面向内河雾天图像的大气光亮度值估算方法研究*
2013-11-04 06:54:40黄明晶熊燕帆郭建明
交通信息与安全 2013年3期
黄明晶 刘 清 熊燕帆 郭建明
(武汉理工大学自动化学院 武汉 430070)
0 引言
对于大多数内河闭路电视(closed circ-uit television,CCTV)监控系统而言,户外恶劣天气是造成图像降质的重要原因,而能见度较低且频繁出现的雾、霾天气,是影响图像或视频质量的重要因素,这使得图像质量严重退化,从而影响了图像信息的获取,因此研究视频图像的去雾有非常重要的意义。
目前去雾的方法可以分为2类:基于非模型的图像去雾方法,称为图像增强;基于模型的图像去雾方法,称为图像复原。通常图像增强方法按照特定的需要,突出图像中感兴趣的信息,同时去除不需要的信息,从而提高图像对比度和辨识度,但并不能增强图像的细节信息。图像复原方法是把退化现象模型化,采用逆运算处理,补偿退化过程造成的失真,从而获得未经干扰的原始图像,实现场景复原并改善图像质量。
但内河场景复杂、内河图像颜色偏暗,尤其一般情况下天空和水面区域占内河图像的2/3,而图像增强采取的方式都是降低图像动态范围或增强对比度,对内河图像采用此方法去雾会造成内河图像曝光过度,图像对比度和色彩度失真,因此,对内河图像去雾多采用图像复原的方法。在对内河图像去雾复原的过程中,根据大气散射模型可知,大气光亮度值是复原图像的重要参数之一,所以大气光亮度值的估算会直接影响到图像复原的质量。目前对大气光亮度值的估算方法主要是以选取图像全局亮度最大值的方式。但由于内河图像受河面的影响,图像中全局最亮的区域可能分布在近景中的白色物体或河面附近,而不是天空雾最厚的区域。因此通过选取图像全局亮度最大值的方式对大气光亮度值的估算方法不够准确。
针对大气光难于估算和内河图像所具有的独特性,本文通过对不同大气光亮度值估算方法的研究和分析比较,对内河有雾图像的反复实验,提出一种基于RGB空间及K均值聚类的自动提取天空区域的大气光亮度值估算方法。实验表明本文的方法能获得较准确的内河视频图像天空区域及估算大气光的亮度值。
1 雾天图像成像模型
McCartney[1]根据Mie散射理论提出的大气散射模型,是目前计算机视觉及图像处理领域最常用的模型。根据McCartney模型的描述,雾天时大气散射模型中衰减模型和大气光成像模型同时存在且起主导作用,正是由于两者同时作用,才导致目标图像的对比度和分辨率降低。因此,雾天户外视觉传感器上接收到的总辐射度(总强度),可以等效成入射光经大气衰减后到达传感器的景物辐射光,和周围环境中的各种散射光进入成像系统后的线性叠加,即

等式右边的第1项是直接衰减项,描述了场景目标反射光在介质中衰减的结果;等式右边的第2项是大气光,反映了全局大气光的散射导致杂散光成像情况,是大气光产生的亮度,会导致图像景物颜色的偏移;E0为晴朗天气下的场景点的辐射亮度;E为有雾天气下的场景点的辐射亮度;E∞为大气光;β为大气散射系数;d为场景的深度,即景深。要对雾天降质图像进行去雾即求解E0。
对RGB图像的每个通道来说,有

