手扶式平贝母挖掘机设计及试验
2013-10-16 03:44宋江徐龙
黑龙江八一农垦大学学报 2013年4期
宋江,徐龙
(1.黑龙江八一农垦大学工程学院,大庆 163319;2.黑龙江省红星农场)
平贝母(Fritillaria ussuriensis Maxim)为百合科(Liliaceae)贝母属FririllariaL.植物的鳞茎,味苦、甘,性微寒,具有清热润肺,化痰止咳功能[1]。平贝母是我国较为名贵的传统大宗药材,更是我国出口创汇的重要商品,在国内外中药材市场上颇受青睐。传统平贝母药材以野生为主,近几十年来国内出现人工栽培方式[2-3]。主产于黑龙江、吉林及辽宁等省的东部山区,与我国川贝母、浙贝母“三分天下”。统计资料表明[4-5],2006年,全国平贝母种植面积为1.6 万hm2,产量为2 万t,2010年达到1.8 万hm2,产量为2.4 万t,分别比2006年增长12.5%和20%。然而,平贝母生产机械装备,尤其是收获机械,却极为匮乏,根本无法满足其规模化生产之需求。
平贝母挖掘是平贝母收获的重要环节,目前其机械化收获水平非常低,大部分地区还主要依靠人工收获,少数地区所使用的平贝母挖掘机仅仅实现了挖掘功能的半机械化作业,不能进行有效的推广[6],平贝母专用挖掘机在国内还处于空白。国外发达国家由于没有或种植面积小,尚无平贝母收获机械方面的报道。
结合东北丘陵地带的地形地貌和平贝母的种植模式,在考虑破损率和收净率等因素的前提下,研制了手扶拖拉机悬挂的平贝母挖掘机,并在田间进行了样机收获性能试验,确定样机性能参数。
1 种植模式和结构方案
1.1 种植模式
平贝母种植选用针阔混交林下发育的地带性森林土壤,属暗棕壤或砂壤,土壤有机质含量高,质地疏松,透气性、透水性好,pH 值为6.4~6.8[7]。平贝母采用种子繁殖的种栽,秋季翻耕深度在25~30 cm;春季进行旋耕,旋耕深度在25~30 cm。平贝母作畦的规格为畦面宽约1.2 m,作业道宽度约40 cm,畦长因地块而定,一般以15 m 左右为准,畦高约20 cm。先丈量出畦床的位置,用米尺量好畦宽、作业道宽和畦长,在畦面的四角处钉上木桩,然后用尼龙绳按四角木桩系好。在作畦床时,当畦床做好后,整平畦面,均匀施上一层3~4 cm 厚的已腐熟好的农家肥料,然后撒上一层约3 cm 的细土,整平后轻压,然后直播种子从邻近畦床取用复土,覆盖厚度4~6 cm 左右,最后在上面盖上一层盖头粪2~3 cm,如图1 所示。
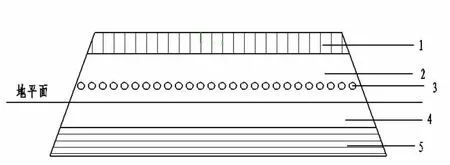
图1 平贝母种植模式Fig.1 Fritillaria Ussuriensis planting pattern
1.2 整机结构及工作过程
针对平贝母种植模式,考虑到东北山区地形地貌及工作效率等因素,设计成手扶式平贝母挖掘机,平贝母挖掘机的链接框和手扶拖拉机尾端相连,动力由手扶拖拉机离合器皮带轮传递到挖掘机主动皮带轮,总体设计结构如图2 所示。

图2 平贝母挖掘机结构简图Fig.2 Structural drawings of Fritillaria Ussuriensis digger
整机主要由手扶拖拉机、传动系统、分土机构、起贝土机构、贝土输送机构、贝土集收装置和机体等部分组成[8]。该设备一次完成1 行平贝母的起收工作,具体功能及工作过程为:机具行进过程中,由分土机构刮去表层土壤,并将表层土分到两边的垄沟,起贝土机构松土并起收贝土,贝土输送机构将贝土输送到集收装置,并将收起的贝土成堆置于畦上,完成起收过程。

