
广域继电保护中一种故障判定算法
2013-10-19 14:54李运坤江登笠周文越
四川电力技术 2013年3期
李运坤,江登笠,周文越
(1.德阳电业局检修公司,四川 德阳 618000;2.四川大学电气信息学院,四川 成都 610065)
0 引言
传统继电保护都是采用离线整定以获得保护定值,但电力系统运行方式太多且变化频繁,因此无法保证定值的灵敏性和选择性随时都满足要求。近几年的大面积停电表明,当发生大范围潮流转移时,传统保护难以区分线路内部故障和过负荷[1]。为提高继电保护的性能,提出了广域继电保护的概念,即利用电力系统中不同位置的广域测量信息来实现继电保护的功能。在现有的高压系统中,主保护通常是基于纵联差动原理进行动作判定的,能不受电网运行状态的影响而快速确定故障位置。因此广域继电保护一般用于后备保护。
近年来,人们对广域继电保护展开了广泛的研究。在系统结构方面,文献[2-3]根据图论中的相关知识划分保护区域,文献[4]将多Agent 引入广域继电保护的体系结构。在保护算法方面,文献[4-6]根据底层终端的智能电子设备(IED)的方向信息实现故障判定,文献[7]利用电压测量信息组成故障判据。为提高保护的容错性能,文献[8-10]融合电网多点信息实现故障元件识别。
这里对广域继电保护的算法进行了研究。在混合式广域继电保护系统模型的基础上,利用Petri 网得到元件/IED 关联矩阵,矩阵中的每个元素表明相应元件与IED 的关联程度,然后将IED 的方向信息作为主判据,主保护和距离I 段的动作信息作为辅助判据,识别故障元件。需要说明的是,这里所指的元件都为电网的一次设备。
1 广域继电保护系统结构
广域继电保护的系统结构可分为3种:集中式、分布式和混合式[11]。
集中式结构从整个大电网采集数据,控制中心对数据进行整理分析并决策,然后将处理信息发送给各个IED 执行决策。分布式结构将数据的分析和决策放在每个IED 上。
