
实验室自动分拣仓储系统设计
2013-11-23 07:22赵立辉霍春宝陈晓英
实验技术与管理 2013年11期
赵立辉,霍春宝,陈晓英
(辽宁工业大学 电气工程学院,辽宁 锦州 121001)
目前的大学教学体系中,PLC技术作为自动化学科的重点技术,越来越受到电类学科教育工作者的重视。纵观近几年在普通高校中PLC技术的实训实践设备往往相对封闭,可操作性和改造性不高,造成可设置的、让学生创新的实验项目并不多,应用起来并不灵活,学生插拔、连线的操作比较多,而知识体系形成的操作并不多,导致教育教学和工程实际的脱节[1-2]。
为提高学生动手能力,让实验设备更贴近实际,让实验项目设置灵活,设计研发了实验室自动分拣仓储系统。本系统模拟工业现场批量生产中的设备,要求机器设备能自动对工件进行检测、传送、加工、装卸、剔除废品,采用控制系统将各个部分的动作协调起来,使其按照规定的工艺自动进行工作,形成一套自动化生产线。生产线按模块化组合,控制器、模块、接线、界面设计都可以按设计者的思想更改设计方式,系统涵盖了计算机、工业控制网络、DeviceNet总线、Control-Logix控制器[3]、气动机械手、传感器等技术。在近1年来的实践教学中,取得了较好的教学效果,学生按组参加实践环节的锻炼,得到了PLC技术能力的提高。
本设计研发的系统以辽宁工业大学的工业控制网络实验室为平台,采用罗克韦尔公司的ControlLogix系列产品系统为控制核心,控制器采用西门子、欧姆龙等产品,模块相应可以配套扩展,程序及界面设计也可按需求和硬件设备采用相应平台开发。
1 系统总体设计
实验室自动分拣仓储系统是以材料分拣装置、机械手模型和自动立体仓库模型为基本单元,增加连接部件和PC-LINK网络技术,使之成为了一套模拟实际工业生产中连续复杂过程的教学装置。图1为系统总体结构图。
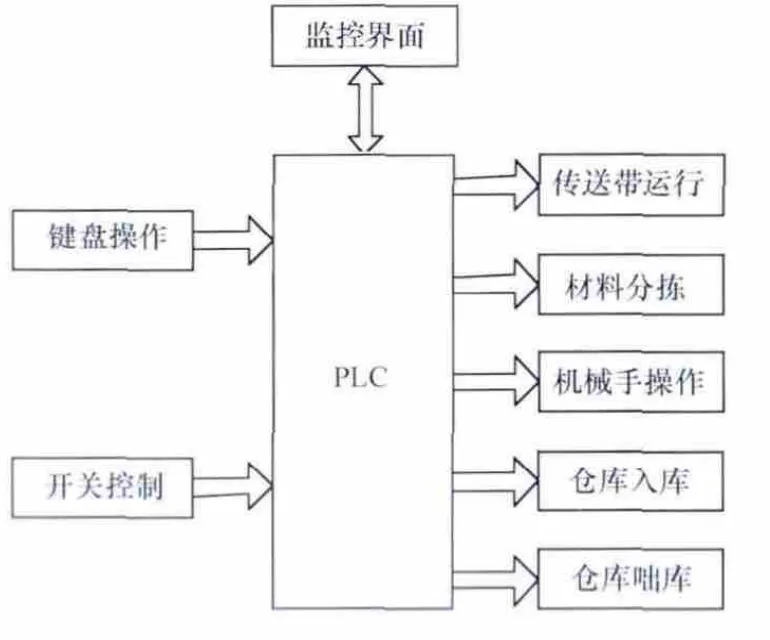
图1 系统总体结构图
系统技术要求:
(1)分拣材料能够包括塑料、铁块、铜块等常用工业材料,在传送带上可以完成分拣入仓,分拣速度30个/分;
(2)机械手操作,实现10个/分抓取操作,回旋角度180°;
(3)系统具有6个仓储用仓库,模拟工业现场真实仓库,根据实际要求可以按仓完成材料入库操作。
系统各主要组成部件如下。
1.1 监控主机端
