全球导航定位系统接收机的跟踪环路带宽设计
2013-10-22 02:04:28李文联雷玉洁章振保
武汉工程大学学报 2013年3期
李文联,雷玉洁,,金 璐,章振保
(1.湖北文理学院物理与电子学院,湖北 襄阳 441053;2.武汉工程大学电气信息学院,湖北 武汉 430074)
0 引 言
随着无线通信的发展,出现了多种模式的通信体制,为了满足互通性的问题,软件无线电的思想被提了出来.而软件接收机则以它的灵活性、可扩展性、经济等优点成为当前研究的热点问题,并在过去的十几年中,有很多的外国学者对软件接收机作过研究,取得了长足的进步.2000年,James B Y T写过一本书来介绍全球导航定位系统(Global Positioning System,以下简称:GPS)软件接收机的系统结构、信号的捕获及跟踪算法的细节,并且还提出了一种新的信号跟踪方法——同步信号块调整[1](Block Adjustment of Synchonizing Signal,以下简称:BASS).随后,美国康奈尔大学的诸多学者在CPU为ADM1.73G的PC机上实现了实时多通道的单频GPS软件接收机;意大利的都灵理工大学的Fabio Dovis等人在以现场可编程门阵列(FPGA)及数字信号处理(DSP)为主要运算器件的平台上实现了GPS基带信号的实时处理等.
本文介绍了GPS软件接收机的基本结构,捕获及跟踪的基本原理及思路,采用了并行码相位搜索算法,实现了对GPS信号的捕获,并且利用最优化的设计理念,设计了接收机的最优环路带宽,最后做出了相应的仿真和验证.
1 GPS软件接收机的结构
GPS接收机主要包括了五个部分:天线、射频前端模块、模数转换模块、信号通道处理模块和定位解算模块.对于天线接收到的所有卫星射频信号,其中当然也混杂有一些干扰信号,首先要经过滤波和放大处理,当信号放大到合适的幅度后才送入到下变频器,继而在下变频器中与本机振荡器的信号进行多级混频,并把射频转换到合适的频率,变为中频信号,最后再由模数(A/D)转换器将输入信号数字化.接下来将采集到的各路数字中频信号传入通道作预处理,以实现最终的定位解算.GPS软件接收机的结构[2]如图1所示.

图1 GPS软件接收机结构图Fig.1 Structure of GPS software receiver
图1各个模块中,接收机的核心部分是若干并行的数字接收通道,每个通道对应一路卫星信号,并在其中对所有卫星信号进行具体的解调与解扩操作,实现载波同步与码同步、给出导航数据等.同步的过程有两个:捕获和跟踪,信号的捕获实现的是对信号的载波频率和伪码码相位的粗略估计,可以通过捕获电路对载波频率和码相位的二位搜索来完成,当达到捕获门限后,载波和伪码必须持续不断的动态调整,以达到精同步;信号跟踪的本质就是为实现对信号的稳定跟踪而采取的一种对环路参数的动态调整策略,最后得出导航数据.
2 GPS信号的捕获及跟踪
GPS接收机采集到的信号可能是来自所有码分多址(Code Division Multiple Access,CDMA)系统信号源的混合信号,从混合后的信号中分辨出视界范围内的各颗卫星,并对信号的载波频率和伪码码相位做一个粗略估计才是信号捕获的目的.
串行捕获、并行频率空间捕获和并行码相位捕获是信号捕获常用算法.串行搜索算法存在两个不同的扫描过程,它涉及到对频率范围的搜索和1023种不同码相位的搜索,因此搜索范围非常大且比较耗时;并行频率空间搜索算法则只是对1023个不同的伪码相位进行搜索,但每一伪码相位都需要作频域的变换,存在较大的计算量;并行码相位搜索算法进行的是频率上的搜索,并行计算码相位,这样就将搜索空间消减为41个不同的载波频率,大大减小了计算量,故在设计中重点考虑并行码相位搜索算法.其原理[3]如下:
对于两个长度有限且均为N,并且具有周期重复特性的序列x(n)和y(n),其循环互相关序列为

去掉比例因子1/N,z(n)的N点离散傅里叶变换为

公式(2)中:X*(k)为X(k)的共轭形式.
根据公式(2),对41个频率的本地码分别作2次快速傅里叶变换(Fast Fourier Trsnform,以下简称:FFT),1次逐点相乘和1次快速傅里叶逆变换(Inverse Fast Fourier Trsnform,以下简称:IFFT)运算,可以较快的确定本地信号与原始的GPS信号相互间的关系,从而较快获得了多普勒频率的初始值,以及C/A码(Coarse/Acquisition Code)的起始位置.这样运算量得到了大大的减小,搜索时间也缩短了,实现过程如图2所示.

