SMOS卫星遥感海表盐度资料处理应用研究进展
2013-11-12 05:30:16安玉柱杨代恒
海洋科学进展 2013年2期
陈 建,张 韧*,安玉柱,马 强,杨代恒
(1. 解放军理工大学 气象海洋学院 江苏 南京,211101; 2. 军事海洋环境军队重点实验室,江苏 南京 211101;3. 成都军区气象中心,四川 成都 610031)
海表盐度(Sea Surface Salinity, SSS)在大洋环流、海气相互作用等全球大气、海洋过程中起着重要作用。一方面,海表盐度影响制约着障碍层形成、深层水团形成、温盐环流等海洋物理过程,利用盐度分布特性可以推测海洋上层垂直剖面结构、计算海洋的热贮存等;另一方面,作为海气交界面处的关键要素,海表盐度的季节和年际变化和El Nio、蒸发与降水等海气相互作用现象息息相关,是理解和预测气候变化必须的信息,同时还可运用于海洋模式边界条件确定、海表饱和水汽压计算等。为此,欧洲的土壤湿度和海洋盐度卫星(Soil Moisture and Ocean Salinity, SMOS)已先于美国的宝瓶座盐度卫星(Aquarius)发射实施。
SMOS是欧洲航天局(ESA)生命行星计划中的地球探测者机遇任务的第2颗卫星,可提供全球范围内高频率、业务化、特定精度和覆盖率的陆表土壤水分和海表盐度信息,其中海表盐度为SMOS主要观测量。在SMOS发射之前,海洋水色、海表温度、海洋地形、海流、海风、海冰等几乎所有的海面要素都实现了遥感观测,盐度是唯一尚未实现从太空进行遥感监测的海面要素。鉴于盐度在海洋科学研究中的重要性,目前源自现场观测的盐度资料无论在时间连续性,还是空间分辨率上都已远远不能满足科学研究的需要。因此,全新的SMOS卫星遥感海表盐度资料显示了其难以替代的科学价值。
SMOS卫星由法国公司制造,主要投资方来自法国和西班牙,重658 kg,设计使用寿命为3 a,包括试运行的半年和正式运行2.5 a以及2 a的扩展运行和10 a的任务后处理。SMOS卫星运行在太阳同步晨昏轨道,平均轨道高度为755 km,上午6:00越过赤道北上,下午18:00越过赤道南下,最大访问周期3 d,卫星扫描带宽1 000 km,平均像素大小43 km。卫星采用法国航天局和阿尔卡特-阿莱尼亚航天公司联合研制的PROTEUS卫星平台。合成孔径微波成像辐射计(Microwave Imaging Radiometer using Aperture Synthesis, MIRAS)是搭载于SMOS卫星的唯一有效载荷,它是由西班牙航空制造股份有限公司领导的20多家欧洲公司联合建造,展开直径约为6 m,有Y型的3个天线臂。MIRAS工作在微波L频段,是首个极轨运行的天基二维干涉辐射计,中心频率为1.413 GHz,该频段在避免人为辐射噪音并把大气层、天气和地表植被等造成的干扰降至最低的同时,保证了对土壤湿度和海洋盐浓度的最大敏感度[1]。
SMOS卫星于2009-11发射升空试运行并传回首批观测图像,2010-05进入了正式运行阶段。SMOS的测量目标为:精度0.1、时空分辨率200 km×200 km /10 d或100 km×100 km /30 d[2]。
1 SMOS海表盐度资料
1.1 产品分级
SMOS海表盐度产品分为以下几个级别:1) Raw:卫星接收到的原始格式资料,即CCSDS包格式的星上数据;2) L0:对Raw进行格式化后得到的源包格式资料,即带有头文件的星上数据;3) L1a:对L0进行单位转换和校准后得到的校正可见度;4) L1b:对L1a进行图像重构后得到的天线极化参照系下亮温的傅里叶分量,即以仪器快照为单位的亮温;5) L1c:对L1b亮温进行地理定位重组后得到的天线极化参照系下的ISEA[3]网格上以轨道为单位的亮温;6) L2:对L1c亮温进行迭代反演后得到的ISEA网格上的基于3种不同反演算法的轨道级海表盐度场以及相应的不确定度;7) L3:对L2 海表盐度进行时空重组后得到的不同时空分辨率的网格化海表盐度场,如200 km×200 km / 10 d,100 km×100 km / 30 d等以及相应的不确定度;8) L4:L3海表盐度与其它数据融合后得到的改进的、精度更高的海表盐度场及一些衍生产品,如密度场、雨量分布等。