综合集中式结构和分布式结构的优点,提出了混合式系统结构。这种结构对整个电网进行分区处理,每个局域网内有单独的控制决策中心进行数据处理以及决策,并与相邻局域网的控制中心进行信息交换。就目前看来混合式系统结构应该是广域继电保护系统的最佳结构。从整体上看,混合式系统结构与分布式结构相似,每个局域网等同于一个IED,相邻局域网之间进行必要的信息交换,但主要信息在局域网内部传输,因此减少了不必要的信息通信。从局域网层面来看,混合式系统结构又与集中式结构相似,在局域网内部,决策中心负责全部的信息处理,避免了单个IED 获取信息过于单一的缺点。再则,考虑到系统升级后,单个IED 功能更加完善或者决策中心信息处理能力大幅提高,混合式结构很容易过度到其他两种结构。图1 为混合式系统结构示意图。
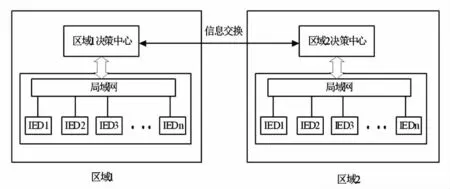
图1 混合式系统结构示意图
这里的故障判定算法是建立在混合式系统结构的基础上。所分析的电网均为单个局域网。对于广域继电保护的保护区域划分方法,可参见相关文献,这里不做详细讨论。
2 元件/IED 关联矩阵
如图2 所示的电网,被保护的元件为母线B1~B5,线路L1~L5,每个保护上都安装一个IED,可测量该位置短路电流方向,读取所安装保护的动作信息。
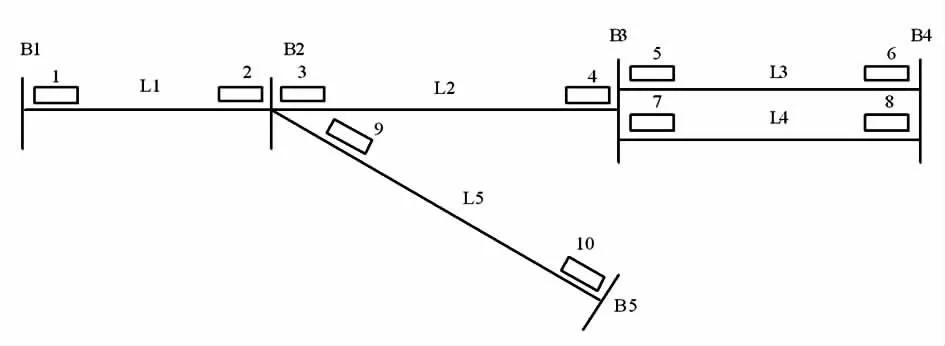
图2 某电网接线图
受与故障元件距离、灵敏度等因素影响,电网内的IED 对于故障的反映程度有所不同。对于某一个电力元件而言,其自身保护装置中IED 的故障信息无疑是最准确的,其次相邻元件中的IED 也能从某种程度上反映故障元件的特征。因此,希望广域继电保护系统的决策中心在进行故障识别时,能够识别IED 与电力元件的这种关系,即对于特定的故障元件,决策中心应当按照IED 故障信息的价值对IED 加以区分。因此,引入了元件/IED 关联矩阵的概念。
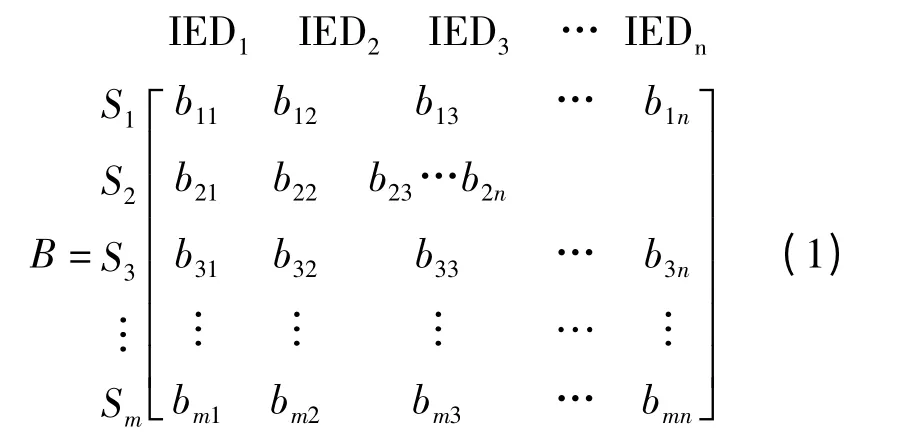
如式(1)所示,m×n 维矩阵B 为一个元件/IED矩阵。矩阵的每一行代表一个被保护元件,每一列代表一个IED,矩阵的元素量化了元件与IED 的关联程度。下面将详细阐述基于Petri 网推导元件/IED 矩阵的方法。
2.1 Petri 网的基本原理
