基于iSIGHT 重于水的无人自治潜水器概念设计及优化方法
2013-11-22 01:00:06刘建民
海洋工程 2013年3期
颜 翚,葛 彤,王 彪,刘建民,赵 敏
(上海交通大学 水下工程研究所,上海 200240)
现代海洋资源开发规模的日益扩大与海洋工程的多种需求,对水下作业工具的种类与性能提出了越来越高的要求,小型无人自治潜水器(autonomous underwater vehicle,简称AUV)以其灵活、安全、低成本的特点逐渐成为人类进行海洋探索的重要手段。传统的潜水器多为中性浮力,需要携带体积较大的浮力调节装置,在航行时不仅浪费了能量也影响了运动的灵活性。这里提出一种新型的重于水的无人自治潜水器(heavierthan-water AUV,简称HTW AUV),可以在负浮力的情况下航行,不需要携带或者只需要携带体积较小重量较轻的浮力部件,从而达到减小体积,提高航行能力的目的。
HTW AUV 利用其搭载的机翼在航行中产生的升力平衡在水中的剩余重量,从而实现它在水中保持一定姿态巡航的功能。2009年上海交通大学制作的第一台HTW AUV 原理验证样机飞鱼Ⅰ成功在环形水池中平稳航行,验证了这一概念的可行性(见图1[1])。2010年,上海交通大学在飞鱼Ⅰ的基础上设计了第二台HTW AUV 试验样机飞鱼Ⅱ,采用更加流线的外型和气动性能更好的机翼,以实现更优的运动性能,飞鱼Ⅱ的外形如图2 所示,图中显示了飞鱼Ⅱ在拖曳水池准备进行试验的情景[2]。二代样机的研制不仅证明了HTW AUV 在负浮力情况下航行的可行性,同时也验证了HTW AUV 概念设计方法的有效性。以飞鱼Ⅱ为例,详细描述HTW AUV 的概念设计与优化方法。

图1 飞鱼ⅠFig.1 Flying FishⅠ
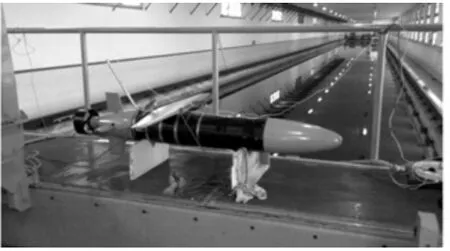
图2 飞鱼ⅡFig.2 Flying Fish Ⅱ
1 HTW AUV 概念设计
1.1 设计依据
HTW AUV 的概念设计同时借鉴了潜水器[3-4]与飞机的设计经验[5-6]:以目前世界上最通用的小型AUV 之一——REMUS100 为母型,即参考其主尺度、重量与工作深度等,借鉴潜水器的一般设计方法,进行重于水的潜水器总体设计。以重于水的潜水器试验样机——飞鱼Ⅱ为例(见表1),描述HTW AUV 的概念设计过程。

表1 飞鱼Ⅱ的设计参数Tab.1 Design parameters of Flying Fish Ⅱ
1.2 主艇体设计
1.2.1 艇型设计
目前的小型潜器设计中,多采用流线型回转体,它具有几何形状简单、流体静力、动力特性优良的特性。结合总布置要求,艇体的结构形式通常可以分为3 部分:首部、平行中体、尾部。鉴于REMUS100 的艇体型线数据目前无法取得,采用MIT 壳体模型公式进行型线计算[7]。MIT 艇体模型如图3 所示。