由式(1)和式(2)可知,雾天条件下,场景点的色彩度和对比度与景深呈指数衰减,有雾图E 与无雾图E0和大气光E∞是成比例函数的,e-βd可以看成是E0和E∞的比例系数。显然,e-βd仅与景深有关,当e-βd不变时,E∞的变化将直接影响E0的求解。所以大气光E∞的准确程度将会对图像复原的结果起着至关重要的作用。
2 大气光亮度值的估算方法
针对户外雾天大气光亮度值估算方法的研究,一般都是先确定天空区域,然后再估算大气光的亮度值。天空区域的分割主要有人工选取天空法,位平面法,最佳近似正态分布法和爬山法等。人工选取天空区域是通过人机交互的方式将天空区域分割出来[2-4],然后将区域内的平均亮度值作为大气光亮度值。这种方法虽然在视觉上基本与主观感觉一致,但必须要人工干预,所以在视频图像的智能去雾研究中存在一定的局限。以下重点分析位平面法,最佳近似正态分布法和爬山法。
1)位平面分解法。由于8位灰度图像存储时占1字节,8位二进制表示,其中的每一个比特可看作表示了1个二值的平面,即位平面,位平面分解就是将一幅8位的灰度图像分解成一系列的二值图。秦武[5]等认为在气溶胶强烈的前向散射作用下,太阳周围的天空特别亮,即日周光。日周光的光晕是正对着太阳光的方向呈圆环状,如果能够检测到日周光的位置,就能确定天空的亮度及发射光源的中心。通过对大量浓雾远景图像进行分析得到,80%以上的雾天降质图像都会产生明显的日周光光晕[6],见图1。
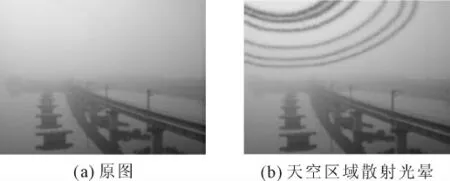
图1 内河雾天图像的日周光光晕Fig.1 Ambient light halo of inland haze image
秦武等利用位平面分解辨别出相近区域的相似像素点,来确定雾天降质图像的日周光。由于位平面分解图的高位包含图像的结构部分,低位包含图像的细节部分,所以通过取高位格雷码位平面分解图能够很容易地分割天空区域。再利用最小二乘椭圆拟合散射光晕的中心获取天空的亮度值,最后取天空区域的亮度均值与日周光光晕中心亮度值的加权值作为最终的大气光亮度值。该方法能够得到图像明显的日周光光晕的光圈,但获取的光圈只包含了部分天空区域,因此对大气光亮度值的估算不够准确,且运用椭圆最小二乘法对光晕光圈拟合获得光晕中心的算法比较耗时,图像处理速度较慢。
2)最佳近似正态分布法。正态分布是一种具有2个参数:均值μ和方差σ的连续型随机变量的概率分布,其随机变量落在[μ-2σ,μ+2σ]的概率为95%左右,一幅雾天图像中天空区域的灰度范围可近似认为是满足正态分布。最佳近似正态分布法就是将雾天图像灰度值分布在[μ-2σ,μ+2σ]范围内的区域分割出来,即为天空区域。
祝培[7]等认为雾对光线具有较强的散射作用,雾天图像中天空区域的亮度值应该比较高(灰度级较高),虽然天空区域的亮度值不是一个恒定的常值,但其灰度级都在一定的范围内并且相对比较集中,根据对雾天退化图像的统计分析,天空区域的灰度应该近似满足正态分布,灰度直方图的形状类似一个“陡峰”,见图2。

图2 内河雾天图像的灰度直方图Fig.2 Gray histogram of inland haze image
祝培等提出的一种最佳近似正态分布的搜索算法步骤为:首先从右向左扫描图像的灰度直方图,记录最高峰值点坐标,并将该点横坐标作为初始正态分布的灰度均值μ;其次,根据获得的灰度均值、峰值和初始方差σ给定一个初始正态分布;最后,通过计算初始正态分布与灰度分布曲线的偏差,当偏差最小时,此时得到的以μ为均值、以σ为方差的正态分布即为最佳近似正态分布。根据正态分布的概率分布性质及天空区域的灰度分布范围,利用阈值分割来分割出天空区域。该方法能较好地提取天空区域,但对于天空区域灰度分布曲线不满足正态分布曲线的图像,此方法并不适用,因此该方法适用范围有一定的局限性。
3)爬山法。爬山法是指经过评价当前的问题状态后,向着数值(亮度值、函数值等)增加的方向持续移动的简单循环过程,直到到达一个“封顶”时终止,此时相邻状态中没有比该“封顶”更高的值。就如同爬山一样,为了到达山顶,有时不得不先上矮山顶,然后再下来,这样翻越一个个的小山头,直到最终达到山顶。许志远[8]等根据雾天降质图像天空区域直方图的统计特性发现,天空区域灰度值往往较高,并且分布相对集中,可做分割处理,因此提出了一种基于爬山法的天空区域自动分割算法。
该算法是一种启发式搜索算法[9-10],通过寻找直方图灰度级像素数增加的方向,并将其作为搜索方向,这样就能以最快的速度爬到山顶,即灰度直方图的峰值点。按照上山的方向反复进行爬山,直到直方图所有非零灰度级都进行过爬山,搜索停止。然后确定并记录峰值点的数量,再选取2个最大的峰值点,将其他灰度级与之相连构成相应的区域,最后计算2个区域内的灰度级均值,确定灰度级最高的区域为天空区域。该方法在分割天空区域的算法速度上较快,但提取的天空区域不完全,且受内河图像河面的影响,平均灰度级最高的不一定是天空区域,会造成对大气光的估计不够准确。
针对这些情况及大气光选取区域难于确定这一问题,本文通过对内河雾天图像的分析研究,给出基于RGB空间及K均值聚类自动提取天空区域的大气光亮度值估算方法。
2.1 K均值聚类的分割算法
大气光应该是雾最浓的区域,对应位置为天空或无穷远处。天空区域往往位于图像的上部,则使用天空线最远处的中心坐标作为天空区域的初始聚类中心X1(xr1,xg1,xb1),另外再选取1个远离天空区域的像素点作为第2个初始聚类中心X2(xr2,xg2,xb2),则图像各像素点到这2个聚类中心的距离为

