电动车行驶控制器智能测试系统
2013-10-31 06:49李保安施国梁
通信技术 2013年6期
李保安,施国梁
(苏州大学 电子信息学院,江苏 苏州 215006)
0 引言
电动车行驶控制器是整个电动车的核心控制 部分,它要处理各种用户输入信息,根据输入信息内容的不同,来控制车辆的前进,后退,停车状态;由于电动车行驶控制器的重要性,所以要对其各项功能模块进行测试;传统电动车行驶控制器测试方法主要是车载测试,测试人员要手动对行驶控制器进行各项功能模块测试;但受到人为因素的影响,导致测试数据不够准确,测试效率低,测试数据不能有效保存等问题。鉴于此,提出一种新的基于PIC81F65J10单片机的测试终端和PC软件的电动车行驶控制器智能测试系统[1-3],通过对行驶控制器各模块进行仿真模拟,从而实现电动车行驶控制器的高效、准确、智能化测试。
1 行驶控制器智能测试系统概述
行驶控制器需要测试的模块有:大灯、指示灯、油门输入及用户输入按键面板等。行驶控制器智能测试系统仿真行驶控制器所有输入模块,对行驶控制器反馈来的信息采集加以判断实现对其测试。模块仿真模拟采用 TS5A3359,TS5A22362模拟选通芯片和相应外围电路组合完成。
为了实现测试的高效、准确、智能化,系统采用测试终端和PC软件组合的结构,系统框图如图1所示。测试终端[4]要完成所有行驶控制器外围模块仿真,并且要根据 PC软件的测试指令完成对行驶控制器的测试。 PC软件是一个人机交互界面[5-6],它的作用是给测试终端发送测试指令,并对返回来的数据进行保存。
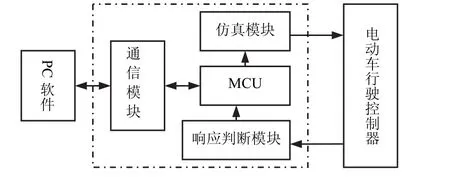
图1 系统框
2 测试系统功能实现介绍
行驶控制器智能测试系统由终端和 PC软件两部分组成,接下来将对各模块详细介绍。
2.1 系统仿真模块电路设计
2.1.1 微处理器设计
主控芯片采用 Microchip公司的PIC18F65J10单片机,该单片机将大量的外围模块整合到单片机内,包括看门狗、两个串行通讯口、11个10位A/D转换器、4个定时器等,同时具有128KB的ROM和3936B的RAM,足够满足系统要求,且该单片机具有简单实用、成本低、抗干扰能力强、功耗低等特点。单片机外围电路如图2所示。
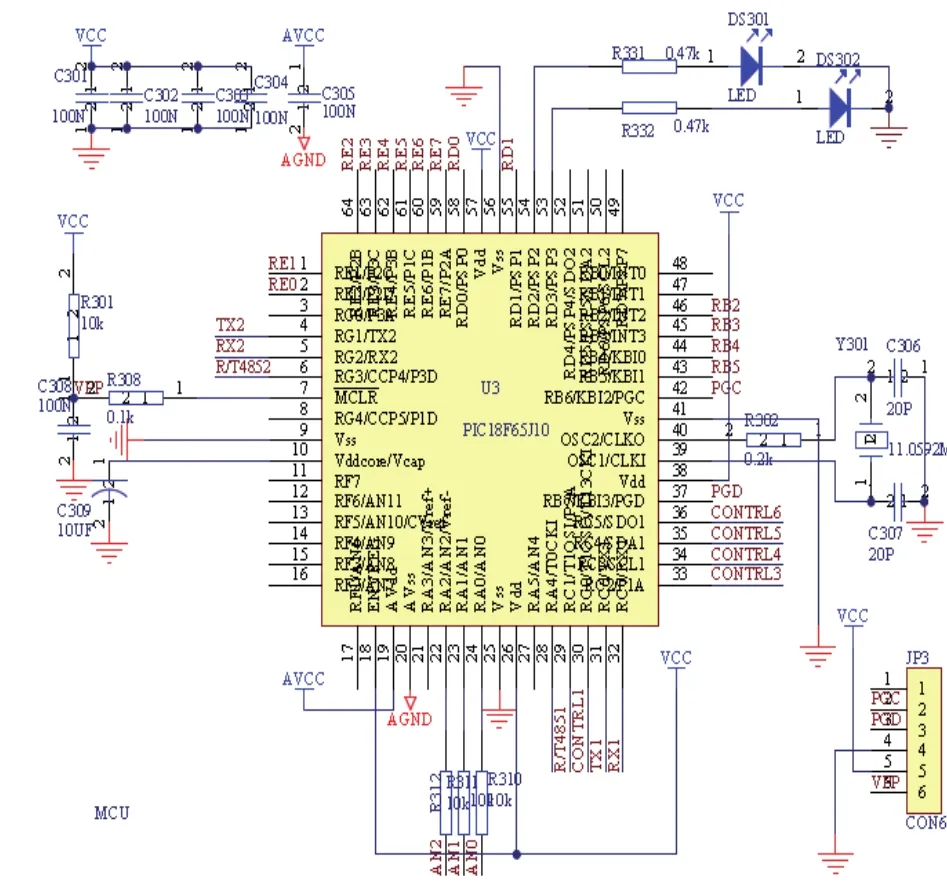
图2 CPU外围电路