式中:Lb为艇体总长,D 为艇身直径,nf和na分别为首部和尾部形状系数,它们表征前后端形状的饱满度;Lf,Lpmb和La分别为首部、平行中体和尾部长度;Yf和Ya分别为首部和尾部型线关于艇身首部和尾部纵向坐标Xf、Xa函数值。平行中体为耐压结构,其内部采用肋骨加强,肋骨形式如图4 所示。
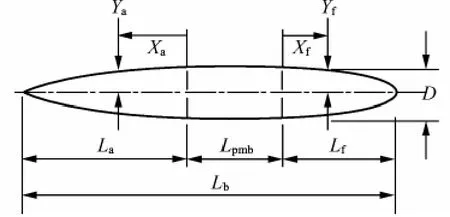
图3 MIT 艇体模型Fig.3 MIT hull model
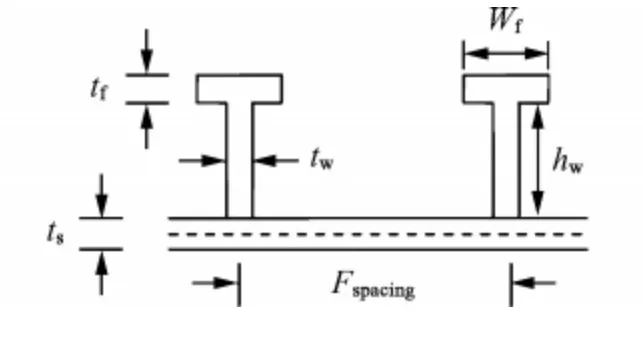
图4 “T”型肋骨环向加强圆柱壳的截面示意Fig.4 The typical segment cross section of a stiffened cylindrical shell reinforced by“T”type stiffeners
1.2.2 耐压结构校核方法
重于水的潜水器的平行中体直接作为耐压舱,在耐压壳结构设计中,需要同时考虑耐压舱的水动力特性、内部和外部布置、材料可获得性、成本及建造工艺的方便性等。耐压壳的结构形式和结构材料主要由最大工作深度和有效载荷决定,重于水的潜水器选用圆柱形壳体形式,并采用肋骨加强来保证圆柱形壳的稳定性。
进行强度及稳定性校验的时候,考虑五种失效模式:肋骨间板壳屈服;肋骨间板壳失稳;总体失稳;肋骨屈服;肋骨失稳。采用的强度及稳定性校验方法为:肋间处和肋骨处板壳应力计算方法用于校核肋骨处和肋骨间2 处屈服情况[8];板壳屈曲强度的校核方法用于校核肋骨间板壳屈服情况[9];基于最小位能原理的临界压力计算方法用于校核总体失稳情况[10];环向加强肋无偏心与偏心产生弯曲应力计算方法用于肋骨间屈服校核[11-12];肋骨稳定性计算方法用于校核肋骨失稳情况[13]。安全系数分别为1.5、2.25、3.75、1.5、1.5[14]。
1.3 机翼与尾翼设计
1.3.1 机翼翼型选择
翼型按使用的速度范围,可分为低速翼型、亚声速翼型、跨声速翼型和超声速翼型,需要根据航行时的速度范围来选用相应的翼型。翼型适用类型的速度范围可以用雷诺数的数值来区分,雷诺数是流体流动中惯性力与粘性力比值的量度记做Re,为流体力学中表征粘性影响的相似准数,其表达式:

式中:ρ,μ,υ 分别为流体密度、流体动力粘性系数和流体运动粘性系数;U0,l 分别为特征速度和特征长度。雷诺数越小意味着粘性力影响越显著,越大则惯性力影响越显著。
以飞鱼Ⅱ为例说明翼型选择过程,其设计巡航速度为6 kn,艇身长度1.6 m,15℃时海水密度为1 032.3 kg/m3,运动粘性系数为1.188 31 ×10-6,由此计算可知飞鱼Ⅱ的雷诺数为4.16 ×10-6,所以其翼型选择可以参照小型飞行器,选用低雷诺数下的翼型。初步选择2 款适合小型飞机的低雷诺数翼型进行详细分析,此2 款翼型分别是RG15 和Aquilasm。这2 种翼型的极曲线如图5 所示。
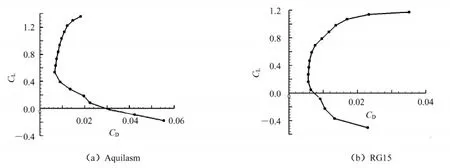
图5 RG15、Aquilasm 性能曲线Fig.5 RG15 and Aquilasm capability curves
从极曲线可以看出,与Aquilasm 相比,RG15 翼型在某一段较大的范围内,升力快速上升时,相应增加的阻力却很小,说明RG15 翼型具有使潜水器升力快速增加,阻力增加小的能力,性能优于Aquilasm。鉴于以上原因,飞鱼Ⅱ的主翼初步选择RG15 翼型。
1.3.2 机翼展弦比确定
对RG15 翼型机翼在不同展弦比时的性能进行比较,最终确定机翼展弦比。
机翼升阻性能初步的估算可以利用经验公式:
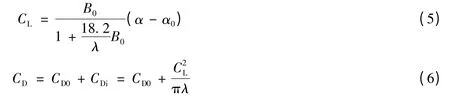
式中:CL为升力系数;B0为展弦比无限大时升力系数曲线斜率;α 为机翼迎角;α0为翼型的无升力迎角;CD为机翼阻力系数;CDi为诱导阻力系数;CD0为翼型阻力系数;λ 为展弦比。
查RG15 的翼型资料,可知α0= -2.5°。分别计算展弦比在5 ~8 时的机翼性能,如图6 所示。
比较图6 中曲线不难发现,机翼流体动力性能都随展弦比的增加而提高,且展弦比在5 ~8 之间时,机翼雷诺数变化较小,对各翼型流体动力性能影响不大。同时考虑到,翼型为RG15 的机翼升力系数在6 时比在7 时只略小一些且与展弦比7、8 相比,展弦比为6 时,翼根较厚,机翼强度更高更安全。最终确定飞鱼Ⅱ的机翼展弦比为6。