式(3)和(4)是一个欧几里得距离函数,作为聚类的相异度。比较d1和d2的大小,将图像像素点归到离它最近的那个聚类中心所在的类。计算新形成的2个聚类的数据对象的平均值来得到新的聚类中心X′1(x′r1,x′g1,x′b1)和X′2(x′r2,x′g2,x′b2),如果相邻2次的聚类中心没有任何变化,说明分类调整结束,聚类准则函数已经收敛。一旦图像中全部像素点都被分配到相应的聚类中,每个聚类的聚类中心会根据聚类中现有的对象被重新计算。
这个过程将不断重复直到满足下一终止条件中任何一个:①没有(或最小数目)对象被重新分配给不同的聚类;②没有(或最小数目)聚类中心再发生变化;③误差平方和局部最小。
具体实现步骤如图3所示。
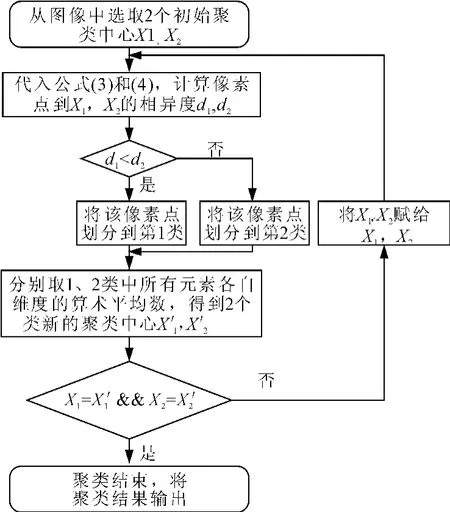
图3 K均值聚类分割天空流程图Fig.3 K-means clustering segmentation sky flow chart
根据以上分类结果可得,聚类中心为、,图像被分为2类,其中1类为天空区域,2类为非天空区域。将天空区域的3个通道的亮度值进行加权混合得到天空区域的亮度均值:

式中:lmed为天空区域的亮度均值;lr,lg,lb分别为RGB 3个通道的天空区域亮度值;num为天空区域的总像素数。
2.2 大气光亮度值的估算
一般情况下,聚类中心周围为雾最浓的区域,对大气光亮度值的估算起主要作用,为提高算法的鲁棒性,采用聚类中心的亮度值与天空区域的亮度均值加权的形式作为最终获得的大气光亮度值,即:

式中:E∞,l0,lmed分别为最终大气光亮度值、聚类中心亮度值和天空区域亮度均值;α一般取0.6~0.8。
3 实 验
为了验证本文算法对内河雾天图像大气光亮度值估算的有效性和准确性,本文选取从长江内河航道上采集到的若干天数百幅雾天图像作为实验素材,图像大小为1 280×960,采用本文介绍的目前常用的位平面法、最佳近似正态分布法、爬山法和文本提出的K 均值聚类方法来估算天空亮度值。图5~8中黑色部分为提取的天空区域。图4为选取的4幅内河雾天图像。图5为位平面分解法提取天空区域的结果,显见提取的天空区域不够完全。图6为最佳近似正态分布提取天空区域的结果,显见出现将河面也当成天空区域;图7为爬山法提取天空区域的结果,显然也出现将河面也当成天空区域,提取效果不理想;图8为本文提出的K 均值聚类方法自动提取天空区域的结果,提取的天空区域较完全,效果较好。图9(a)、(b)是本文作者在实验中选取的70幅一般户外不同浓度雾图中的任意5幅雾图,及采用本文方法提取天空区域的效果图,从图9(c)、(d)可见本文方法也适用一般的户外雾图的天空区域提取,但对于浓雾图(如图9(b))本文方法提取的结果仍然有误差,如图9(d)2幅图中白色椭圆框,非天空区域也被提取。根据以上实验结果可见,本文方法适合于内河图像,在自动提取的效果较精确,获得的大气光亮度值将更加准确。对于浓雾图提取天空区域的效果不准确是需要进一步研究的。