PC机作为监控主机,它是工业控制网络上的一个节点,主要运行组态程序用于实时监控系统运行,本设计中包括完成硬件组态、控制器文件的实现、设置网络通信参数、编写软件梯形图及监控自动分拣仓储系统状态功能[4]。
1.2 工业控制网络
实验室自动分拣仓储系统采用开放式的工业控制网络模型NetLinx结构,分为3层:网络层、控制层和设备层[5-7],其中管理监控主机处于 EtherNet层、PLC控制器处于ControlNet、输入输出设备处于DeviceNet,具体结构如图2所示。系统中的监控主机主要实现编程、监控等功能,处于3层网络的最顶层,采用以太网标准协议与网络连接,设计中可采用西门子、欧姆龙等以太网模块实现对控制层的连接;PLC是现场控制处理器,设计中采用罗克韦尔自动化公司的1769-L32C模块连接控制网,可以配套相应的扩展模块,实现对自动分拣仓储系统现场设备节点的控制;光电开关、光电传感器、霍尔元件等设备采用RS485协议连接设备层。
1.3 PLC控制器
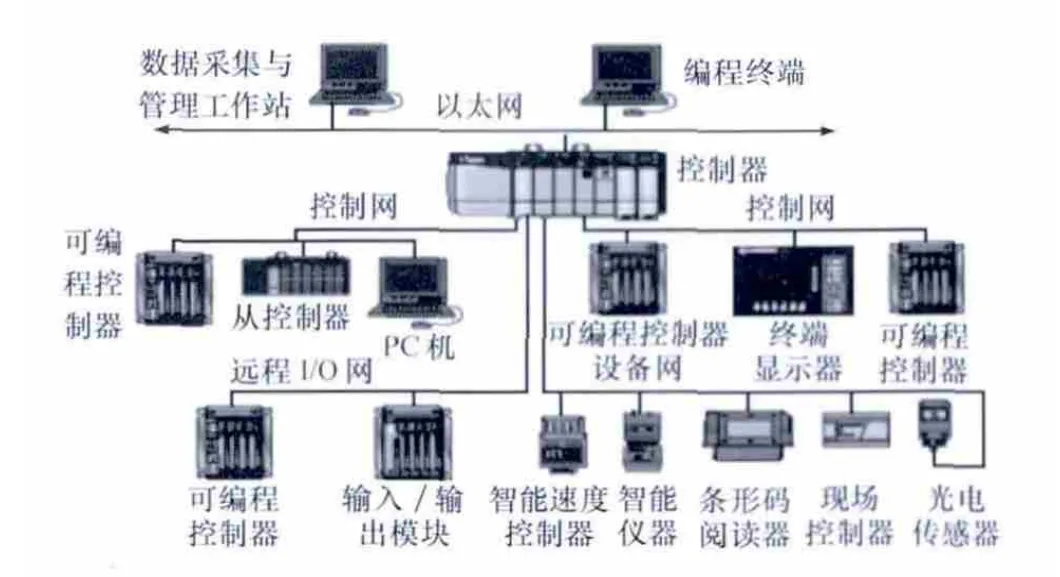
图2 开放式网络NetLinx结构
控制器是系统的控制核心,为了与教学课程配套,考虑到实验室的具体情况,学生设计中可以采用西门子、欧姆龙、罗克韦尔的PLC产品;教学中可以某一具体型号PLC为主要讲授内容,在实践教学中可以让学生在各种PLC上进行实际操作,使学生具有PLC设计实践工作能力。本文采用罗克韦尔自动化公司的可编程控制器,采用的型号为1769-L32C,其配套的模块包括各种数字量I/O口、模拟口、通信模块以及伺服控制器等,与现场工业设计完全一致。
1.4 气动机械手
机械手模型是一个模拟工业生产过程中自动化设备周边常见机械手的微缩模型,它使用了气动驱动、传感器、位置控制、电气传动等技术,具有零组件的自动输送、取拿和移送功能,可以作为四维运动控制装置[8]。
该装置采用架式结构,由气动组合机械手、输送带、供电部件、驱动部件和信号端子等组成,并配有电磁阀、传感器、直流电机等,配合PLC、单片机等控制器既可构成典型的机电一体化教学模型。机械手工作过程:当模拟零组件的料块放入取料位的相应位置,机械手将按以下步骤动作:(1)手臂回转收回;(2)手臂下降;(3)手指张开;(4)手指闭合夹物;(5)手臂抬升;(6)手臂旋转;(7)手臂前伸;(8)手臂下降;(9)手指张开放物。
1.5 输入/输出模块