1.2 文件格式
SMOS产品采用二进制-XML混合格式的文件存储方式,即1个SMOS产品由1个头文件和1个数据块文件组成,2个文件分享同一个文件名,仅用不同的扩展名来区分:头文件为“.HDR”,实为ASCII格式的XML文件;而数据块文件为“.DBL”,为二进制格式。头文件和数据块文件通过“.ZIP”格式对外发布。头文件包含固定头文件和可变头文件,其中固定头文件对所有数据类型结构都相同,可变头文件则允许对不同的数据类型有不同的定义和结构信息,因此其下又包含主要产品头文件MPH和特定产品头文件SPH;数据块文件包括一个或多个数据集,每个数据集又包括一系列统一的数据集记录,包含格点数目和各个格点的内容,如格点标识、地理坐标、亮温或海表盐度及其误差和相关辅助参数、控制标记、控制描述、科学标记、科学描述等,涵盖了整形、实型、比特型等不同类型,以及长整型、短整型等不同长度,因此需要其储存方式的说明[4-6]。ESA提供了一组基于C++语言的二进制-XML库函数来读取二进制-文本混合格式,SMOS网站上提供了此库函数及说明文档下载(http:∥www.smos.esa.int/BinaryXML/)。头文件和数据块文件是所有产品共有的;视产品类型不同,还包括JPEG格式(.jpg)的快照数据产品、XML格式(.EEF)的质量报告等。
1.3 数据发布
L1和L2级的资料发布于欧空局地球观测系统(http:∥eopi.esa.int/esa),可用EOLI(Earth Observation Link)软件下载,同时提供了一个全新的交互式用户管理系统CARE CMS (https:∥caresp.eo.esa.int/care-sp/);SMOS巴塞罗那研究中心(BEC)发布了一套简化的Netcdf格式L3资料(http:∥tarod.cmima.csic.es),但其不包含质量控制标记且不区分上升、下降轨道;而SMOS L3/4产品处理中心(SMOS level 3 and 4 Processing Centre, CP34)的CP34 Light Web接口((http:∥www.cp34-users.cmima.csic.es/light_web/homeAction.do)则提供了原始格式,即二进制-XML混合格式的L3资料。
2 海表盐度反演
2.1 基本反演方法
海表盐度反演经历了一个逐渐发展、完善的过程,事实上直到现在也未达到一个完美的精度。Zine等[7]对其过程进行了概括总结。SMOS现阶段业务化运行中反演的基本原理和技术途径可大致归纳如下。
海面亮温TB是海表发射率e和海表温度SST的函数,即TB=e·SST。e是海水的相对复介电常数εr的函数,而εr又与SSS、SST以及电磁波频率f、入射角θ、极化方式p和海表粗糙度r等因素相关εr,即
TB=TB{e[εr(SSS,SST,f,θ,p,r,…)],SST}=TB(SSS,SST,f,θ,p,r,…)
(1)
盐度反演的复杂性在于如何在具有一个合理的空间分辨率的前提下达到严格的精度要求,而选择1.4 GHz波段可以在保持TB对SSS较大敏感度的同时减小各种噪音的影响。

(2)


图1给出了海表盐度反演的算法流程。L2数据块文件包括每个ISEA49格点上的:3个SSS反演值、SST/WS辅助参数、极化亮温、相应的理论不确定度等地球物理相关参数;指示辐射噪音、外源污染等造成的反演质量的控制标记和描述;指示海冰、大雨、近陆等可能影响反演质量的物理条件的科学标记和描述。除了头文件和数据块文件之外,还有一份质量报告[4]。
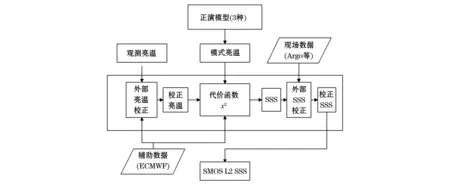
图1SMOS海表盐度反演算法流程Fig.1 Retrieval algorithm flow for SMOS SSS