Petri 网是一种可以用图形表示的组合模型,又是严格定义的数学对象,可以很方便地用于静态结构分析和动态的行为分析。图3 为Petri 网的典型结构,圆圈表示库所,方框表示变迁,箭头表示有向弧,黑点表示令牌。Petri 网的基本规则为:有向弧必须是有方向的;两个库所或变迁之间不允许有弧;位置节点可以拥有任意数量的令牌。
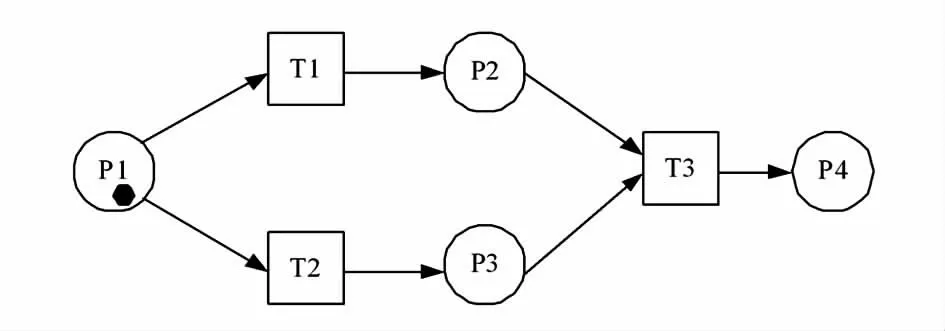
图3 Petri 网典型结构
如果一个变迁的每个输入库所都拥有令牌,该变迁即为被激活。一个变迁被允许时,变迁将发生,输入库所的令牌被消耗,同时为输出库所产生令牌。
2.2 元件/IED 矩阵推导过程
以图2 所示电网为例说明基于Petri 网的元件/IED 矩阵推导方法。电网中的IED 等同于库所,被保护元件等同于变迁,元件与IED 间的功率流动等同于有向弧,方向为由母线到LED,由LED 到线路。于是图2 所示电网可等同于图4 所示Petri 网。以推导元件/IED 矩阵中L2 所在行为例,假设L2 故障,放置一个带令牌的库所指向L2 所在变迁。
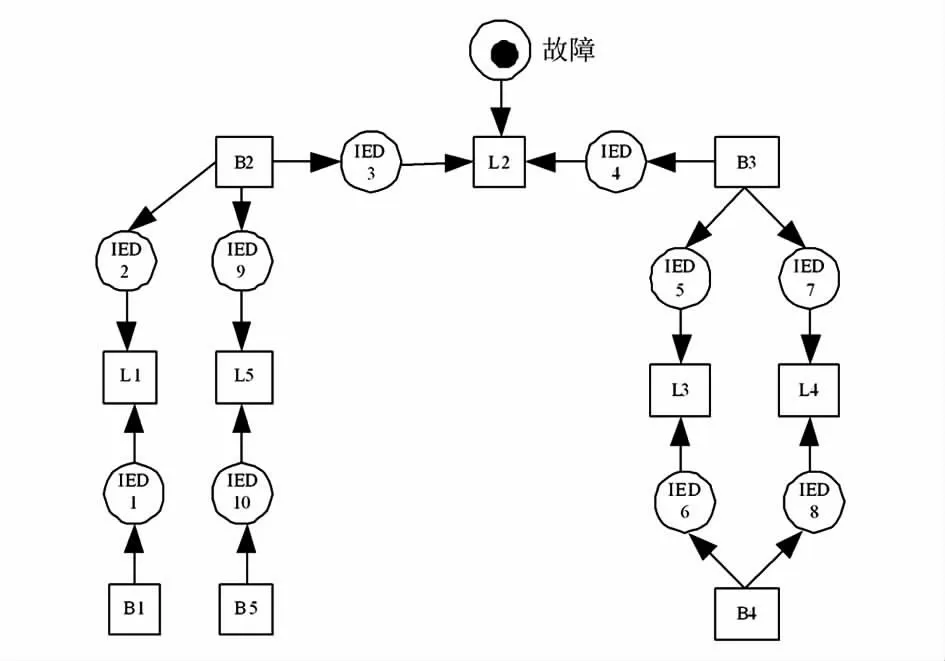
图4 电网的Petri 网模型
元件/IED 矩阵的求解过程就是令牌在各个库所的转移过程,也就是令牌从故障库所一步步向各个IED 库所的转移过程,令牌的每一次转移,都是从一个库所转移到离它最近的库所,得到令牌的库所将令牌保存并沿着有向弧继续向其他库所转移令牌,一直重复此过程,直到Petri 网中所有的库所都接受到令牌。
定义3 个矩阵U、M、C。U 与网络结构相关,保持不变。M、C 都为动态矩阵,随着令牌的转移不停变化。
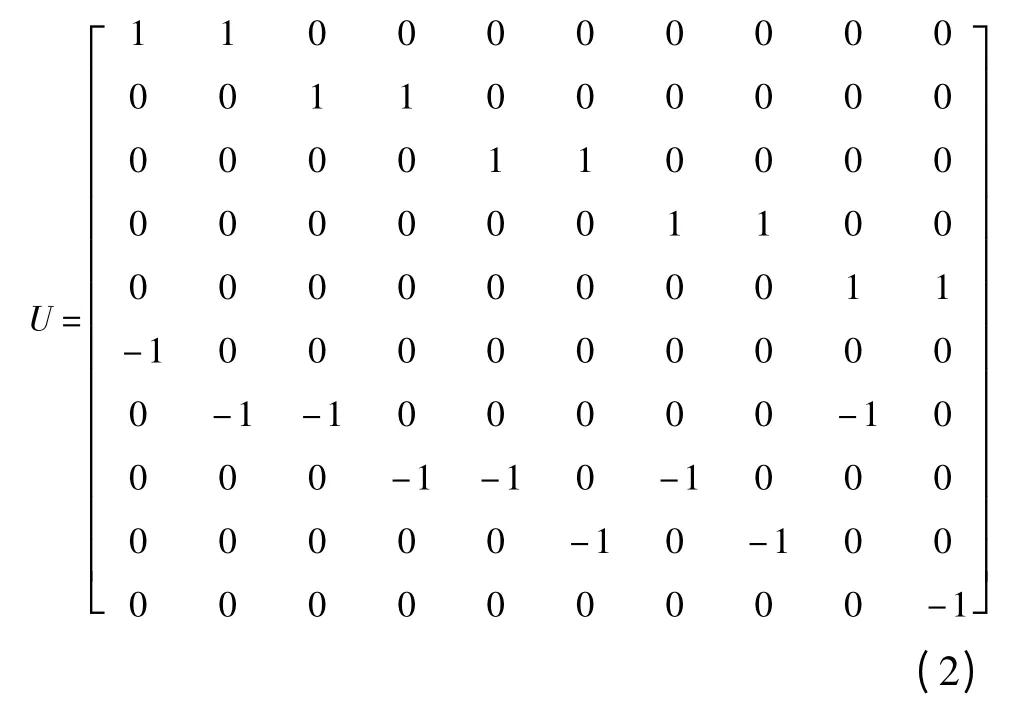
U 为变迁/库所关联矩阵,表明变迁与库所的关系。矩阵的每一列代表一个库所,每一行代表一个变迁。当变迁是库所的输出时uij=1,当变迁是库所的输入时uij=-1。图2 所示电网的U 为式(2)所示矩阵,其中行按IED1~IED10 排列,列按L1~L5、B1~B5 排列。
M 为令牌位置矩阵,Mi表示第i次推导的M 矩阵,表明令牌在Petri 网中的分布。对图2 所示电网,M 的列按IED1~IED10 排列,这里未考虑故障库所。