输入/输出模块主要连接系统的I/O,模块要与PLC配套,在学生的实际教学中,让学生独自选择模块完成教学要求。
2 系统实现
2.1 控制要求
(1)出仓:手动将料块放入仓库,系统由电磁阀自动将料块推出到传送带上。
(2)分拣铁块:当传送带上的传感器检测到有铁块经过时,将其推入1#库。
(3)分拣铝块:当传送带上的传感器检测到有铝块经过时,将其推入2#库。
(4)机械手:当传送带上的传感器检测到有塑料块经过时,机械手动作,搬到缓冲台,准备入立体库,立体库具有选库功能,本模型具有4个库区。
(5)托台:将立体库中的空盒子搬到缓冲台,机械手将蓝块放入后盒子后,再将盒子送回立体库。
2.2 程序设计
程序的设计是PLC设计的重点,涉及到配置以太网模块、控制器配置、I/O模块组态以及梯形图的编写,系统可以采用不同的PLC配套相应的程序完成设计[9-12],学生可以得到多方面的训练。本文中系统在主机中采用罗克韦尔的RSLogix 5000软件完成。传感器检测、机械手动作、货物传送至传送带、传送带运送货物至仓库、检测入库、计数报警是自动分拣传送仓储系统流程,由主控制器ControlLogix系列的Logix1769处理器控制机械手传送带以及托台电机来完成。具体的主流程图如图3所示。
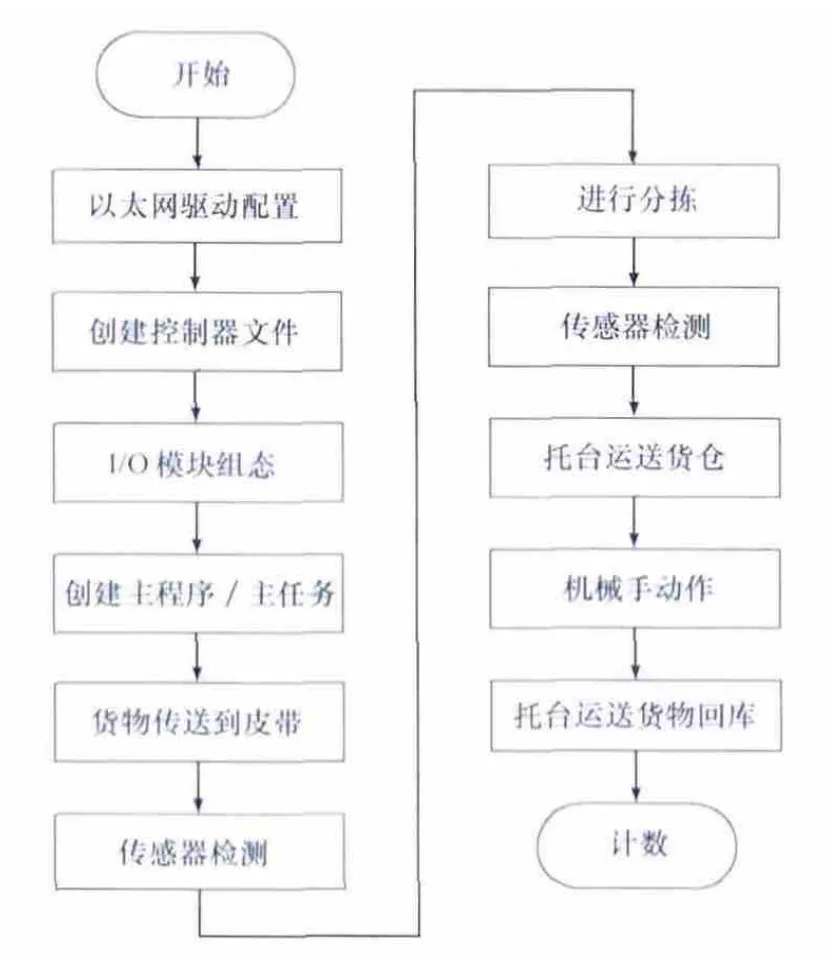
图3 系统的整体运作流程图
2.3 显示界面设计
组态功能由罗克韦尔Factory Talk View实现。在教学过程中可以让学生采用 MCGS、组态王、WINCC等组态软件编写程序,根据项目的不同、工艺流程的不同,学生独自思考问题,采用不同的软件完成监控界面的设计,在实践中取得了较好的效果。
本文采用FactoryTalk View Site Edition软件设计,用户只需一次设计图形显示画面,然后将其存储在服务器内,就可以在网络上任何一个客户端访问这些画面,无需拷贝、导入、转换或者重新输入标签或命令。设计的组态界面包括登录用户验证界面、运行主界面、按键界面和计数界面。同时还完成报表功能。主界面如图4所示。
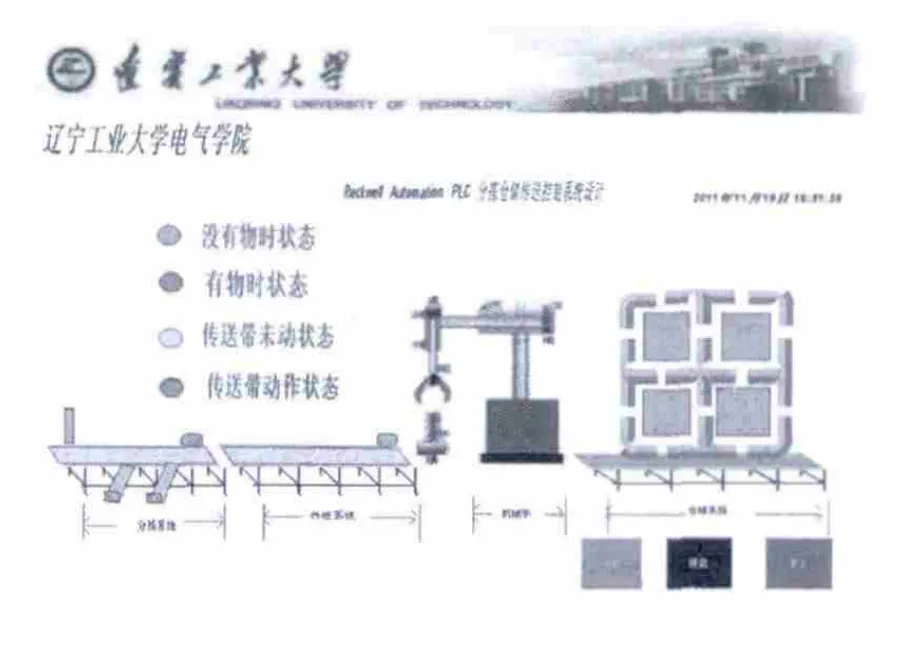
图4 自动分拣仓储系统组态界面主界面
2.4 调试运行