目前,寻找有效提高观测和反演精度的误差订正方法仍是一个亟待解决的问题。SMOS发射前,Sabia等[17]就已系统研究了SMOS反演方案中的误差源及其分布:1)亮温观测不精确、辐射噪音干扰、近陆污染等场景误差;2)太阳/大气等外源误差移除不彻底、校准稳定性与图像重构误差等因素;3)由于海水介电常数模型不精确、依赖于海表状态的粗糙度模型不精确等环节可能产生的误差源。SMOS发射之后,这些误差问题有些退居其次,有些则更加突出。以下简要分析几个最为重要和突出的问题。
2.2 观测亮温误差来源和移除
2.2.1 辐射计信号漂移
SMOS发射后,试运行阶段就发现MIRAS的一个突出问题:观测亮温随时间所表现出的长期和短期漂移现象[18]。具体表现在SMOS亮温图像在很大程度上是由MIRAS的3个参考辐射计单元,即噪音注入辐射计(Noise Injection Radiometers, NIR)决定的,而辐射计接收到的信号将会受物理温度变化的影响而产生漂移,如轨道的晨昏位置变化引起的太阳直接加热和星系反射辐射加热变化、季节更替引起的温度变化等都会导致辐射计数据接收漂移,而该问题在SMOS发射前是没有充分预计到的。
Kainulainen等[19]运用外部目标观测 (External Target Observation,ETO)方法,基于简单天空参照物,研究了NIR的短期稳定性;通过对多个天空观测,估计出一个平均天线温度,分析了其时间序列特征规律,研究了NIR的长期稳定性;随后将参照物扩展到太平洋和南极洲等其他目标,并进行了类似分析,归纳、提取出一组校正系数,并基于该校正系数,发展了一个新的双系数热力学天线模型用以代替先前的单系数模型。通过对单坡度热力损失模型的性能评估发现:仅对天空目标进行短期双周轨道漂移校正时可以达到预期设计要求,但对长期漂移仍无能为力,其机制目前仍不明了。
为了对辐射计的长期稳定性进行评估,业已进行了一些著名的地面试验,如始于2008-12,为期2 a的Domex-2实验中,将南极洲的Concordia站 (Dome C)作为外部目标,通过收集地面数据来监测校正MIRAS的性能。实验发现:2009-2010年的2 a间,V偏振方向亮温的高度稳定性得到了确认,而H方向由于南极大陆表层和次表层的复杂因素影响而呈现出较大的波动。尽管如此,现场观测的亮温无论是角度差异还是时变趋势都和SMOS的观测比较一致,下一步需开展的工作是对亮温的空间稳定性进行分析[20]。
上升和下降轨道间的差异也是一个重要的误差来源,它一方面体现在前面所述由于探测器位置不同而引起的温度差异,另一方面则体现在由于运行方向不同而引起的陆地或海冰污染区域的差异上。
2.2.2 近陆污染
由于陆面和洋面辐射性质的显著差异,靠近陆地一定范围区域的亮温需作剔除处理,即使距离稍远不作剔除,也应进行标记以示陆地的潜在影响[12]。当大片陆地进入SMOS的扫描范围,亮温漂移形态会有一个显著的扭曲。近陆污染主要体现在亮温图像重构环节上,对试运行期间的反演盐度精度曾产生严重影响,在对反演算法和分析处理程序完善、更正后,近陆污染已大为减小[18]。
2.2.3 无线电频率干扰
无线电频率干扰(Radio Frequency Interference,RFI)是指MIRAS受保护波段即1 400~1 427 MHz频谱受到人为辐射噪音造成的干扰。由于MIRAS仅此一个辐射频段且每1.2 s才测一次值,加之MIRAS的干涉仪性质也会产生RFI痕迹,因此常规的标准RFI检测方法并不奏效。研究发现[21]:受到RFI污染的区域主要集中在北大西洋、地中海、北印度洋、中国近海等区域;目前相对有效的移除方法,一是利用全偏振特性获取更多信息,二是只采用六边形即视场中心区域内的亮温测值。另外利用航空微波遥感实验进行校正也是一个正在探索的方法。2010年在比斯开湾进行的CAROLS 辐射计航空实验也证实了在比斯开湾SMOS下降轨道数据受到了RFI污染[22]。有关RFI的问题尚需进一步深入、细致的研究。
2.2.4 海洋目标变换