2.1.2 大灯、指示灯模拟电路
测试终端和行驶控制器间是通过图3中的14脚接口连接,实现供电、通信、电压采集。因为每个指示灯开关有3个状态:断开、左指示灯开、右指示灯开,所以选择图4中的TS5A3359单刀三掷模拟开关实现,MCU控制 IN2,IN1引脚电平实现NO0,NO1中一路和COM导通,即实现了左右指示灯中的一个打开,图5是指示灯开关接口电路,将开关信号传递给行驶控制器。MCU采集图3中AN0,AN1,AN2点的分压电压可以判断行驶控制器中的指示灯大灯电路好坏。
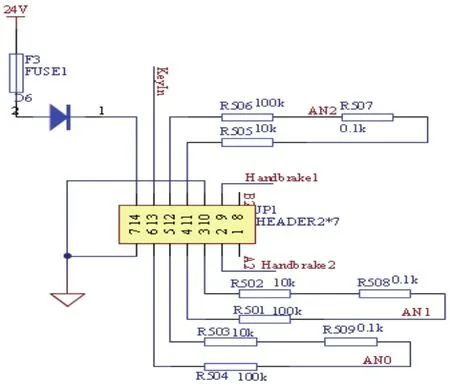
图3 测试接口
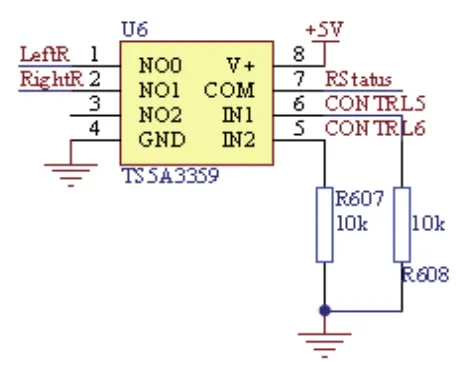
图4 指示灯模拟电路
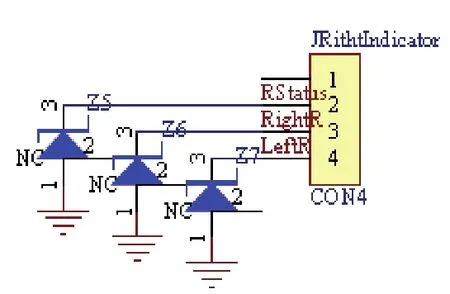
图5 指示灯开关接口电路
2.1.3 按键面板模拟电路
按键面板上的按键有∶ 喇叭键、故障指示键、紧急停车键、LED显示切换键、大灯键等。这些按键只有通断两个状态,所以选择图6中TS5A22362单刀单掷双路模拟开关实现,MCU控制IN引脚的电平使NO和COM脚通断,实现按键的模拟。每个芯片上可以实现两路按键的模拟。

图6 按键模拟电路
当测试某个按键时,行驶控制器会返回一个状态信号给测试终端,由此可以判断按键的电路的好坏。
2.1.4 油门输入模拟电路
油门输入相当于一个5 kΩ的电位计对5 V进行分压,当油门处于中间位置时即电位计处于中间值2.5 kΩ(2.5 V)处时,电动车处于停车状态;当手动油门器的电阻值大于2.5 kΩ(2.5 V)时车辆处于后退状态,偏离2.5 kΩ(2.5 V)越多,车辆后退的速度越快,当到达最大值时,车辆的后退速度最快;当手动油门器的电阻值小2.5 kΩ(2.5 V)时车辆处于前进状态,偏离2.5 kΩ(2.5 V)越多,则车辆前进的速度越快,当到达最小值时,车辆的前进的速度最快。
图7中4个10 kΩ电阻(R622,R615,R616,R617)对5 V进行分压,NO0、N01、NO2分别代表后退、停止、前进3个状态;图8中CON4接口和行驶控制器上的加速器接口相连;MCU控制IN1,IN2电平输入,实现对行驶控制器的加速器3个状态的模拟输入;测试终端通过行驶控制器返回来的状态信息来判断加速器电路的好坏。