C 为变迁激活矩阵,Ci表示第i次推导的C 矩阵,表明Petri 网中被激活的变迁。如果令牌的转移是从线路到IED,即与规定的正方向相反,则在C 中的相应位置取-1,反之如果令牌的转移是按规定的正方向转移则在C 中的相应位置取1。C 可由M·UT计算得到。由于未考虑故障库所,M0为全零矩阵,因此不能用M0·UT得到C1。对图2 所示电网,C 的列按L1~L5、B1~B5 排列。从图4 可以看出,变迁L2 被激活。

令牌在Petri 网中的传播过程可用下面两个式子表示。
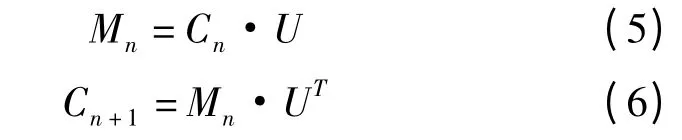
按式(5)、式(6)进行迭代操作,直到网络中每个库所至少有一个令牌,即矩阵M 中无零元素。
对图4 所示Petri 网进行上述操作,经过三次迭代,可得

ML2为最终L2 对应的令牌位置矩阵。从矩阵ML2可以看出,IED3、IED4 所在列数值最大,IED2、IED5、IED7、IED9 其次,IED1、IED6、IED6、IED10 最小。这些值表明了L2 与各IED 的相关程度。
当L2 发生短路故障时,IED1、IED3、IED4、IED6、IED8、IED10 处的方向元件判定为负方向,IED2、IED5、IED7、IED9 处的方向元件判定为正方向。用矩阵I 表示这种关系,I 的列按IED1~IED10排列。

IL2表示L2 与各IED 的方向关系,将IL2与ML2点乘,便可将方向信息加入元件与IED 的相关程度中。修改ML2矩阵为

对电网中的每个元件,按上述方法进行推导时,U 都是一样的,需要改变的是C1和I。需注意的是,为保持每个元件的M 矩阵中元素的符号统一,在推导母线的M 矩阵时,C1中的元素取为负。将所有M矩阵组合成一个矩阵如下。
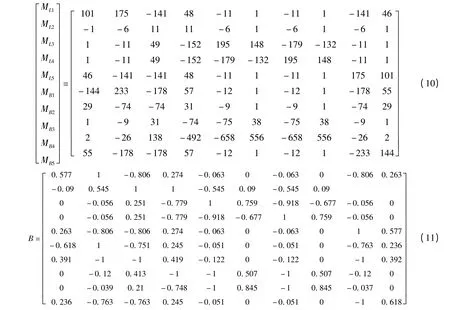
可以看出,不同元件M 矩阵各元素的值相差较大,由于只需要反应元件与IED 之间相对关联程度,因此为方便比较,将矩阵中的各元素除以元素所在行最大的绝对值,最后得到的矩阵便为元件/IED关联矩阵。矩阵中的某些元素可能非常小,这表明对应的元件与IED 关联程度相当低,于是可直接忽略,将该元素置零。最后得到的矩阵即为元件/IED关联矩阵B。