仪器校正后仍然存在的亮温偏差,若该偏差沿轨道或在不同轨道的空间分布基本不变,则属系统误差,可通过经验性的海洋目标变换(Ocean Target Transformation, OTT)方法移除。作为一个重要的外部亮温校正方法,OTT由Meirold-Mautner等[23]首先提出,其基本思想:对于多个观测点,用正演模型和辅助数据计算伪亮温,观测亮温与伪亮温之差的空间平均定义为仪器误差引入的偏差,用观测亮温减去此偏差得到校正亮温。随后,Talone等[24]改进了OTT方法,使其不依赖于具体的模型,并提出了参数均匀化方案,一定程度上改善了OTT的效果,并用于业务阶段的仪器校正。但是目前业务上OTT算法仍然受正演模型缺陷的影响,表现在当天顶角和入射角不同时,误差分布将有所不同,随着地表条件参数的改变偏差订正会有0.5 K左右的变化,且受到来自太阳和天空的污染。针对上述缺陷,人们提出了相应的改进算法[25],其主要特征是进行了数据选择,使其在各种不同的地球物理条件下保持稳定(5 < WS < 11 m·s-1时变化小于0.1 K),但缺点是对数据选择有严格要求,且因法拉第效应和星系影响无法混合使用上升和下降轨道数据。
OTT方法未能彻底消除亮温的长期漂移,至于是否需要运用时变OTT方法以及使用视场中的哪部分观测数据和运用何种极化方式,都是选择运用最优OTT方法中需要考虑的问题。
2.3 正演模型及反演算法改进
盐度反演不仅要求仪器性能良好,对数据处理也有严格的要求。L波段海表粗糙度模型存在较大的不确定性,它首先反映在模型的多样性方面[7]:模型1用双尺度方法处理电磁散射,并用双DV (Durden & Vesecky)波谱描述粗糙表面;模型2基于小坡度近似辐射理论和Kudryavtsev海面波谱模型,用一个特定的泡沫模型计算泡沫影响;模型3则是基于既有数据归纳、提取得到的半经验公式。上述3个粗糙度模型均需要在SMOS运行过程中进行校正、测试、改进和比较。
海表粗糙度最重要的影响因素是风速。SMOS与现场资料的差异分布表明[26]:TB(WS)属于非线性函数关系,粗糙度模型的误差随风速增大(12 m·s-1以上)而增大,但在大洋南部大风区SMOS反演的SSS场整体偏小。因此,无论是理论模型,还是半经验粗糙度模型都需通过实际数据来进一步拟合和优化模型参数。例如,通过数据拟合得到的模型1的优化参数,其初步校正结果在3~17 m·s-1风速范围内SSS的平均反演偏差较之发射前的模型结果有明显降低;同时鉴于辅助风速数据和真实风速之间的差异,也需对风速反演结果进行部分校正,即分析反演SSS误差前首先应注意ECMWF风场和反演风场间的误差,以使风速适应范围和SSS精度两者之间达到较好平衡。再处理过程中提出了3种新的粗糙度模型[27],突破了一直以来用TB与WS的线性关系来描述粗糙度模型的局限,刻画了TB和WS间的非线性关系。并在2~15 m·s-1范围内得到了较好的验证(3种模型差异小于0.5 K),但在大风环境下运用仍存在较大偏差。
除粗糙度以外,银河系噪音的影响也在模型中得到了考虑和相应的优化[26]。但是由于仪器误差的存在,正演模型调整仍很困难,仅能对模型本身进行改进;同时,风速仅刻画了海面粗糙度的一阶近似,海况、大气稳定性、海流等不容忽视的影响因素(某些海区的影响幅度可达1 K)仍未得到充分考虑。
3 海表盐度标准化产品制作
L2级产品的时空分辨率大约为15.74 km×15.74 km/3 d,数据量非常大,同时由于反演算法的复杂性,其观测误差也大于可接受的范围。研究表明[7],根据轨道中位置的不同,L2 级海表盐度的误差在中心为0.5 psu而在边缘则可达1.7 psu。因此,通过对L2级产品进行网格化处理,进一步得到L3级标准化产品,这样既可通过降低时空分辨率减小数据量、提高产品精度,也可提供更便于研究和应用的再分析产品。
SMOS L3级海洋盐度产品类型(L3OSPT)有6种,产品类型与数据输入、输出及处理过程参数如表1[28]。
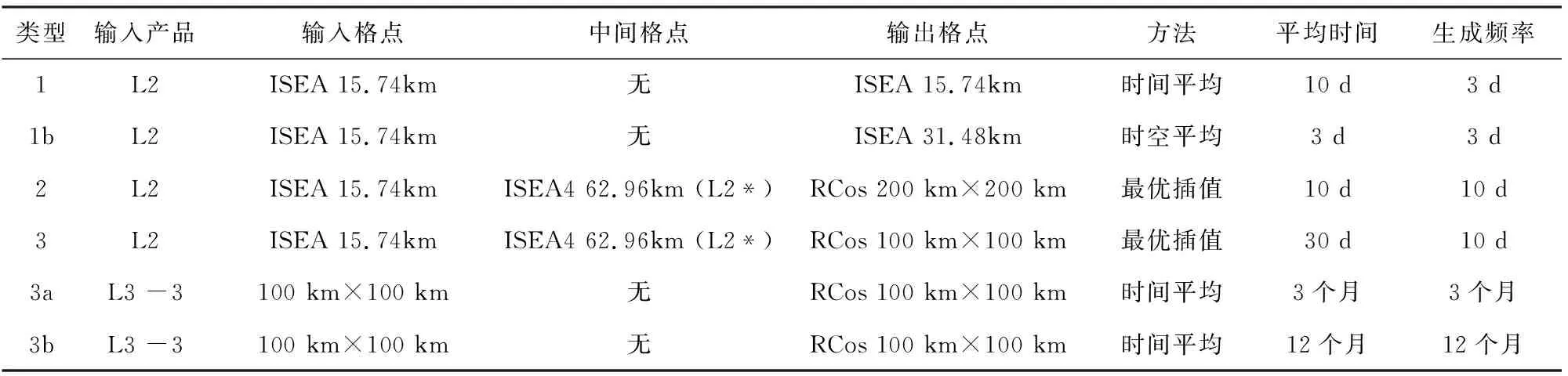
表1L3子产品参数Table 1 Parameters of L3 sub-products
注:ISEA 15.74 km = ISEA49,ISEA 31.48 km = ISEA48,ISEA 62.96 km = ISEA47;RCos为一种纬距相等、经距不等的等距离格点


(3)
式中,σi为L2观测值xi的观测误差,它由观测点在FOV中的位置和其它外源误差决定。