表1 技术参数Table 1 Technical parameters of Fritillaria Ussuriensis digger
2 关键工作部件结构及工作原理
2.1 分土机构
分土机构的主要作用是将平贝母上层的盖头粪和覆土层分到作业道上。根据上述平贝母种植模式和生产实际,该层厚度在5~8 cm,对于一般15 m 畦长,起土量在1 m3左右,可见起土量较大,这些土不将其分出来势必增大机械化收获等级筛分环节的压力,影响筛分效率,因此有必要设计分土机构。
该机构主要由螺旋轴、反向螺旋叶片和螺旋壳体组成。

图3 分土机构Fig.3 Riffle splitter
2.1.1 挖掘铲参数的确定
根据图1,平贝母形状尺寸和平贝母挖掘机结构特点,分土机构挖掘铲设计为条形平面单铲,铲面呈条状,可有效降低刮掉多余的贝土,影响收净率。由于平贝母畦宽为1.2 m 和盖头粪、覆土层向两侧作业道分的特点,因此挖掘铲的宽度为1.2 m。
挖掘铲的工作参数主要包括挖掘深度和入土角α。挖掘深度取决于盖头粪和覆土层厚度,为避免铲到和铲伤平贝母鳞茎,挖掘深度需要小于盖头粪和覆土层厚度。分土深度在5~8 cm 范围内,挖掘铲深度由尾轮高度来调整,分土调节深度可实现挖掘深度在0~8 cm 范围内调节。由于分土深度较浅,只要保证分出的土连续向两侧运动即可,根据平贝母贝土物理力学特性,入土角小于贝土休止角,理论分析及实践表明[9-10],入土角通常设置为 20 °~25 °。
2.1.2 螺旋机构参数的确定
螺旋是平贝母分贝土部分的基本构件,它是由轴和螺旋叶片组成的,螺旋叶片多由钢板冲压而成,然后将它们相互焊接起来,其厚度为4 mm。
按照贝母收获机的行走速度为0~2 m ·s-1,按每天8 h 工作,每天工作量约为1 334 m2,则螺旋最大输送量Q=13.44 m3。
由螺旋直径计算公式[13]

式中:AZ——物料综合特性系数;
Ψ——充填系数;
C——倾斜工作时输送量校正系数;
ρ0——物料堆密度,t ·m-3;
Q——输送能力,t ·h-1。
经查表,式中 AZ=0.2,Ψ=0.2,物料堆密 ρ0=1.34,C=1。
取整得到:D=150mm
由螺旋输量计算送公式[13]

式中:A——物料特性系数;
D——螺旋直径。
得到螺旋的极限速度n≤101 转·min-1,取整得,n=100 转·min-1。
2.2 起贝土挖掘铲
起贝土挖掘铲和分土机构均采用条形挖掘铲,挖掘铲的工作参数主要包括挖掘深度h 和入土角α。挖掘深度取决于畦床农家肥料厚度和肥上细土厚度,为避免铲到和铲伤平贝母鳞茎,挖掘深度需要大于肥料厚度和肥上细土厚度。起贝土深度在4~6 cm范围内,挖掘铲深度由尾轮高度来调整,分土调节深度可实现挖掘深度在0~6 cm 范围内调节。由于起贝土深度较浅,只要保证分出的土连续向输送装置上运动即可,根据平贝母贝土物理力学特性,入土角小于贝土休止角,理论分析及实践表明[14-15],入土角通常设置为 20 °~25 °。

图4 挖掘铲的结构参数Fig.4 Structural parameters of digger spade
2.3 贝土输送机构
贝土输送机构主要由传动滚筒和传送带组成。其工作参数主要包括传送带倾角、带宽和传送速度[16]。
试验表明:贝土输送机构带宽为1.2 m,输送带倾角为15°,输送速度略大于行走速度。
2.4 限深机构
该机械限深主要采用限深轮来实现,并采用陇上限深的方式[17]进行,限深轮直径为100 mm,与机械的链接框连接。
3 挖掘机性能试验及分析
3.1 试验条件及方法
试验地点:伊春市红星区平贝母生产基地。
试验基地环境条件:基地海拔279 m,地形为平地,灌排水条件良好。收获期气温25 °C,土壤平均含水量39%,土壤类型为属暗棕壤或砂壤。
试验方法:每次试验收获距离为15 m,重复3次。分别记录试验所用时间,测出平贝母收获重量、损伤重量和漏收重量等数据。
3.2 试验结果及分析
根据试验数据经计算获得挖掘机的性能参数如表2 所示。