图7 油门模拟电路
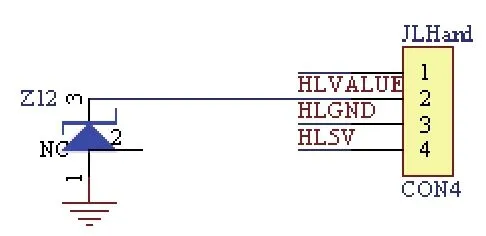
图8 油门接口电路
2.1.5 RS485通信
此系统中采用的串口通信方式是RS485总线[7],因 RS485具有良好的抗噪声干扰性,长的传输距离和多站能力等,上述优点就使其成为首选的串行通信方式。利用RS485电平转换芯片(SN65 HVD11),将很容易组成RS485总线,其电路如图9所示。
该芯片的两个收发允许位(RE,DE),让主单片机很好的控制半双工的工作节奏,实现数据的发送和接收。测试终端和 PC测试软件之间采用的通信方式是7个字节的数据帧,如图10所示。为了保证通信过程中的数据准确性,数据帧采用7个字节,1个同步字Syn(0XBB),提供数据帧的起始位置,1个指令字节CM0,3个数据字节DA0,DA1,DA2,两个校验位CRL,CRH。通过Syn和CRH,CRL可以使通信数据正确率有很大提高,保证测试数据的准确性。

图9 RS485通信电路

图10 通信协议
2.1.6 系统流程图
该系统采用模块化设计,以便提高程序执行效率,便于调试和扩展,流程图如图11所示。

图11 系统流程
2.2 PC测试软件
PC测试软件是基于C#窗体应用[8]开发的测试界面,内部关联了ACCESS数据库,实现数据的保存。为了保证测试系统的易操作性,测试界面采用按钮加图标的方式,用户只需点击界面上的测试按钮就能完成测试,并且通过旁边的图标变化来更直观判断测试是否通过。PC软件和测试终端之间通信采用半双工方式,终端只有在接收到 PC软件测试指令后才执行测试并返回数据给 PC软件,保证了测试的准确性,且每一测试项都能在200 ms内完成,测试效率有很大提高。PC软件如图12所示。下面对软件界面进行详细描述:
①测试界面
测试界面上包含要测试的所有项,每个测试按钮旁边有一个图标,没测试前图标是,当点击测试按钮通过测试后,图标会变成,否则保持。
②数据保存
当所有项都测试通过后输入产品序列号(Serial Number)测试人员姓名(Tester Enginner),点击Save按钮保存数据Access数据库中。如果测试过程中遇到测试未通过产品,点击Reset按钮恢复初始测试界面,继续下一个产品的测试。
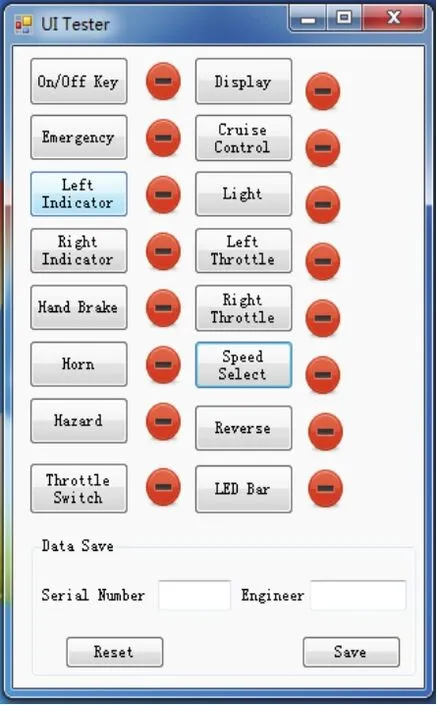