L3-2和L3-3级产品均采用最优插值(OI)处理,但时空窗口选择不同。在SMOS前,OI被用于多种遥感数据的客观分析处理,如海表温度、海面高度异常、水色等。早在2008年,Obligis等[29]就运用OI生成盐度图像,模拟出了L3-2/3产品,得到了较满意的效果;Jorda等[30]系统地给出了CP34中采用的L3产品处理方案和相应的配置。OI处理中给出了L3格点上的分析场向量xa以及分析场误差估计var(εa),其具体方法原理、步骤参见文献[31]:
xa-xb=ST·(B+R)-1·(dobs-db)
(4)
var(εa)=var(εb)diag[I-ST·(B+R)-1·S]
(5)
式中,xb为L3格点上的背景场向量;S为观测点和L3格点间的相关系数矩阵;B为观测点间相关系数矩阵;R为观测误差的相关系数矩阵;I为单位矩阵;dobs为观测值向量;db为观测点上的背景场向量;var(εb)为观测场方差即信号方差;diag表示对角值。
Jorda等[32]利用OI误差估计公式,系统量化了观测误差对L3产品精度的影响,分析结果表明:L3-2、L3-3若要获得0.1的精度,则L2的最大观测误差应不超过0.8和1.1,他同时还进行了鲁棒性分析。Gourrion等[33]针对SMOS试运行期间上升轨道全偏振业务模式的L1B产品,用一个简略反演方案和非业务L3同化方案,将得到的L3图像与WOA05气候态资料和Argo资料进行对比,发现其并未达到要求的精度;与热带大西洋漂流浮标的对比结果表明,当前100 km×100 km/10d格点资料产品的误差介于0.3~0.6[34]。
L3-3a/b是L3-3分别进行季节和年平均得到的产品。
L3数据块文件包括每个ISEA48/49或RCos格点上:3个SSS的L2输入观测数量、L2输入贡献方差、L3绝对值/参考值/异常值、背景场、相关理论不确定性等地球物理学参数;对L2控制标记和描述进行总结得到的质量控制标记。除了头文件、数据块文件、质量报告之外,还有若干快照数据产品[5]。
4 海表盐度的多源数据融合
目前,关于L4级产品的算法研究尚不多。Jorda等[35]着重分析了L3级产品的误差方差,并利用最优插值可融合多源数据的优点,将L3与Argo、CTD和锚定浮标等辅助数据结合,并在R中考虑了不同数据仪器所致的精度误差以及由于将海表下几米近似作为海表所致的代表性误差,生成了模拟L4产品,并进行了多个对比实验。结果表明:对误差减小贡献最大的是空间分辨率而非时间分辨率的提高,尤其在SSS方差较大地方获得的辅助数据对精度的改善效果最为明显,而辅助观测在较长相关尺度的区域效果最好。
在ECMWF,为合理同化SMOS亮温资料而进行的业务化准实时产品再处理和监测工作已初见成效[36];2011-06美国航空航天局NASA的Aquarius发射后,两种卫星产品的结合应用也提上了议程,如进行彼此资料的交叉验证、资料融合、RFI检测和过滤等[37]。
SMOS海表盐度资料虽然还未得到深入应用,但是可以预见,该资料在融合现场资料或其它遥感产品、重构SSS场或盐度剖面中将会有重要的应用前景。在重构SSS场方面,Brassington等[38]指出SMOS观测的SSS会有较大的期望误差,误差方差限制了对整个海洋状态甚至是SSS本身的准确分析,他通过估计遥感SSS对一个由SST和SLA(海面高度异常)构成的多元海洋数据同化系统的影响,提出了一个简单的解析公式来诊断观测误差方差的大小,该诊断公式用于一个最优插值方案的结果表明,SST和SLA在中高纬度显著约束了SSS的误差方差,而在低纬约束较弱,这意味着遥感SSS观测有望明显改善赤道海域的多元分析,而在中高纬的改善效果则比较有限;Delcroix等[39]通过对大约1000万个经过校正的现场SSS观测如VOS、TAO/TRITON浮标和Argo剖面等进行客观分析,得到1950-2008年热带太平洋(120°E~70°W,30°N~30°S)时空分辨率分别为1°×1°/1个月的SSS格点数据集以及相关误差场,并提出了当现场观测网更成熟、卫星遥感SMOS或Aquarius资料可获得时,对该产品进一步改进和更新的相关设想。