表2 平贝母挖掘机的性能参数Table 2 Performance parameters of Fritillaria Ussuriensis harvester
田间试验表明,平贝母挖掘样机收获流畅,能够满足平贝母收获的各项作业功能。经观察分析,损伤率主要来自于挖掘铲对平贝母的铲断。同时该样机在试验过程中还发现存在以下问题:
(1)由于平贝母畦床在种植时盖头粪、覆土层、垫土层和底肥层厚度不均,致使分土铲和起贝土铲不能在分土和起贝土时存在分土厚度不均和漏起平贝母的问题,这也是造成平贝母损伤的重要原因之一。在后续的研究中,需要设计分土铲和挖掘铲自动调节装置,保证挖掘质量,进一步降低平贝母破损。
(2)由于土壤水分较大,分土机构中的螺旋叶片出现黏土现象,严重影响该机器的分土能力。解决的措施是在分土机构中增加刮土机构,降低黏土量。
4 结论
(1)结合平贝母种植模式,设计手扶式平贝母挖掘机,通过样机试验,该机械能够完成平贝母的分土、起收、输送等环节,收净率为98%,损伤率为2%,总损失率为6%(损伤率和漏收率),生产率为0.14 hm2·h-1。
(2)分土机构采用螺旋分土方式,可有效降低分土机构占用整台设备的空间;同时设置了分土机构和起贝土机构的挖掘铲入土角和分土机构螺旋旋转速度、螺距等工作参数。
[1] 常维春.平贝母栽培[M].北京:科学普及出版社,1984.
[2] 刘兴权.平贝母细辛无公害高效栽培与加工[M].北京:金盾出版社,2003.
[3] 潘宣.百合川贝母平贝母伊贝母[M].北京:科学技术文献出版社,2004.
[4] 丁乡.东北三省平贝母产销调查[J].中药研究与信息,2004,6(12):34-35.
[5] 丁乡.平贝母走出低谷[J].特种经济动植物,2011(1):20-21.
[6] 程立杰,宋宝昌,蔡秀华,等.SBC-1 型平贝收获机的研制[J].林业机械与木工设备,2005,33(1):24-25.
[7] 胡兆平.平贝规范化生产技术规程[M].北京:中国标准出版社,2009.
[8] 宋江,卢松卓,卢围红.小型平贝母收获机械起贝土机构设计[J].机电工程技术,2009,38(4):101-102.
[9] 王家胜,尚书旗.自走式双行胡萝卜联合收获机的研制及试验[J].农业工程学报,2012,28(12):38-39.
[10] 牛海华.强适应性小型振动式马铃薯挖掘机的设计[D].兰州:甘肃农业大学,2011.
[11] 赵学笃,陈元生,张守勤.农业物料学[M].北京:机械工业出版社,1987.
[12] 周祖锷.农业物料学[M].北京:农业出版社,1994.
[13] 刘家仁,陶性华,徐国昌,等.机械设计师手册[M].北京:机械工业出版社,1989.
[14] 杨然兵,李国莹,尚书旗,等.机械化挖掘收获部件发展现状与展望[J].农机化研究,2008,9(9):5-8.
[15] 贾晶霞,张东兴,桑永英.马铃薯挖掘铲计算机辅助分析与模拟试验研究[J].农业工程学报,2006,22(8):106-110.
[16] 王耀斌.物流装卸机械[M].北京:人民交通出版社,2003.
[17] 万霖,汪春,车刚,等.蔬菜移栽机的覆土镇压器设计[J].2013,24(3):16-18.
猜你喜欢
建材发展导向(2022年6期)2022-04-18
装备制造技术(2020年4期)2020-12-25
中华养生保健(2020年5期)2020-11-16
中华诗词(2019年8期)2020-01-06
传媒评论(2019年7期)2019-10-10
红领巾·探索(2018年10期)2018-11-14
西安建筑科技大学学报(自然科学版)(2016年1期)2016-11-08
数学大王·低年级(2015年6期)2015-07-09
医学研究杂志(2015年5期)2015-06-10
有色金属设计(2015年2期)2015-02-28