆C80,载重6 000 t作为列车编组;列车运行区间用时设置为18 min,进站道岔距停车点距离按照车站实际参数取1 200 m。
行车仿真结束后可以查看仿真结果,结果包含了列车编组主要信息,还有列车在两种模式下的耗时和能耗,同时给出了两种模式下的列车运行速度—距离曲线图,可以清楚地对操纵结果进行对比。优化操作结果如图2所示。
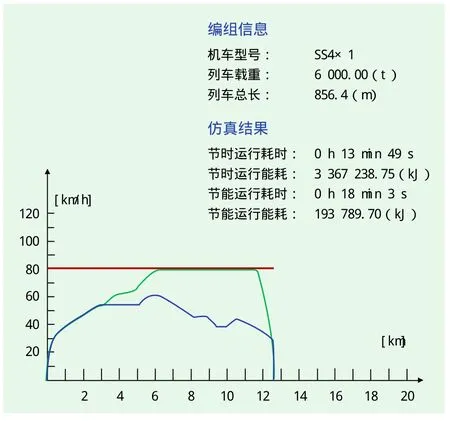
图2 优化操纵行车结果图
从图2的结果图可以看出:通过采用优化操纵,行车过程随着区间运行时间增大,行车曲线趋于缓和,同时列车能耗得到明显降低。而且通过图2中的结果表明,对整个行车仿真过程的操纵工况变化观察可以发现,在整个行车过程中,最初的5 300 m多的距离采用牵引操纵, 列车速度达到57.75 km/h,其中,3 100 m~5 035 m为局部牵引,其余断面均采用全牵引。列车在后面的行车过程中,都是依靠下坡道的势能,采用惰行操纵行车完成余下的行车区间,直至进站后列车速度下降到只有28.62 km/h时才制动停车,这些都与下面的优化行车原则相符合[5]:
(1)尽可能利用下坡道的势能;
(2)减少列车不必要制动产生的动能损失 ;
(3)制动前增加惰行。
可见由节时模式向节能模式转换的优化操纵行车策略中,最终得到的节能操纵行车与节能操纵优化行车原则是完全符合的。
在《大准线列车操纵示意图》中给出的在此编组下清水河—王桂窑段的操纵指导为:列车起车满负荷牵引运行,214 km处(大概为5 200 m),速度58 km/h,惰力运行,列车进站减压停车。与上面的节能仿真结果的操纵十分接近,这就说明了该方法的正确性。
同时,为了考察验证此方法内部算法的计算效率,在配置为处理器AMD athlon 64×2 Dual Core Processor 5000+,硬盘320 G,显卡为NVDIA GeForce 8500 GT的电脑上对此区段进行多次仿真,获得整个区间的平寻优均耗时只有1 min21 s。而目前采用的操纵寻优软件,一个区段的寻优过程一般需要花费1 h~2 h,可以看出本算法寻优速度很高。
同时为了验证在其它行车区段,行车区间存在限速变化时,该软件是否仍然可以使用,在此选取大准线北黄土沟—丹洲营下行区段作为实验对象,其中加入了低速限速,中间一些区段的限速为60 km/h,列车编组采用了1台SS4机车牵引128辆C80,此时车辆为空车,载重3 046 t,根据线路实际数据,进站道岔距停车点的距离为1 000 m,区间运行时间设置为17 min,由此得出的仿真行车结果如图3所示[6]:
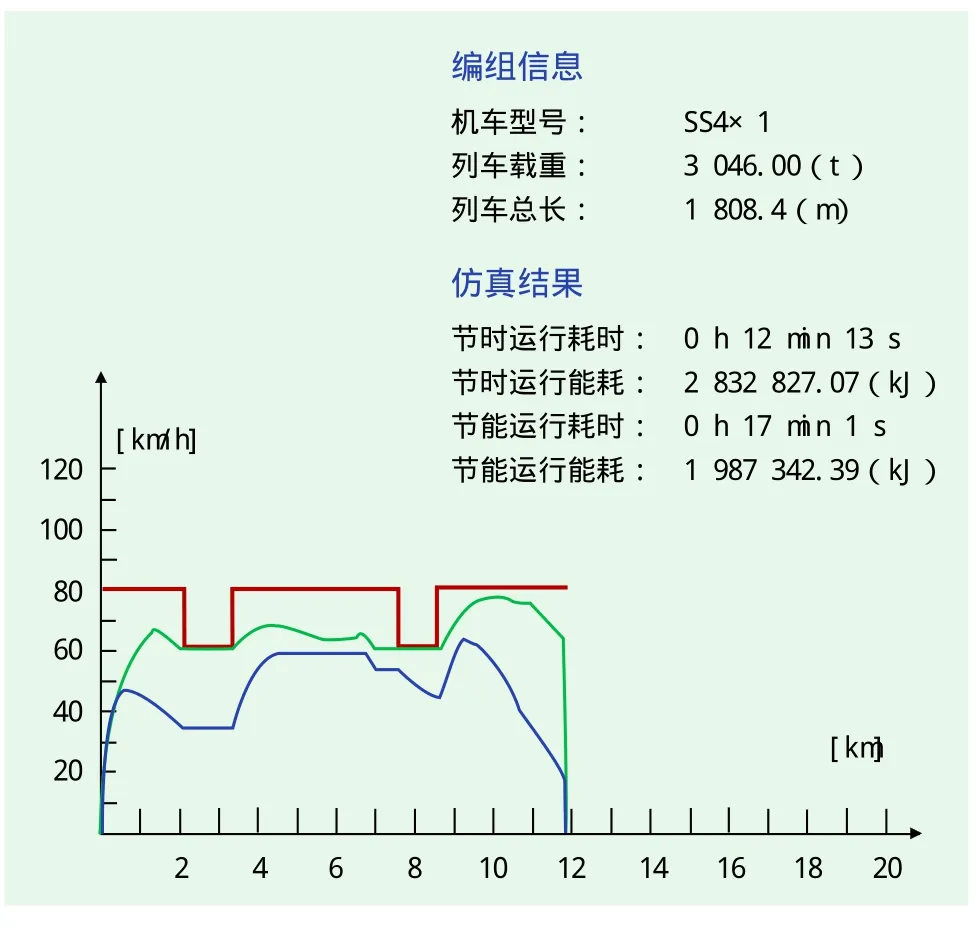
图3 存在限速变化优化操纵行车结果图
依据上面的实例仿真可以看出,虽然整个区间的行车限速是不一致的,整个行车过程无论是节时模式还是节能模式列车运行速度始终保持在区间线速以下,很好的保证了列车的行车安全,同时在限速变化时,行车曲线过渡平缓合理,从而可以说明该软件是适用于任何线路条件的,对行车结果进行对比,节能模式与节时模式相比,能耗降低明显,在原来基础上减小了29.85%。
3 结术语
本文在结合以往对列车运行优化操纵研究的基础上,提出新的方法来考虑优化行车由节时模式向节能模式转化的行车方法。本文作者以Visual C++ 6.0为平台,基于MFC开发出了能够实现列车行车仿真优化操纵仿真软件,实现了节时模式和节能模式两种不同的行车策略下的行车仿真,通过以大准线清水河—王桂窑上行、北黄土沟——丹洲营下行区段的行车参数进行实例仿真,验证了作者提出的由节时模式向节能模式转化的行车操纵寻优方法是正确可行的。
[1]王 峰.列车节能运行分析与优化研究[D].北京:北京交通大学硕士学位论文,2004.
[2]张 燕,王柄达.定时条件下列车节能操纵研究综述[J].交通运输工程与信息学报,2011,9(1).
[3]林 芝,季 令, 施其洲.交通运输业能源短缺问题及应对措施[J].铁道运输与经济,2006,(5).
[4]尹仁发.列车牵引运行仿真系统设计与开发[D].成都:西南交通大学硕士学位论文,2007.
[5]王自力.列车节能运行优化操纵的研究[D]. 西南交通大学学报,1994,29 (3):275- 280.
[6]何鹏飞.列车行车优化操纵的研究[J].成都:西南交通大学硕士学位论文,2012.
猜你喜欢
汽车实用技术(2022年15期)2022-08-19 02:29:52
文萃报·周二版(2022年23期)2022-06-11 20:55:46
露天采矿技术(2022年1期)2022-02-20 03:48:08
中国交通信息化(2019年9期)2019-11-16 09:22:38
中国交通信息化(2017年6期)2017-06-06 07:18:25
小学生导刊(2017年14期)2017-05-17 05:43:53
汽车与安全(2016年5期)2016-12-01 05:22:12
汽车维修与保养(2015年12期)2015-04-18 07:51:46
河北科技大学学报(2015年6期)2015-03-11 16:16:45
现代企业(2015年4期)2015-02-28 18:48:11