在重构盐度剖面方面,早在1999年,Hansen等[40]就用温度观测剖面和SSS资料估计了上层海洋的盐度剖面,刻画出了海洋上层盐度变化的基本特征和障碍层等物理海洋现象,用此盐度剖面估计出的位势高度均方差相对不使用SSS资料的情况减少了50%。该研究是基于将来遥感SSS场较之深层观测更易在大范围内取得的预期设想得到的。此后,基于温度、盐度、高度三者结合来重构温盐剖面的研究层出不穷,其中很多研究强调了SSS观测的重要性,如Agarwal等[41]将经验正交函数分解EOF和遗传算法GA相结合,提出了一种用SSS构建盐度三维结构的方法,得到了印度洋次表层盐度剖面;Ballabrera-Poy等[42]用Argo温盐资料,分别用气候态T-S关系、线性回归多项式模型和非线性回归神经网络模型进行东北大西洋上层1 200 m的盐度重构。结果表明,SSS资料为三维盐度结构提供了重要信息,尤其强调了卫星遥感SSS资料和温盐剖面资料的结合使用在三维盐度场重构中潜在的应用价值。
5 展 望
盐度作为海洋遥感领域的难点问题,当前的分析处理技术仍存在许多不足之处,尚需相关领域研究者的持续合作解决。截止目前,SMOS格点资料距0.1的目标精度仍有一定差距,其全球分布情况为:开阔海域具有较为连续的盐度空间分布,但仍有大片区域反演值欠精确,部分海域的盐度异常明显大于SSS的正常变率。通过数据筛选、时空平滑等L3数据处理可起到一定的改善效果,但L1,L2处理过程中的诸多问题仍未得到完善解决。
自2011-10起,ESA根据上述相关要点对L1和L2业务处理器进行了大规模的改进,称之为“再处理”,这是自SMOS业务处理器经过近两年的在轨校准验证后的首次大规模改动,是一个重要里程碑。随后CP34也会对所有经过再处理的L2数据进行重新加工,新格点数据于2012-02发布后进入下一轮的校准验证。试验中,经过再处理的SMOS数据与热带大西洋漂流浮标资料的初步对比显示[28]:SMOS给出了近似的SSS特征,但靠近陆地和海冰处上升和下降轨道的数据尚有较大差异,而在大洋南部有较低的SSS值,RFI的影响也很显著。由此可见,资料误差仍在一定程度上存在,未来需继续完善的工作包括:1) 寻找适应性强的OTT方法,或者可移除系统偏差和长期漂移的其他方法;2) 场景误差(如RFI和近陆污染)的移除或标记;3) 现有的粗糙度模型在大风环境下的效果仍然较差,且与海况、降水、星系信号等相联系的地球物理环境误差依然存在,需要进一步完善;4) 如何对视场区域、极化方式等进行最优选取和组合;5) 进一步改进、提高反演技巧。
此外,SSS作为海气相互作用的关键要素,对ENSO循环[43]、蒸发降水[44]等问题研究更是意义重大。随着SMOS产品精度的不断提高、业务运用不断成熟,高时空分辨率的遥感SSS资料将会进一步推进这些研究领域的全新发展。
致谢:感谢ESA提供SMOS L2产品、CP34提供SMOS L3产品;感谢BEC的Gourrion J的答疑解惑以及资料支持。
参考文献(References):
[1] QU X F. The European "soil moisture and ocean salinity" satellite has been launched [J]. Space International, 2009 (11) :1-3. 曲向芳. 欧洲“土壤湿度和海洋盐浓度"卫星升空[J]. 国际太空, 2009(11):1-3.
[2] KERR Y H, WIGNERON J P, BOUTION J, et al. The SMOS mission: New tool for monitoring key elements of the global water cycle [C]. Proceedings of the IEEE, 2010, 98(5): 666-687.
[3] SNYDER J P. An equal-area map projection for polyhedral globes [J]. Cartographica, 1992,29(1):10-21.