图2 并行码相位搜索算法框图Fig.2 Chart of parallel code phase search acquisition注:I-同相;Q-异相
信号跟踪的本质是为实现对信号的稳定跟踪而采取的一种对环路参数的动态调整策略,它具有两个目的:一是伪码分量的跟踪,解扩卫星信号,同时将伪距观测量从C/A码或P码(Precise Code)中提取出来,从而得到只有导航电文调制的载波信号,此过程中通常采用非相干延迟锁定环来实现;二是载波分量的跟踪,解调伪载波信号,对载波相位进行估计,获得导航电文信息,并将多普勒频移观测量提取出来,此过程中采用的是科斯塔斯环来实现的.载波跟踪环和码跟踪环都属于数字环路,它们的基本结构是相同的,只是环路鉴别器的算法以及环路的设计不一样.接收机的跟踪环路基本结构图[4]如图3所示.
3 GPS跟踪环路带宽设计
对于GPS接收机跟踪环路的带宽选择,需要考虑以下两方面的因素:一是受到热噪声或干扰的影响,跟踪带宽要求要窄;二是考虑到载体动态性能的影响,跟踪环路带宽要求要宽.为兼顾两方面的影响,就需要折中考虑环路的带宽.最优带宽[5]是输入信噪比和载体动态性的函数,根据估计的信噪比来确定最优带宽以达到总的误差最小,延迟锁定跟踪环的误差σDLL为:


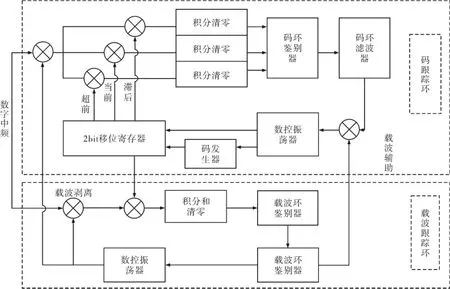
图3 GPS接收机跟踪环路结构图Fig.3 Design scheme for GPS tracking loop
则码环跟踪最优带宽为:

求其导数得:

利用载波跟踪环辅助码跟踪环来实现跟踪,主要是由于载波跟踪环即便是在宽的带宽条件下,精度也相对很高,并且在这种情况下,载体动态引入的误差很小,几乎可以忽略不计.
4 仿真结果
对所提出的算法,进行了实验验证,搜索及跟踪算法的验证结果如表1和图4所示.表1显示的是捕获跟踪状态,可以直观的看到软件接收机捕获跟踪各通道卫星的状态,包括通道卫星的通道号、卫星号、帧、码频率、载波多普勒值、伪距等.由表1可以看出,有7颗卫星的信号被跟踪上了,从中以通道1的数据来说明情况.
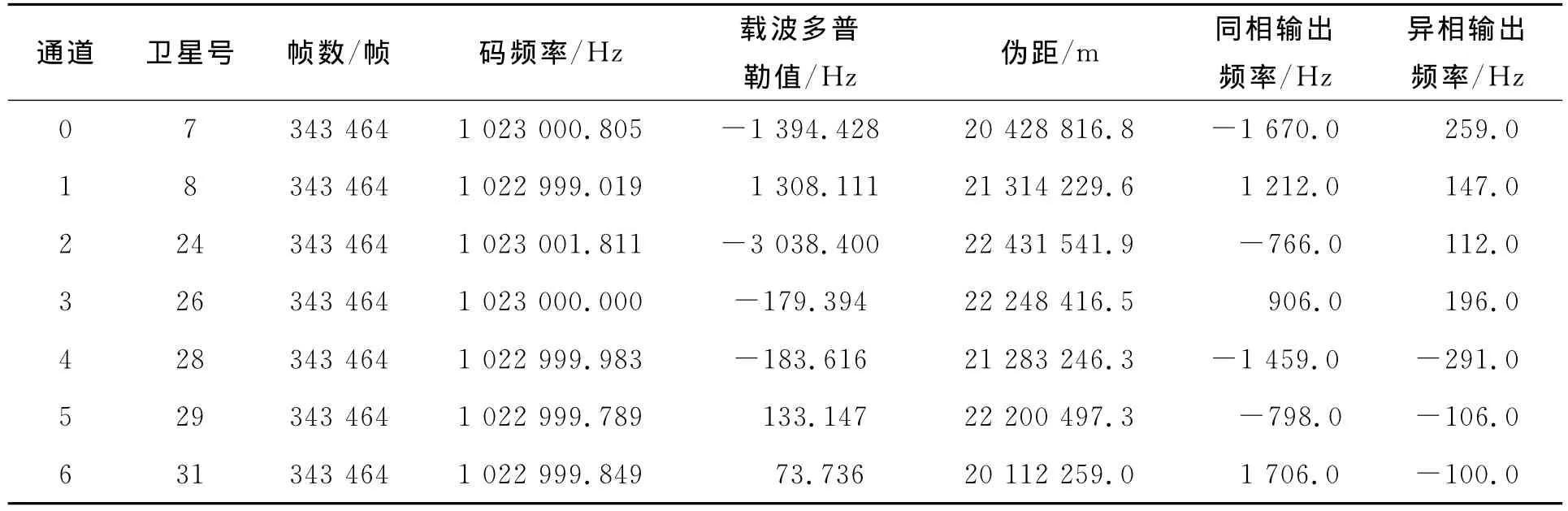
表1 GPS信号搜索结果Table 1 The results of GPS signal acquisition
搜索出卫星PRN值、初始码相位和多普勒频移等参数后,进一步进行跟踪计算,通道1所接收到的卫星(PRN=7)同相与正交相的跟踪结果如图4.导航数据位信息包含在同相数据中,对其跟踪结果处理即可得到导航数据,而正交相中仅包含噪声.
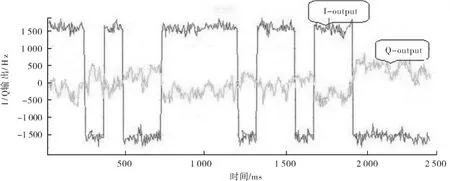
图4 GPS信号跟踪结果Fig.4 The result of GPS signal tracking
5 结 语
本文介绍了GPS软件接收机的基本结构,捕获及跟踪的基本原理及思路,通过实测数据对算法进行了仿真和验证.对于传统的GPS接收机,均是由专用定制的芯片来实现射频前端和信号处理部分的,虽然运算速度快,但是一旦定型,用户很难改变相应的参数或更换新的算法,且重新制版,不但周期长而且成本高.GPS软件接收机对信号处理功能改用软件来实现,拥有了极大的灵活性.
[1]James B Y T.Fundamental of Global Positioning System Receivers:A Software Approach[M].Hoboken,NJ,USA:A Wiley Interscience Publication,2000.
[2]张玮.高动态GPS接收机跟踪技术研究[D].西安:西安理工大学,2008.
[3]Borre K,Akos D M,Jensen N B P R S H.软件定义的GPS和伽利略接收机[M].杨东凯,张飞舟,张波,译.北京:国防工业出版社,2009.
[4]王建平.GNSS接收机跟踪环路的设计与实现[D].北京:北京邮电大学,2010.
[5]唐康华.基于射频前端的GPS软件接收机设计与验证[J].中国惯性技术学报,2007,15(1):51-54.
猜你喜欢
杭州电子科技大学学报(自然科学版)(2023年3期)2023-06-30 06:57:34
烟台大学学报(自然科学与工程版)(2021年1期)2021-03-19 08:38:42
上海公路(2018年4期)2018-03-21 05:57:46
探测与控制学报(2015年4期)2015-12-15 15:00:50
电测与仪表(2015年15期)2015-04-12 00:43:48
河北科技大学学报(2015年5期)2015-03-11 16:16:37
中央民族大学学报(自然科学版)(2014年1期)2014-06-11 01:28:38
电测与仪表(2014年8期)2014-04-04 09:19:36
陕西理工大学学报(自然科学版)(2014年6期)2014-03-25 00:37:44
陕西理工大学学报(自然科学版)(2014年6期)2014-03-25 00:37:44