图4 内河雾图Fig.4 Inland haze images

图5 位平面分解法提取的天空区域Fig.5 The sky area from a plane decomposition method

图6 最佳近似正态分布法提取的天空区域Fig.6 The sky area from the best approximation normal distribution method

图7 爬山法提取的天空区域Fig.7 The sky areafrom hill-climbing method

图8 本文K均值聚类方法提取的天空区域Fig.8 The sky area from k-means clustering method

图9 户外雾图及本文方法获取的天空区域结果Fig.9 Outdoor haze images and the paper’s results of extracting sky
4 结束语
如何在不降低内河雾图原有清晰部分质量的条件下,将受雾影响区域的细节部分清晰化是现阶段内河图像复原领域的关键问题。由于大气光亮度值的估算直接影响到图像复原的质量,本文针对这一问题,通过对已有大气光亮度值的估算方法进行分析讨论,给出一种新的相应解决办法,即提出对雾天内河图像进行K 均值聚类分割出天空区域,并得到雾最浓区域的中心,将此中心的亮度值与天空区域的亮度平均值进行加权,从而获得最终的大气光亮度值,实验结果证明了本文算法的有效性和准确性。本文下一步工作将对不同浓度雾对光照的衰减和不同光照度下的雾图进行实验分析,研究如何提高浓雾图提取天空区域的准确度并使其能应用于内河视频去雾。
[1]嵇晓强.图像快速去雾与清晰度恢复技术研究[D].长春:中国科学院研究生院(长春光学精密机械与物理研究所),2012.
[2]王欣威,李 颖,董慧颖,等.基于大气模型的天气退化图像复原方法及应用[J].沈阳理工大学学报,2005,24(1):32-35.
[3]王志坚.基于大气模型的图像复原改进算法及应用[J].计算机工程与应用,2007,43(3):239-248.
[4]Narasimhan,Srinivasa G.Chromatic framework for vision in bad weather[J].IEEE Conference on Computer Vision and Pattern Recognition.2000(1):598-605.
[5]秦 武,陈从平,王 建,等.基于位平面分解的自动提取去雾算法[J].三峡大学学报,2011,33(2):104-107.
[6]葛君伟,谢祥华,方义秋.雾天图像清晰化方法及应用[J].重庆邮电大学学报:自然科学版,2010,22(2):223-226.
[7]祝 培,朱 虹,钱学明,等.一种有雾天气图像景物影响的清晰化方法[J].中国图象图形学报,2004,9(1):124-128.
[8]许志远.雾天降质图像增强方法研究及DSP实现[D].大连:大连海事大学,2010.
[9]Takumi Ohashi,Zaher Aghbari,Aki-fumi Makinou-chi.Fast segmentatio-n of texture image regions based on Hill-Climbing[C]∥Proceedings of IEEE Pacific Rim Conference on Communic-ation,Computersandsignal Processing.Japan Fukuoka:Kyushu University,2003.
[10]Luis Rueda,Vidya Vidyadharan.A hill-climbing approach for automatic gri-dding of cDNA microarray images[J].IEEE/ACM Transactions on Compution-al Biology and Bioinformatics,2006,3(1):72-83.
猜你喜欢
阅读(科学探秘)(2021年10期)2021-03-08 10:16:50
水上消防(2019年3期)2019-08-20 05:46:06
成都信息工程大学学报(2018年1期)2018-05-31 08:40:27
重庆交通大学学报(自然科学版)(2017年3期)2017-05-17 03:37:30
环球市场信息导报(2016年41期)2017-01-19 09:26:54
中学生数理化(高中版.高二数学)(2016年4期)2016-03-01 03:46:15
船海工程(2015年4期)2016-01-05 15:53:28
交通科学与工程(2015年1期)2015-12-23 11:08:15
湖北师范大学学报(自然科学版)(2015年3期)2015-12-05 03:15:47
中国航海(2014年1期)2014-05-09 07:54:27