[4] ESA SMOS Team. SMOS L2 OS Input/Output Data Definition [EB/OL]. [2011-05-01].http:∥www.argans.co.uk/smos/docs/deliverables/delivered/IODD/SO-TN-ARG-GS-0009_L2OS-IODD_v2.18_101207.pdf
[5] CP34 GMV. SMOS CP34 Product Output Format Definition [EB/OL]. [2011-05-01].http:∥www.cp34-users.cmima.csic.es/light_web/documentation.do;jsessionid=AC2D1871B1EB6E1CE7043E1DC4302E05?idDL=CP34-PS-0001_v2.7d_2009-XX-XX.doc
[6] CHEN J, ZHANG R, WANG H Z, et al. The method and application of extracting SMOS salinity data based on hybrid binary-XML file format with Matlab[J]. Marine Science Bulletin, 2011,30(6):692-696. 陈建,张韧,王辉赞,等. Matlab对基于二进制-XML混合格式的SMOS盐度数据的提取方法与实现[J]. 海洋通报, 2011,30(6):692-696.
[7] ZINE S, BOUTION J, FONT J, et al. Overview of the SMOS sea surface salinity prototype processor [J]. IEEE Trans. Geosci. Remote Sens., 2008,46(3):621-645.
[8] MARQUARDT D W. An algorithm for least-squares estimation of non-linear parameters [J]. J. Soc. Ind. Appl. Math, 1963,11(2):431-441.
[9] WALDTEUFEL P, BOUTIN J, KERR Y. Selecting an optimal configuration for the soil moisture and ocean salinity mission [J]. Radio Sci., 2003,38 (3):8051-8066.
[10] SABIA R, CAMPS A, VALL-LLOSSERA M, et al. Impact on sea surface salinity retrieval of different auxiliary data within the smos mission [J]. IEEE Trans. Geosci. Remote Sens., 2006,44 (10):2769-2778.
[11] CAMPS A, VALL-LLOSSERA M, BATRES L, et al. Retrieving sea surface salinity with multiangular l-band brightness temperatures: Improvement by spatio-temporal averaging [J]. Radio Sci., 2005,40:1-13.
[12] ZINE S, BOUTIN J, WALDTEUFEL P, et al. Issues about retrieving sea surface salinity in coastal areas from smos data [J]. IEEE Trans. Geosci. Remote Sens., 2007,45 (7): 2061-2072.
[13] KLEIN L, SWIFT C. An improved model for the dielectric constant of sea water at microwave frequencies [J]. IEEE J. Ocean. Eng., 1977,2(1): 104-111.
[14] DINNAT E P, BOUTIN J, CAUDAL G, et al. Issues concerning the sea emissivity modeling at l band for retrieving surface salinity [J]. Radio Sci., 2003,38 (4):8060-8070.
[15] JOHNSON J T, ZHANG M. Theoretical study of the small slope approximation for ocean polarimetric thermal emission [J]. IEEE Trans. Geosci. Remote Sens., 1999,37(5): 2305-2316.
[16] GABARRO C, FONT J, CAMPS A, et al. A new empirical model of sea surface microwave emissivity for salinity remote sensing [J]. Geophys. Res. Lett., 2004,31:L01309-1: L01309-5.
[17] SABIA R, CAMPS A, TALONE M, et al. Determination of the sea surface salinity error budget in the Soil Moisture and Ocean Salinity Mission [J]. IEEE Trans. Geosci. Remote Sens., 2010,48(4):1684-1693.
[18] MARTIN-NEIRA M, CORBELLA I, TORRES F, et al. Overview: MIRAS instrument performance and status of RFI[R]. France: 1st SMOS science workshop, 2011.
[19] KAINULAINEN J, MARTIN-NEIRA M, CLOSA J, et al. Performance and stability of the SMOS reference radiometers - Status of investigations after 20 months of operation[R]. France: 1st SMOS science workshop, 2011.
[20] BROGION M, MACELLONI G, PETTINATO S, et al. Results of the Domex-2 experiment: Comparison between SMOS and Radomex data collected at Concordia base Antarctica[R]. France: 1st SMOS science workshop, 2011.
[21] FONT J, BOUTIN J, REUL N, et al. Status of Sea Surface Salinity product provided by SMOS[R]. France: 1st SMOS science workshop, 2011.
[22] MARTIN A, BOUTIN J, HAUSER D, et al. L-band radiometric measurements in the Gulf of Biscay[R]. France: 1st SMOS science workshop, 2011.
[23] MEIROLD-MAUTNER I, MUGERIN C, VERGELY J L, et al. SMOS ocean salinity performance and TB bias correction [R]. Austria: Proceedings of EGU General Assembly 2009, 2009.
[24] TALONE M, GOURRION J, GONZALEZ V, et al. SMOS' brightness temperatures statistical characterization [R]. USA: IGARSS 2010 proceedings, 2010.
[25] GOURRION J, SABIA R, PORTABELLA M, et al. Improving SMOS salinity retrieval: Systematic error diagnostic[R]. France: 1st SMOS science workshop, 2011.
[26] YIN X, BOUTIN J, MARTIN N, et al. Sea surface roughness and foam signature onto SMOS brightness temperature and salinity[R]. France: 1st SMOS science workshop, 2011.