图6 RG15 机翼性能曲线Fig.6 RG15 wing capability curves
1.3.3 机翼安装角选择
机翼安装角的选择目标是,重于水的潜水器艇身水平直航时,机翼攻角对应较大的升阻比,即在获得足够升力的同时,产生最小的阻力。以飞鱼Ⅱ为例,由图6 可以看出,翼型为RG15,展弦比为6 的机翼最大升阻比对应的攻角为2°,但是在2°攻角下,此种机翼的升力系数略小,这一情况会导致飞鱼Ⅱ需要较大的机翼面积,不仅增加结构重量,同时增加阻力,造成能量的浪费。所以选择牺牲一些升阻性能,来换取较高的升力系数,将机翼安装角定为3°。
1.3.4 机翼面积确定与尾翼设计
翼升力L 常用无量纲的系数CL表述,可用公式表示如下:

式中:CL为机翼升力系数,S 为机翼或者尾翼参考面积。
重于水的潜水器流体动力焦点可以由式(8)估算得到:

式中:Xf为整机焦点距机翼气动平均弦前缘的距离(用气动平均弦长百分数表示);SH为平尾参考面积;Sw为机翼参考面积;lH为平尾力臂,即平尾平均气动弦1/4 弦点至机翼平均气动弦1/4 弦点之间距离;cA为机翼平均气动弦长。
水平尾翼翼型与展弦比选择过程与机翼类似。机翼与水平尾翼的配合设计需要遵循2 个条件:其升力之和为重于水的潜水器的水中重量,如式(9);机翼升力与水平尾翼升力围绕重于水的潜水器流体动力焦点力矩平衡,如式(10):

式中:L 为升力;M 为绕整机流体动力焦点力矩;下标w 为机翼,下标H 为水平尾翼;Gwater为重于水的潜水器的水中重量。
以飞鱼Ⅱ为例说明主翼与水平尾翼设计过程,其设计航速为6 kn,水中重量为22 kg。由图6 可知,选定的机翼的升力系数为0.43。考虑到尾翼兼有舵的功能,需要以正负舵角转动,所以尾翼选用对称的NACA0012 翼型,展弦比的选择过程与机翼类似。考虑到加工方便等问题,机翼采用梯形比为2.5 的梯形翼,尾翼采用矩形翼。由力与力矩平衡方程式(9)、(10)反复迭代,最终确定机翼、水平尾翼参数如表2 所示。
1.3.5 垂直尾翼设计
在飞机设计中,垂直尾翼在机身上的位置,一般都在机身的尾部。垂直尾翼的设计借鉴飞机总体设计中垂直尾翼的设计方法,采用尾容量系数法,如式(11)。即通过选取同类型飞机的平均值或参照某一特定类型的原型机来选择合适的系数Kv,然后根据机身布置确定垂尾力臂,最后计算得到垂直尾翼面积。这里选取垂尾力臂和水平尾力臂在同一铅垂线上。