系统设计运行方式可以为连续运行、选择入库方式运行以及按键手动运行,运行方式灵活。经过软硬件组态、网络组态,根据工艺流程编写相应程序,经调试上电运行,传送带工作正常,可以实现对不同材料的分拣;机械手部分可以流畅运行,完成取物、抓取、放置、运送、分拣等自动生产线工艺流程,托台部分可以准确地完成左行、右行、上升、下降,取物进、取物出等流程,符合控制要求,能够灵活地为学生实践教学服务。
3 系统为学生提供的教学服务
3.1 学生可获得的能力分析
技术上该系统集光电技术、步进电机控制、传感器技术、PLC控制技术于一体,是实际运行的工业生产线的实验室模型,解决了专业实验设备重理论、轻实践,连线少、控制复杂但可操作性差的特点,在提高学生专业知识与实际技能的结合上发挥了重要作用。课程教学上,该系统与PLC课程、传感器课程、电气控制、控制理论等紧密结合,是相关电类课程的良好实验设备,该系统具有课程知识综合性的特点,达到提高大学生创新能力、综合能力和实践能力的目的。
3.2 开设的实验实训项目
系统设计之初紧密结合电类学生实验实训项目需要,能够开出设计性、综合性实验项目10多个,可以采用不同的PLC配套相应的模块、程序完成项目设计。再结合传统的实验设备、电机、模块等,可以设计出满足开放实验、创新性实验需要的项目,符合新形势下提高大学生能力的需要。
经过教学实践,在系统上可以实现综合性、设计性项目15个,项目可以按年级不同专业学生分组开展教学活动,可由学生自主设计完成,也可以用作工程项目演示使用。实验项目包括四大类:
(1)基础性实验:包括传送带产品分拣实验、机械手取物实验、自动仓储实验及PLC通信控制实验;
(2)综合性实验:包括自动分拣仓储系统运行实验、PLC动态界面设计触摸屏与PLC系统联合调试实验、多站台三层网络系统设计实验;
(3)设计性实验:包括基于MCGS的欧姆龙PLC自动仓储系统实验、基于 WINCC的西门子S7-200PLC自动仓储系统实验、PLC与控制电机产品联合设计实验、多厂家产品互联仓储系统实验等;
(4)演示性实验:包括自动分拣仓储系统综合运行演示。
4 结论
自动分拣仓储系统设计完成后,经过1年多自动化、电气专业本科生的实践教学应用,学生从电气设计、PLC选型、I/O口分配、扩展模块选择、生产工艺等方面经过了系统化、贴近生产实际的训练,在专业知识、实践经验、设计能力等方面都得到了提高,取得了较好的教学效果;同时,可以与专业的生产设计厂家配合,设计研究出配套的、符合生产实际设备的模块与本系统结合使用;让学生独立思考,可以满足多专业、多层次的学生实验、实践教学需要,为国家、省大学生创新项目、竞赛项目服务。