[27] GUIMBARD S, GOURRION J, VENDRELL L, et al. SMOS Ocean Forward model: Roughness models improvement[R]. France: 1st SMOS science workshop, 2011.
[28] CP34 GMV. Detailed Processing Model for SMOS CP34 OS L3 Processors [EB/OL]. [2011-05-01].http:∥www.cp34-users.cmima.csic.es/light_web/documentation.do;jsessionid=AC2D1871B1EB6E1CE7043E1DC4302E05?idDL=CP34-DPM-0001-1-3_2008-11-04_DPMOS.doc
[29] OBLIGIS E, BOONE C, LARNICOL G, et al. Benefits of the future sea surface salinity measurements from SMOS generation and characteristics of SMOS geophysical products [J]. IEEE Trans. Geosci. Remote Sens., 2008,46(3):746-753.
[30] JORDA G, GOMIS D, TALONE M. The SMOS L3 mapping algorithm for sea surface salinity [J]. IEEE Trans. Geosci. Remote Sens. 2011,49(3):1032-1051.
[31] BRETHERTON F P, DAVIS R E, FANDRY C B. A technique for objective analysis and design of oceanographic experiments applied to MODE-73 [J]. Deep-Sea Res. I, 1976,23:559-582.
[32] JORDA G, GOMIS D. Accuracy of SMOS Level 3 SSS products related to observational errors [J]. IEEE Trans. Geosci. Remote Sens., 2010, 48(4): 1694-1701.
[33] GOURRION J, BALLABRERA J, ARETXABALETA A L, et al. Preliminary validation of SMOS products (Levels 3 and 4) [R]. USA: IGARSS 2010 proceedings, 2010.
[34] BOUTIN J, YIN X, MARTIN N, et al. Sea surface salinity from SMOS satellite and in situ observations: surface autonomous drifters in the tropical Atlantic Ocean[R]. France: 1st SMOS science workshop, 2011.
[35] JORDA G, GOMIS D. Toward SMOS L4 SSS products improving L3 SSS with auxiliary SSS data [J]. IEEE Trans. Geosci. Remote Sens., 2010, 48(5): 2204-2214.
[36] MUNOZSABATER J. Towards the assimilation of SMOS brightness temperatures at ECMWF[R]. France: 1st SMOS science workshop, 2011.
[37] LAGERLOEF G, KERR Y, ANTERRIEU E, et al. Simulating Aquarius by resampling SMOS and initial results from Aquarius data[R]. France: 1st SMOS science workshop,2011.
[38] BRASSINGTON G B, DIVAKARAN P. The theoretical impact of remotely sensed sea surface salinity observations in a multi-variate assimilation system[J]. Ocean Modelling, 2009,27(1-2):70-81.
[39] DELCROIX T, ALORY G, CRAVATTE S, et al. A gridded sea surface salinity data set for the tropical Pacific with sample applications (1950-2008) [J]. Deep-Sea Research I, 2011,58(1):38-48.
[40] HANSEN V D, THACKER W C. Estimation of salinity profiles in the upper ocean [J]. J. Geophys. Res., 1999,104(4):7921 7933.
[41] AGARWAL N, SHARMA R, BASU S, et al. Derivation of salinity profiles in the Indian Ocean from satellite surface observations [J]. IEEE Trans. Geosci. Remote Sens., 2007,4(2):322-325.
[42] BALLABRERA-POY J, MOURRE B, GARCIA-LADONA E, et al. Linear and non-linear T S models for the eastern North Atlantic from Argo data: Role of surface salinity observations [J]. Deep-Sea Research I, 2009,56(10):1605-1614.
[43] HENIN C, PENHOAT Y, IOUALALEN M. Observations of sea surface salinity in the western Pacific fresh pool: Large-scale changes during 1992 95 [J]. J. Geophys. Res., 1998,103(4):7523-7536,.
[44] CRAVATTE S, DELCROIX T, ZHANG D, et al. Observed freshening and warming of the western Pacific warm pool [J]. Clim. Dyn., 2009:33(4):565-589.
猜你喜欢
大气科学学报(2022年2期)2022-05-12 00:05:52
海洋通报(2020年2期)2020-09-04 09:22:34
海洋信息技术与应用(2020年2期)2020-07-27 01:42:02
热带海洋学报(2020年3期)2020-05-25 04:51:30
海洋通报(2020年6期)2020-03-19 02:10:08
成都信息工程大学学报(2019年5期)2019-05-21 00:46:28
广东海洋大学学报(2015年3期)2015-12-22 10:05:30
华南农业大学学报(2015年5期)2015-12-04 03:04:38
中国地震(2015年1期)2015-11-08 11:11:32
中国洗涤用品工业(2015年5期)2015-02-28 19:02:26