基于数字图像处理的水中微气泡参数的测量
2013-11-12 08:39焦斌亮秦晓慧
激光与红外 2013年1期
焦斌亮,秦晓慧
(1.燕山大学信息科学与工程学院,河北秦皇岛066004;2.河北省特种光纤与光纤传感重点实验室,河北秦皇岛066004)
1 引言
在污水处理技术中,微气泡常被用来实现固-液分离,从水相中整治具有挥发性的污染物以及分离水相中的微材料,从而清除水体的污染[1]。污水处理的效率与水中微气泡的尺寸和产生速率有直接的关系。因此,在水处理技术研究和应用中,对微气泡的有关参数进行监测是十分必要的。
对于微气泡尺寸与速度的测量,国内外学者提出的方法有很多。文献[2]采用waddel圆盘直径表征气泡的尺度,文献[3]采用横向扫描和纵向扫描,得到气泡的边缘差,继而换算求出气泡的直径。这两种方法的实现都要求拍摄的气泡图像尽可能的保持球状,因此对照相机的曝光频率有较高的要求。目前对于气泡速度的测量,多集中于利用PIV[4]与PTV[5]算法进行测量。本文利用数字图像处理的方法,对实验室条件下产生的气泡图像进行预处理,对其直径与运动速率进行了测量。
2 实验系统与图像预处理
如图1所示,在一个宽300 mm,高800 mm,水平厚度为40 mm的矩形水槽中注入一定量的常温自来水,用一个氧气泵插电源顺塑料管连接礁石产生气泡,为防止在发泡过程中塑料管漂移,在塑料管中插入一定长度的铜丝,沿水槽壁固定塑料管。在水槽两侧放置两盏卤素灯,使得拍摄的气泡亮度均匀。在水槽正前方一定位置放置CCD摄像机,本文实验数据是用佳能Powershot A3100 IS相机拍摄的,每秒钟可拍摄30帧图像。

图1 实验装置图Fig.1 the scheme of experiment equipment
将拍摄得到的气泡图像采用去除背景,灰度级变换,中值滤波,阈值分割等预处理操作较为清晰的图像。其中灰度级变换是由降低图像的灰度级得到,中值滤波采用3×3中值滤波器,去除背景中的一些孤立小点,阈值分割采用迭代法进行全局阈值分割,按灰度分割选取的阈值为60,即将灰度值大于60的像素点显示为白色,低于60的像素点显示为黑色。为检测分割效果,应用roberts算子检测气泡边缘,并将其与原灰度图像叠加。可以看出叠加效果较好,说明分割结果较为准确。如图2所示,列出了图像处理前后气泡图像的对比。

3 气泡的测量与讨论
3.1 气泡直径的测量
从拍摄到的图像可以看出,气泡的运动导致形状被拉长,因此其直径不能通过测量气泡的面积来计算。由于气泡的大部分运动表现在竖直方向,因此,对得到的气泡二值图像,可以通过水平扫描线来测量其直径,取水平扫描线段最大值为气泡的直径。以上方法计算出的气泡直径是以像素为单位的,实验中,通过拍摄等距离钢尺的照片来为图像定标,定标得到长度值为1 cm时,正好对应11个像素。最后测得气泡的平均直径为3.554 mm。这种方法对照相机的闪光频率没有较高的要求,因此在一定程度上降低了实验成本。
3.2 气泡速度的测量
常用的数字图像处理测量速度的方法有PTV与PIV两种。对于稀疏的粒子图像采用PTV方法测量粒子速度较为准确,而对于高密度的粒子图像常采用PIV算法。下面就两种方法在不同粒子浓度的情况下对粒子速度进行测量。
对于稀疏气泡速度的测量采用PTV算法。其原理为:对相邻两帧气泡图像利用一定的匹配方法找到两帧图像中的匹配气泡,继而根据两帧图像中相关气泡的位置信息,求出相关粒子间的位移信息,最后结合时间间隔求出每个气泡的速度。这种方法的优点是可以跟踪流场中示踪粒子的运动,具有准确和直观的特点。
利用PTV算法测量气泡速度的关键在于粒子的匹配。通常情况下,描述一个二维随机变量(X,Y)两个分量之间相互关系的数字特征为协方差及相关系数。设(X,Y)是二维随机变量,则X与Y的协方差为:

其中,EX和EY分别为随机变量X和Y的数学期望,记DX和DY为随机变量X和Y的方差,若σX=,则其相关系数为:

因此,采用协方差的方式计算两帧图片的相关系数,可分析图片的相似性,相关系数越大,则图片的相似性越大。
本文中的粒子匹配采用了一种改进的算法,即结合了互相关算法的思想,采用人机交互的方式实现粒子的匹配。如图3所示为PTV算法的粒子匹配示意图,首先在t时刻的气泡图像中用大小为14×14的小窗口选取某个气泡,在t+Δt时刻的气泡图像中选取待查询区域的大小为34×34,其中,待查询区域的确定是在t时刻选取的小窗口的基础上沿水平方向分别向两边扩展10个像素,竖直方向向上扩展20个像素完成的。通过计算选取气泡图像的最大相关系数,在t+Δt时刻的图像中找到与t时刻选取粒子匹配率最高的粒子,即为相关粒子。从图3中得到的提取出的匹配图像可看出,虚线小框为t时刻气泡的位置,实线小框为t+Δt时刻气泡的位置。读取两框的中心坐标,即可利用以下公式求出气泡的速度:
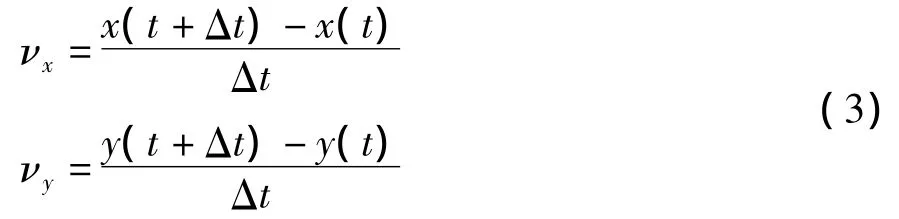

图3 PTV算法的粒子匹配示意图Fig.3 the particlematching schematic of the PTV algorithm
图4所示为经图像处理后的相邻两帧稀疏气泡图像,应用上述方法,除去不合理的气泡和误匹配的气泡,得到9个气泡的速度值,取平均求得气泡的平均速度为 364.639 mm/s。

图4 相邻两帧稀疏气泡图像Fig.4 sparse bubble images of adjacent frames
对于高密度的微小粒子,常用到的测速方法为PIV算法,即粒子图像测速法。实验室拍摄的经图像处理后的相邻两帧高密度气泡图像如图5所示。