借用Petri 网络的基本概念和原理,对元件/IED矩阵的元素取值进行推导,过程直观简便,只需要简单的矩阵运算,便可从数学的角度量化关联矩阵的元素值,从而达到对元件与IED 之间关联矩阵赋值的目的。相对于其他算法,Petri 网络不需要在庞大的解空间内寻求最优解,从而降低了运算难度。当电网结构发生变化时只需修改矩阵U 中的相关元素即可。可以看出,基于Petri 网推导元件/IED 关联矩阵的过程即是不断对电网中IED 进行赋值,而与元件关联越紧密的IED 被赋值的次数也就越多,因此最后得到的元件/IED 矩阵反映了元件与IED的关联程度。
3 故障判定算法
将方向元件的动作信息作为故障判定的主判据。而主保护和距离Ⅰ段误动率很低,因此为充分利用冗余信息,将主保护和距离Ⅰ段的动作信息作为故障判定的辅助判据。
方向元件可能的动作情况为
当保护动作时,经过一段延时后,局域网的决策中心在一定的时间范围内收集所有IED 方向元件以及主保护和距离I 段的动作信息,并按照式(12)、式(13)、式(14)进行赋值。分别用矩阵F、Z、L 表示电网中方向元件、主保护和距离I 段的动作信息。

n 为电网中IED 的数量。上面3 个矩阵的每1列代表1 个相应位置保护的动作信息,排列顺序与元件/IED 矩阵列的排列顺序一致。
在得到电网的元件/IED 关联矩阵和式(15)、式(16)、式(17)3 个矩阵后,便可用式(18)计算故障判定值。

式中,λ1、λ2、λ3为权重因子,考虑到方向信息为主判据,主保护和距离Ⅰ段的动作信息为辅助判据,λ1应大于λ2、λ3。R 代表系统中保护范围内所有元件的故障判定值ri组成的列相量如下。

式中,m 为电网中元件的数量。式(19)就是将每个IED 动作值、主保护和距离Ⅰ段动作值与对应IED与每个元件的关联度相乘,然后将3 个值相加。由于元件/IED 矩阵已进行过归一化处理,因此式(20)所得向量R 中的元素定量表示了元件故障概率的相对大小。
元件的故障判据为

