
缝纫机送料机构的可靠性设计
2013-11-05 05:46:06孟凡强
台州学院学报 2013年3期
孟凡强,张 莉
(台州学院 机械工程学院,浙江 台州 318000)
1 前言
缝制设备属于精密机械之一,要在一秒钟内完成100个左右的线迹[1],该线迹的形成是一个复杂的过程,主要由送料机构、勾线机构、挑线机构和刺料机构的运动配合来完成。在这4大机构中,送料机构是最重要、结构最复杂的机构,其作用是在完成线环形成过程的同时,周期性地递送缝料,其送布运动轨迹对送料性能有较大的影响,不良的运动轨迹将出现送布错位、缝料起皱和溜针等现象,从而影响缝制效果[1-2]。
本文采用矩阵法对送料机构进行水平送布台臂转动角度和送布牙前后运动量的理论计算,并采用动力学仿真软件ADAMS(Automatic Dynamic Analysis of Mechanical System)对送料机构的运动特性进行了仿真分析,最后对前后数据进行了分析比较,根据比较结果验证了送料机构的运动轨迹正确性,从而对送料机构设计的可靠性进行了评判。
2 送料机构工作原理
送料机构由电机驱动上轴,皮带带动下轴5,通过送布大连杆1、送布偏心轮2及送布调整轴3驱动送料轴4,然后由送料轴4的小幅摆动及抬布偏心轮6的转动带动送布牙7,进行送布牙送料,结构如图1所示。
本文对送料机构的运动进行分析,看其是否满足设计要求,从而判断送料机构设计的可靠行。
3 送布牙运动的理论计算
根据送布牙所要实现的运动,提取对其运动产生影响的相关零部件的装配组合,得到如图2所示的送布装置。

图1 送料机构结构图图Fig.1 Structure of feed mechanism

图2 送布装置Fig.2 Feed device
3.1 计算水平送布台臂转动角度
将此送布装置简化之后得到一个四杆机构,如图3所示。根据简化的四杆机构,进行水平送布台臂转动的角度分析。
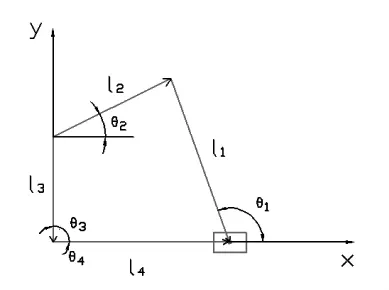
图3传动装置简化图Fig.3 Drive mechanism simplified diagram
采用矩阵法[3],该四杆机构构成一个封闭矢量多边形。在这个封闭矢量多边形中,其各矢量之和必等于零。即

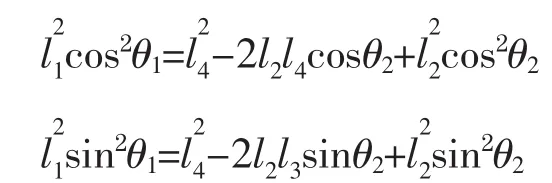
将式(1)向两坐标轴上投影,得

将 θ3=90°,θ4=0 代入式(2),得

将式(3)移项,得

式(4)两边平方,得
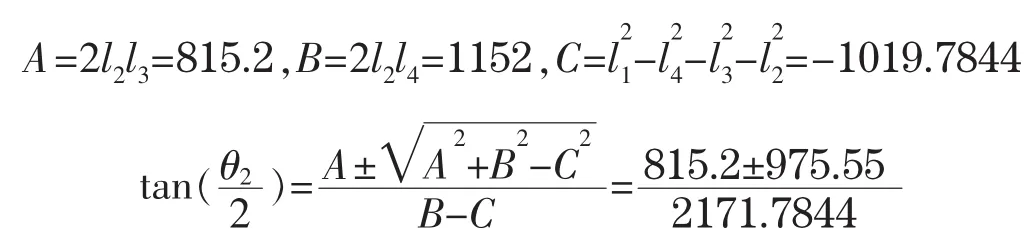
式(5)中两式相加,得

令

则式(7)可简化为
解得

图3中的相关尺寸为:l1=25mm,l2=20mm,l3=20.38mm,l4是滑块组件到送布轴的水平距离,该组件有两个极限位置,即滑块组件在切换器中移动最小值和最大值,两者差值即为8mm,即l4=28.8mm或l4=20.79mm。
(1)将 l1=25,l2=20,l3=20.38,l4=28.8 代入式(7),得
(2)将 l1=25,l2=20,l3=20.38,l4=20.79 代入式(7),得
根据机构的初始安装情况和机构运动的连续性确定式中θ2选取负号,则杆l2转动的角度为α=13.26°-8.422°=4.818°.
因此,滑块组件移动8mm后,水平送布台臂的运动转角为4.818°.
3.2 计算送布牙前后运动量
送布轴装置主要有送布轴、水平送布台臂、送布轴曲柄和送布牙等组成,如图4所示。它的主要作用是完成带动送布牙前后往复运动,并且与送布牙上下运动进行精确的配合。