图5 相邻两帧高密度气泡图像Fig.5 high-density bubble images of adjacent frames
PIV算法即粒子图像测速法,测量原理是将气泡看做流场中的示踪粒子,通过卤素灯的照明,用CCD相机记录粒子的运动图像以及相邻两帧图像序列之间的时间间隔,继而对得到的相邻帧图像进行相关分析,识别示踪粒子的位移,最后求出流场的速度场。本文不需要求流场的速度场,但可应用该算法求出水中气泡的运动速度。常用的PIV算法有两种,基本相关算法和FFT快速相关法。由于基本相关算法耗时太长,故本文尝试用FFT快速相关法来测量高密度气泡的速度。
其算法流程图如图6所示,在相邻两帧图像的相同位置开一诊断窗口,其中f(i,j)是t时刻图像灰度值,g(i,j)是t+Δt时刻图像的灰度值,黑色区域是查询窗口,通过计算图像对的互相关函数极大值的位置即可确定窗口的相对位移,继而求出气泡的平均速度。在本文中,我们将图像划分为8×8个16×16的网格,计算出每个网格的平均速度,由于在图像的边缘没有气泡分布,故而在求最终的平均速度时我们除去边缘的网格,只计算中间6×6个网格的平均速度,得到的平均速度为300.263 mm/s。
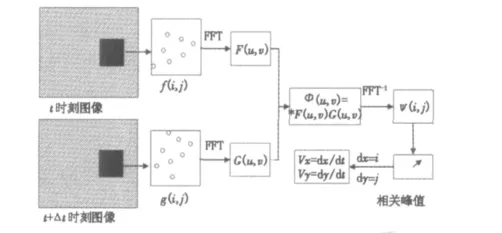
图6 FFT快速相关法的流程图Fig.6 flow chart of the FFT fast correlation method
3.3 讨 论
(1)大部分文献应用PTV算法测量稀疏气泡的速度时,都是通过求出每个气泡的质心,利用匹配气泡的质心坐标求解气泡的速度。但是这种方法需要额外对气泡进行标号才能正确匹配。本文改进的算法是在相关分析后,直接得到匹配的气泡,利用所选取的气泡框的中心坐标偏移量直接求出所选气泡的速度。在一定程度上,降低了算法的复杂度。
(2)对高密度气泡图像应用PIV算法计算平均速度时准确度依旧不是很高,原因主要有:①PIV计算的是网格的平均速度,由于图片含有的空隙比较多,导致部分网格里面的气泡数目较少或为0,致使无法准确匹配,最终导致计算出的结果误差较大;②快速傅里叶互相关法没有考虑到跑出查询窗口外的气泡的运动情况,也会导致测量的不精确。
4 结论
本文对实验室拍摄的气泡图像进行了预处理,得到了边缘较好的二值图像,在无需照相机较高闪光频率的前提下,运用横向扫描法较好的得到了气泡的直径。对稀疏气泡图像采用一种改进的PTV算法,高密度气泡图像采用快速傅里叶互相关算法,分别测出了气泡的平均运动速率。
[1] SE Burns,SYiacoumi,C Tsouris,etal.Microbubble generation for environmental and industrial separations[J].Separation Purification Technology(S1383 - 5866),1997,11(3):221 -232.
[2] Sun Chunsheng,Zhang Xiaohui,Han Hongwei.Image proceeding of micro-bubbles'size distribution in water[J].Opto-Electronic Engineering,2012,39(1):7 - 11.(in Chinese)
孙春生,张晓晖,韩宏伟.测量水中微气泡尺度分布的图像处理[J].光电工程,2012,39(1):7-11.
[3] Wang Tian,Yu Jia,Wang Jincheng,et al.Technology of digital reconstruction in detecting hologramof underwater bubbles field[J].Laser & Optoelectronics Progress,2010,47(3):93 -97.(in Chinese)
王添,于佳,王金城,等.水下气泡场探测全图的数字再现技术[J].激光与光电子学进展,2010,47(3):93-97.
[4] Luo Wei,Zhou Xiaode,Cheng Wen,et al.Research advances of PIV in gas-liquid phase flow[J].Transducer and Microsystem Technologies,2006,25(2):1 - 6.(in Chinese)
罗玮,周孝德,程文,等.PIV应用于气液两相流的研究现状[J].传感器与微系统,2006,25(2):1-6.
[5] Tang Hongwu,Chen Cheng,Chen Hong,et al.An improved PTV system for large-scale physicalriver[J].Science Direct(S1001 -6058),2008,20(6):669 -678.
猜你喜欢
中学生数理化·八年级物理人教版(2022年9期)2022-10-24
资源信息与工程(2021年5期)2022-01-15
新潮电子(2021年7期)2021-08-14
建材发展导向(2021年13期)2021-07-28
中学生数理化·八年级物理人教版(2020年9期)2020-11-16
四川地质学报(2020年2期)2020-05-31
中学生数理化·八年级物理人教版(2019年9期)2019-11-25
儿童故事画报·发现号趣味百科(2019年9期)2019-02-02
中国房地产业(2016年8期)2016-03-01
发明与创新(2015年26期)2015-02-27