式中,riset为预先设定的故障阈值。电网中的每个元件都有自己的故障阈值,应该根据电网的拓扑结构选择每个元件合适的故障阈值。这里从两方面考虑元件的故障阈值。首先,考虑到故障定位的准确性与可靠性,阈值应适当取高;其次,当通信故障或IED 灵敏度不够时,可能会造成电网内某些IED 不动作或误动,此时因考虑较低的阈值。因此,在计算元件阈值时,应假设该元件故障,在电网内所有IED都正确动作时确定一个阈值,然后以N-1 切换的方式考虑单个IED 故障时,再考虑一定的裕度便可确定最终的元件故障阈值。
4 算例分析
以图2 所示电网为例说明所提出的广域继电保护故障判定算法。λ1、λ2、λ3分别为1、0.5、0.5。电网的元件/IED 矩阵为式(11)所示矩阵。假设线路2 中点处发生故障,保护动作正确、方向元件2 误动、拒动。按式(16)计算各个元件的故障判定值,最终的判定结果见表1。
从表1 可以看出,故障线路的故障判定值要明显高于其他非故障线路的故障判定值,主要原因在于,在用方向信息进行故障判定时,在非故障线路中负方向元件动作后起到一定的负反馈作用,从而部分抵消了非故障线路的正方向元件动作后的故障计算值,而在故障线路中负方向元件则起到了正反馈作用,使判定值增大。根据这种特征,再加以主保护和距离I 段动作信息的辅助判据,决策中心就能区分故障元件与非故障元件,且具有较强的容错性。因此,只要阈值设定合理,即使某个保护误动或拒动,决策中心仍能正确判定故障。
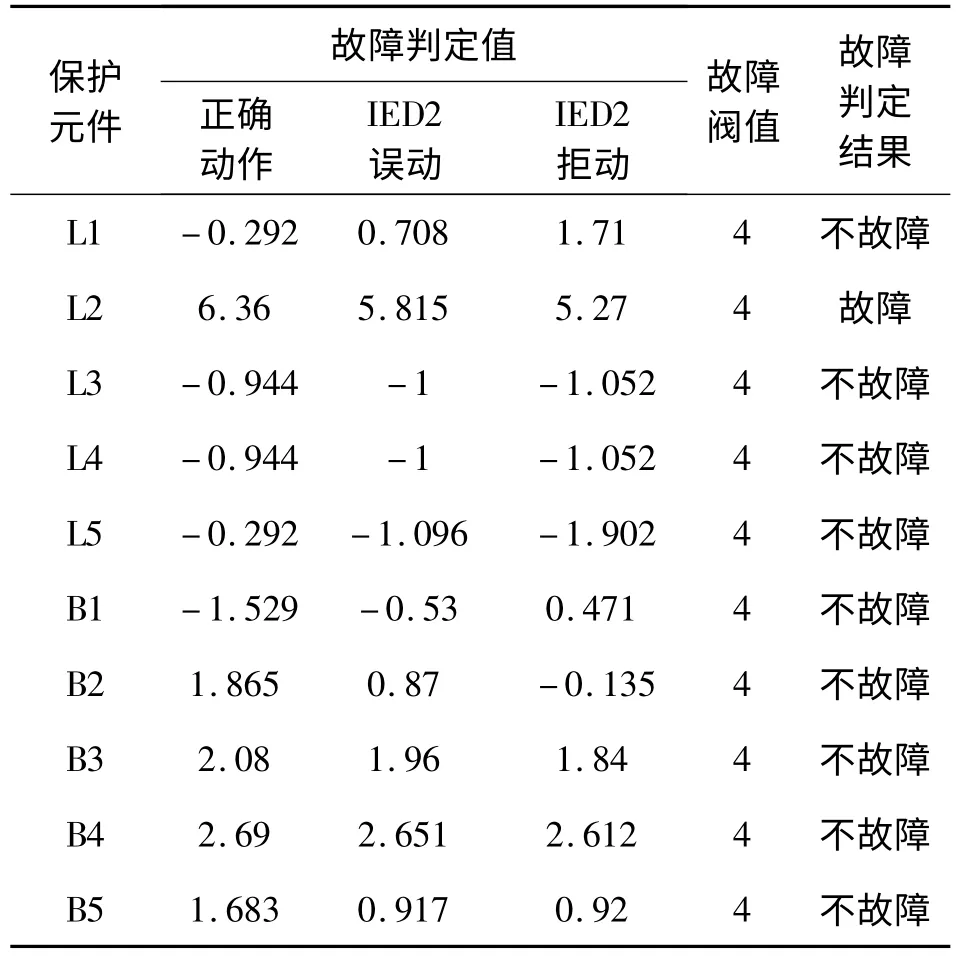
表1 故障判定结果
5 结语
在混合式广域继电保护系统结构的基础上,基于Petri 网推导出表示电网一次设备与IED 关系的元件/IED 关联矩阵。推导过程简单,当网络结构发生改变时,易于更新。故障发生后,将IED 的方向信息作为主判据,主保护和距离Ⅰ段的动作信息作为辅助判据,并借助元件/IED 关联矩阵进行故障判定。通过算例分析表明,该算法能很好的分辨出故障元件与非故障元件,并具有较强的容错性。
[1]杨春生,周步祥,林楠,等.广域保护研究现状及展望[J].电力系统保护与控制,2010,38(9):147-150.