考虑到飞鱼Ⅱ的机身为圆柱形,并且机身直径只有0.19 m,推进器也置于尾部,因此飞鱼Ⅱ采用十字尾翼,即在尾部中纵剖面内布置上下对称的垂直尾翼。结合同类型飞机的尾翼比例,选择Kv=0.098 进而可以得到垂尾的几何参数,见表3。
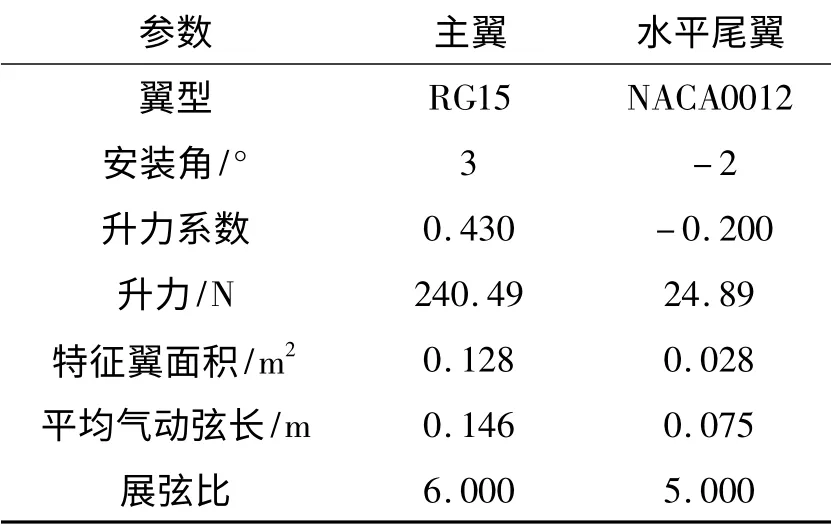
表2 主翼、尾翼迭代结果Tab.2 Main wing and tail plane's results by iteration
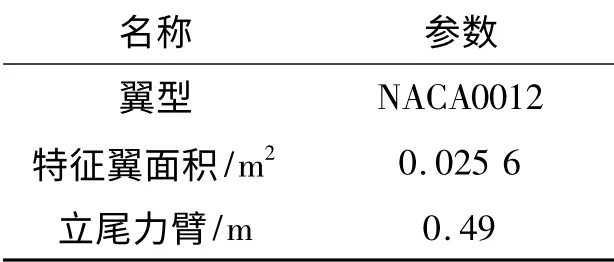
表3 垂直尾翼几何参数Tab.3 Basic parameters of the vertical tail
2 主艇体优化
2.1 iSIGHT 软件概况
iSIGHT 是ENGINEOUS 软件公司的旗舰产品,在过程集成和设计优化领域的市场占有率超过一半,已经成为该领域厂商们的首选设计软件。工程师经常需要多种工具或方法来解决他们的设计问题,一个典型的设计过程可能包括:商业CAD 软件——定义几何模型并使之参数化、CAE 求解器——执行有限元分析、Excel 电子表格等。根据实际需要选择设计工具之后,iSIGHT 将这些工具组装在一起并建立关联,形成一个集成的设计过程。iSIGHT 根据自带的各种算法,通过智能化的探索,选择新的设计点,执行模拟分析流程[15-16]。
将设计相关计算写入Excel 中,使用iSIGHT 软件Excel 集成功能,完成重于水的潜水器的主艇体设计参数的优化。
2.2 输入、输出及目标函数
对于使用iSIGHT 软件进行设计优化,首先需要明确定义其输入变量与优化目标。对所要设计的飞鱼Ⅱ主艇体来说,优化的目标是在主艇体直径、长度一定,并满足总布置的情况下,取得较低的阻力Db与重量Gb。但是这两个目标变量不一定同时达到最优,因此引入了目标函数do。

式中:上标“—”表示无因次化;下标“b0”表示初始值计算。
一般来说,使用iSIGHT 软件进行主艇体设计时,输入参数为R(艇身半径)、nf、na、Lf、Lpmb、La、d(壁厚)、tw、hw、tf、Wf、Fspacing。首先选择一系列初始输入参数值,计算主艇体的初始重量及阻力,在此基础上再进行优化。优化的目的是得到最优设计参数,使目标函数值达到最小,即艇身重量与阻力互相配合达到最优状态。因此将目标函数值do 作为输出值,优化设计过程即为求解目标函数最小值的过程。
2.3 约束条件
参数取值的约束条件由强度及稳性约束条件、补充约束条件组成。
1)强度及稳性约束条件,共6 条。
按照1.2.2 中板壳、肋骨的稳性及屈服情况有5 项校核方法,其中在板壳屈服校核的时候,计算了肋骨处和肋骨间2 处应力,因此这里对应了2 个约束条件,其余每项都对应了1 个约束条件,则在强度及稳性校核中,存在6 个约束条件。
2)补充约束,共8 条。
美国船级社规范要求2 条约束:

式中:E 为材料弹性模量;σ0为肋骨间屈服极限。
根据“传统圆筒加筋型压力壳与多球加筋型压力壳结构强度比较值研究”有3 条约束:

自定义2 条约束:

艇长约束(为满足总布置要求,平行中体长度为0.94 m,主艇体长度与REMUS100 一致,为1.6 m):

2.4 优化结果
以飞鱼Ⅱ主艇体优化设计过程为例,描述基于iSIGHT 软件的重于水的潜水器优化方法。对于飞鱼Ⅱ来说,在艇身直径确定为0.19 m 时,为保证其足够的耐压舱容积,令Lpmb=0.94 m,则iSIGHT 软件输入参数为nf、na、Lf、La、d、tw、hw、tf、Wf、Fspacing。选取一系列输入参数初始值(参数初始取值参考以前设计的主尺度和工况相似的AUV),与约束条件、输出参数一起写入iSIGHT 软件中,初始情况与优化结果如图7 所示。
图7 参数初始值及优化结果Fig.7 The initial value and the result of design optimization
将优化前后飞鱼Ⅱ主艇体的重量、阻力、目标函数值等进行比较,如表4 所示。容易看出,优化后,主艇体的重量、阻力、目标函数值等均有减小,用ε 表示优化程度,ε 的计算方法如式(23)所示。