(
)
[1]王兰英.MCGS组态软件在PLC实验教学中的应用[J].物理实验,2012,32 (11):44-46.
[2]岳洪伟.基于LabVIEW的数字信号处理虚拟实验平台实现[J].实验技术与管理,2011,28(8):70-72.
[3]韩烨,刘志刚,李文帆.基于LabVIEW的新型电能质量分析软件开发[J].电力系统保护与控制,2012,40(16):121-125.
[4]孙大卫,丁兴俊.一种典型自动控制原理实验教学设备研究[J].实验技术与管理,2011,28(7):79-81.
[5]王莉,杨鹏.基于LabVIEW的虚拟示波器的设计与实现[J].实验室研究与探索,2010,29(1):62-64.
[6]陈永利,李玉鼎.PLC和人机界面组合的控制系统研究[J].制造业自动化,2012,34(13):128-150.
[7]关明,周希伦,马力静.基于PLC的机械手控制系统设计[J].制造业自动化,2012,34(14):140-142.
[8]李振东.组态王与PLC控制的交流闭环变频调速系统[J].化工自动化及仪表,2012,39(9):1190-1193.
[9]张顺昌,张玉洁.组态软件在电气控制与PLC教学中的应用[J].中国现代教育装备,2009,13(83):46-48.
[10]朗朗,陈跃东,陈欣.PLC课程体系的多层次实验结构的研究[J].电气电子教学学报,2010,32(2):70-72.
[11]郑春娇,王金成.基于ControlLogix控制器的实验室自动生产线控制系统[J].电工电气,2011(5):36-38.
[12]樊超.ControlLogixPLC控制系统的组成及应用[J].现代电子技术,2004,27(3):17-19.
猜你喜欢
河北农机(2020年10期)2020-12-14
制造技术与机床(2018年11期)2018-11-23
凿岩机械气动工具(2017年2期)2017-07-19
制造技术与机床(2017年4期)2017-06-22
通信电源技术(2016年1期)2016-04-16
工业设计(2016年11期)2016-04-16
中国铸造装备与技术(2015年5期)2015-12-10
筑路机械与施工机械化(2014年4期)2014-03-01
自动化博览(2014年9期)2014-02-28
自动化博览(2014年4期)2014-02-28