图12 PC测试软件
3 试验结果
测试场景:车间生产线,测试产品样本数为2000。
用电动车行驶控制器对2000个行驶控制器样本进行测试,检测出10个不合格产品。
对这2000个样本产品进行实际车载测试,测试结果和用电动车行驶控制器智能测试系统测试的结果一致,由此验证电动车行驶控制器智能测试系统测试正确率100%。
4 结语
通过对测试系统的实际测试实验结果的研究,验证了此测试系统[9]在电动车行驶控制器产品测试过程中具有很好的准确性,对进一步将此测试系统应用到大规模产品测试中具有重要指导意义。
[1]李胤昌,郑日荣.基于PIC单片机的电动自行车控制系统设计[J].元器件与应用,2009(08):136-138.
[2]李路,严明,何友国.基于PIC单片机的无线报警系统设计[J].通信技术,2011,44(03):48-50.
[3]梁燕,唐超,李伟.嵌入式软件测试系统设计与实现[J].信息安全与通信保密,2009(11):72-75.
[4]周忠海,高金魁.基于PIC单片机的测试记录仪[J].商品储运与养护,2008,30(08):107-108.
[5]黎松奇.基于.Net平台的通用自动测试系统设计[J].自动化与仪器仪表,2011(11):37-41.
[6]杨文,黄文涛.通用自动测试系统的软件设计与实现[J].工业控制计算机,2012,25(01):79-83.
[7]郑文争,王旭阳.基于RS-485串行口的远程实时信号传输设计[J].通信技术,2007,40(05):18-19.
[8]张淮鑫,匡松,杜小丹,等.C#开发宝典[M].北京:中国铁道出版社,2010.
[9]王珺吉,章立,汪松,等.电磁泄漏自动检测系统设计实现[J].信息安全与通信保密,2011(01):81-82.
猜你喜欢
电子制作(2021年3期)2021-06-16
岷峨诗稿(2020年4期)2020-11-18
汽车电器(2018年8期)2018-08-25
数码世界(2018年7期)2018-08-11
电子制作(2016年1期)2016-11-07
汽车之友(2016年10期)2016-05-16
汽车维修与保养(2014年12期)2014-04-18
自动化博览(2014年12期)2014-02-28
汽车维护与修理(2014年10期)2014-02-28
中国医药指南(2012年11期)2012-01-26