式中:N0为设计初始值;Nc为实际参数值。
实际参数值指结合实际的加工工艺,在保证结构强度及稳定性的前提下,对优化结果进行一定的处理,最终在可以加工中使用的数据。

表4 iSIGHT 优化结果Tab.4 The result of design optimization by iSIGHT
3 结 语
HTW AUV 作为一种新型无人自治潜水器,航行在负浮力情况下,节约了浮力部件所占用的空间与重量,具有不可忽视的优点,适用于长航程及大范围的作业。以飞鱼Ⅱ为例,提供了一整套HTW AUV 概念设计及优化方法,优化结果表明,主艇体重量优化程度可以达到21%,阻力优化程度达到2.9%。这种概念设计与优化方法作为一种通用的设计手段,适用于不同设计需求的HTW AUV。
[1]WU Chao,WANG Qiang,YAN Hui,et al.Practicability research and design of the underwater plane[C]// Proceedings of the ASME 2010 29th International Conference on Ocean.2010:1-6.
[2]YAN Hui,GE Tong,LIU Jian-min.Analysis of motion in longitudinal plane of negative buoyancy vehicle[C]//2011 International Conference on Information Systems and Computational Intelligence.2011:V3-165.
[3]曾庆礼,张宇文,赵加鹏.水下滑翔机总体设计与运动分析[J].计算机仿真,2010,27(1):1-5.
[4]邱敏秀.水下滑翔机设计优化与运动分析[D].杭州:浙江大学,2007.
[5]方捷译.飞机设计问题论文集[M].北京:国防工业出版社,1963.
[6]张锡金.飞机设计手册(气动设计分册)[M].北京:航空工业出版社,2002.
[7]Matthew A Martz.Preliminary design of an autonomous underwater vehicle using a multiple-objective genetic optimizer[D].A Thesis Submitted to the Faculty of Virginia Polytechnic Institute and State University,2008,5:13-16.
[8]Von Sanden K,Gunther K.The Strength of Cylindrical Shells,Stiffened by Frames and Bulkheads,under Uniform External Pressure on All Sides[R].David Taylor Model Basin,DTMB Report,T-38,1952.
[9]Windenburg D F,Trilling C.Collapse by instability of thin cylindrical shells under external pressure[J].Transactions of ASME,1934,56:819-825.
[10]Bryant A R.Hydrostatic Pressure Buckling of a Ring-Stiffened Tube[R].Naval Construction Research Establishment,NCRE Report No 306,1954.
[11]Jackson H A.Submarine design trends[D].Cambridge:Massachusetts Institute of Technology Professional Summer Class Notes,2001.
[12]Kendrick S B.The buckling under external pressure of ring stiffened circular cylinder[J].Transaction of Royal Institute of Naval Architects,1965,107:139-156.
[13]Tokugawa T.Model experiments on the elastic stability of closed and cross-stiffened circular cylinders under uniform external pressure[C]// Proceedings of the World Engineering Congress.1929:249-279.
[14]James P P.Structural performance of a hybrid sandwich submersible pressure hull stress and stability analysis of stiffened cylindrical shell including through-thickness shear[D].Master Thesis,MIT,1995.
[15]任 利,邵圆圆,韩 虎.基于iSIGHT 的多学科设计优化技术研究与应用[J].起重运输机械,2008(5):46-47.
[16]许河川.基于形状优化的多级优化设计的研究[D].南京:南京航空航天大学,2004.
猜你喜欢
湖北工业职业技术学院学报(2021年1期)2021-04-01 09:22:28
机械设计与制造(2021年2期)2021-03-05 10:00:14
名车志(2020年10期)2020-10-27 09:51:06
民用飞机设计与研究(2020年1期)2020-05-21 07:24:38
兵器装备工程学报(2020年3期)2020-04-22 08:53:20
小学生学习指导(低年级)(2019年12期)2019-12-04 03:39:32
小学生学习指导(低年级)(2019年12期)2019-12-04 03:39:30
北京航空航天大学学报(2017年8期)2017-12-20 08:04:56
安徽农学通报(2017年18期)2017-10-18 21:11:49
产品可靠性报告(2017年6期)2017-09-05 10:04:18