[2]苏盛,K.K.Li,W.L.Chan,等.广域电流差动保护区划分专家系统[J].电网技术,2005,29(3):55-63.
[3]李振兴,尹项根,张哲,等.有限广域继电保护系统的分区原则与实现方法[J].电力系统自动化,2005,29(3):55-63.
[4]李振兴,尹项根,张哲,等.基于多Agent 的广域保护系统体系研究[J].电力系统保护与控制,2012,40(4):71-75
[5]丛伟,潘贞存,赵建国.基于纵联比较原理的广域继电保护算法研究[J].中国电机工程学报,2006,26(21):8-14
[6]田聪聪,文明浩.具有高信息冗余的广域后备保护系统[J].电网技术,2011,35(10):214-219
[7]杨增力,石东源,段献忠.基于方向比较原理的广域继电保护系统[J].中国电机工程学报,2008,28(22):97-93
[8]汪华,张哲,尹项根,等.基于故障电压分布的广域后备保护算法[J].电力系统自动化,2011,35(7):48-52
[9]汪旸,尹项根,赵逸君.基于遗传算法的区域电网智能保护[J].电力系统自动化,2008,32(17):40-44
[10]汪旸,尹项根,张哲,等.基于遗传信息融合技术的广域继电保护[J].电工技术学报,2010,25(8):174-179
[11]尹项根,李振兴,刘颖彤,等.广域继电保护及其故障元件判别问题的探讨[J].电力系统保护与控制,2012,40(5):1-9
猜你喜欢
贵州师范学院学报(2022年12期)2023-01-16
小猕猴学习画刊·下半月(2022年2期)2022-04-16
烟台大学学报(自然科学与工程版)(2021年1期)2021-03-19
网络安全技术与应用(2019年7期)2019-12-24
计算机工程(2018年8期)2018-08-17
长春师范大学学报(2017年8期)2017-09-03
湖北民族大学学报(自然科学版)(2016年3期)2016-11-29
华侨大学学报(自然科学版)(2014年4期)2014-10-11
天津科技大学学报(2014年4期)2014-02-27
制造技术与机床(2012年3期)2012-09-26