图4 送布轴装置Fig.4 Feed shaft mechanism

图5 送布牙前后运动简化图Fig.5 Motion simplified diagram of feed dog
将送布轴装置进行简化,如图5所示。图中,l5水平送布台臂到送布轴两中心孔的垂直距离,送料机构中l5=22.1mm。
由于α=4.818°,推得x=1.86mm,即送布牙前后运动量为1.86mm.
4 送布牙运动的ADAMS分析
由于机构的运动学和动力学仿真分析技术是虚拟装配中的刚体建模与仿真技术的重要组成部分之一。因此,基于多刚体系统动力学进行机构运动学分析的方法完全能满足虚拟现实系统的实时性要求[4]。
ADAMS软件使用交互式图形环境和零件库、约束库、力库,创建完全参数化的机械系统几何模型,其求解器采用多刚体系统动力学理论中的拉格朗日方程方法,建立系统动力学方程,对系统进行静力学、运动学和动力学分析,输出为位移、速度、加速度和反作用力曲线闭[5]。
本文采用多体系统动力学进行送料机构的运动学分析。首先在SolidWorks平台下建立三维实体模型,基于Parasolid的数据交换,利用ADAMS的数据输入接口将送料机构三维实体模型导入ADAMS仿真分析环境中,并进行如下操作步骤:
(1)实体模型导入之后,检查模型在传输过程中是否出现数据丢失,图形失真等,根据检查结果,进行适当的修改。
(2)为了便于计算,对该模型进行了一些假设:各部件均视为刚体;相对固定不动的构件可视为一体;各构件材料属性均设置为steel。
(3)ADAMS/View模块主工具箱的约束副选项组里包括多种约束副类型,根据实际工作情况添加各构件之间的约束副。在各构件之间无相对运动的添加固定副或进行布尔运算中的合并操作,各构件之间有相对旋转运动的用旋动副连接,各构件之间存在相对移动关系的添加移动副连接。
(4)添加旋转驱动。最终得到送料机构的虚拟样机模型,如图6所示,整个传动机构包括:13个活动构件、6个固定副、8个旋转副、2个移动副和1个旋转驱动。设置仿真参数:转速为33r/s;End Time=50;Steps=100。仿真运动后,ADAMS/Solver模块自动形成送料机构系统模型的动力学、运动学的解算结果,通过后处理模块,得到送布牙质心的运动曲线,如图7所示。

图6 在ADAMS中的虚拟样机模型 Fig.6 Virtual prototype model in ADAMS

图7 送布牙运动曲线Fig.7 Motion trajectory of feed dog
5 数据分析比较
(1)送布轴装置中的水平送布台臂的运动角度曲线如图8所示,由图可知水平送布台臂转动角度的仿真结果为4.843o,理论计算值是4.818o,相对误差为0.338%。
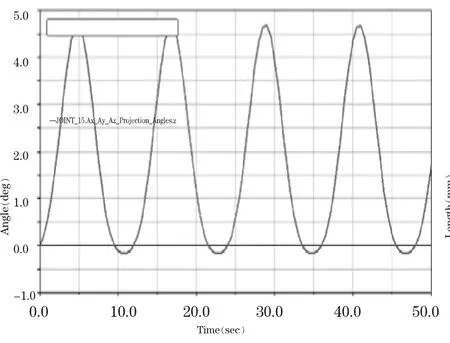
图8 水平送布台臂的运动角度曲线Fig.8 Rotation angle of feed rocker base arm

图9 送布牙Y方向运动量Fig.9 Y directional motion of feed dog
(2)送布牙的前后运动量的运动曲线如图9所示,由图可知送布牙的前后运动运动范围为1.986mm,理论计算的前后运动量为1.86mm,相对误差为6.774%。
通过两者数据比较,验证了送料机构的运动轨迹正确性,表明该送料机构是可靠的,能满足设计要求。
6 结论
本文采用矩阵法进行了水平送布抬臂的转动角度和送布牙的前后运动量的理论计算,并利用ADAMS对送料机构进行了运动学分析,最后两者的分析计算结果进行比较,验证了送料机构结构的正确性。
本文提出的方法有助于提高送料机构结构设计可靠性和工作性能,此方法已应用于59420三针平缝机的设计实践中。
[1]张青,邹慧君,郭为忠,等.闭合五杆缝纫机送料机构的运动仿真和轨迹优化[J].机械设计与研究,2004,20(6):25-28.
[2]闻力生,章文俊.工缝机的差动送料机构与缝纫性能[J].中国纺织大学学报,1991,17(2):49-53.
[3]王跃进.机械原理[M].北京:北京大学出版社,2009:162.
[4]刘检华,候伟伟,张志贤,等.基于精度和物性的虚拟装配技术[J].计算机集成制造系统,2011,17(3):595-604.
[5]葛正浩.ADAMS2007 虚拟样机技术[M].北京:化学工业出版社,2010:4.
猜你喜欢
空气动力学学报(2022年4期)2022-08-23 06:51:26
作文大王·笑话大王(2022年5期)2022-05-23 19:50:51
河北省科学院学报(2020年1期)2020-05-25 06:57:18
家庭科学·新健康(2019年8期)2019-09-17 08:17:04
制造技术与机床(2018年11期)2018-11-23 01:07:50
海军航空大学学报(2015年1期)2015-11-11 17:18:37
浙江大学学报(工学版)(2015年2期)2015-05-30 07:04:53
火炸药学报(2014年1期)2014-03-20 13:17:22
计算物理(2014年2期)2014-03-11 17:01:51
机械制造与自动化(2014年1期)2014-03-01 04:22:01
