基于Virtual Box非均匀点状冰路面的安全性分析
2013-10-15 05:08:04杨玉芬李明明高晓旸
吉林大学学报(信息科学版) 2013年2期
杨玉芬, 李明明, 高晓旸
(吉林大学 a. 网络中心; b. 计算机科学与技术学院, 长春 130012)
0 引 言
现在, 乙醇汽油的使用已得到大范围推广。机动车在十字路口怠速等待通行的短暂停车时, 由于在寒冷地带的机动车排气管滴水导致路面结冰, 形成非均匀点状冰路面, 使路面附着系数发生变化, 从而影响车辆的行驶安全性[1]。笔者研究滴水量、 路面环境对车辆行驶安全的影响程度及关系具有现实和理论意义。目前我国科研工作者已对寒冷季节时路面大范围均匀结冰导致的路面附着系数变化进行了具体分析[2], 但对非均匀点状结冰路面的研究仍是空白。因而, 笔者针对这种状况展开了一系列的研究, 希望最终研究成果可为在非均匀点状结冰路面上车辆行驶安全性做准确分析与评估, 并且为后续的研究提供理论依据, 从而可让机动车更安全地行驶在公路上。
1 研究对象
由于我国北方不同地区冬季降雪及气温状况有很大差别, 大范围研究各地区的气象状况将给项目的进行以及分析带来极大不便, 综合考虑多种因素后, 笔者拟在长春市进行实验和数据的采集。考虑到水只有在0 ℃以下时才会出现结冰的状态, 并且城市通常在早晚上下班高峰时期才会出现交通拥堵的状况[3]。在考虑气温的前提下, 由于汽车经过路面时会带走一部分积雪, 并且汽车从积雪路面行驶过后会产生一部分热量, 造成少量的积雪融化形成冰, 所以实验研究必须将路面积雪深度大于5 mm以及日降水量特别大的天气排除在外(这里暂不考虑特殊的干扰因素, 比如人为洒融雪剂以及工人大范围铲雪对路面状况的影响)。

表1 项目研究范围内的日期
注:由于2010年出现了较大范围的持续降雪, 导致对项目研究范围有一定的影响, 但特殊的天气不能代表长春的天气状况, 所以该项目的研究仍具有其价值所在。
经过对2008年~2011年长春地区日平均气温、 日最高气温、 日最低气温、 日降水量及日积雪深度等数据的采集与分析, 确定了在研究范围内的天数如表1所示。
由表1可看出, 每年的11月中旬到次年的3月中旬时间段在研究范围内, 即路面极易形成非均匀冰面的天气。
2 非均匀冰面的模拟实验
经过对1 000辆车的排量统计与加权计算, 得到平均车排量为1.88 L。乙醇汽油燃烧产生水量的理论计算根据乙醇汽车中各组分的百分比及化学成分的各自燃烧方程式, 可得到完全燃烧状态下乙醇汽油燃烧物中的水含量为16.666 7 g/min, 即0.277 8 g/s。汽车尾气中水致路面结冰量的测量通过对实验车辆怠速时尾气中排放出的水致路面结冰量的测量, 可为非均匀冰面的模拟提供数据与理论支撑。经试验测量, 最终得到汽车怠速时, 尾气中水致路面结冰量为0.104 1 g/s。
通过项目前的准备, 笔者计算乙醇汽油完全燃烧时产生水的量, 并且有怠速时尾气中水导致路面结冰量的数据作数据比对。实验中, 考虑到水喷洒到路面上有一部分的损失及蒸发损耗, 所以实验拟采取0.250 0 g/s的水进行实验非均匀冰面模拟时水的喷洒量, 并且通过观察生活中路面上非均匀冰面的形状, 最终确定了实验中非均匀冰面的形状与大小[4-6]。在干燥路面上, 车速增加, 附着系数几乎没有变化, 而在非均匀点状冰路面上, 附着系数则随速度的增加而急剧变小。制动加速度即刹车时的加速度, 制动加速度增大速度减小, 速度减小的过程中附着系数也随之发生变化, 所以笔者对汽车的制动加速度进行数据采集、 分析。最后应用V-box(Virtual Box)设备对车辆在非均匀冰面上制动时数据进行采集、 处理和分析。
利用V-box对非均匀点状结冰路面第1次制动时制动加速度进行数据采集, 其结果如图1所示。

图1 非均匀点状结冰路面第1次制动加速曲线图
计算制动过程中制动力稳定时制动加速度的平均值, 得a=-0.388 06g(g=9.8 m/s2)。利用V-box对非均匀点状结冰路面第2次制动时制动加速度进行数据采集[7-9], 其结果如图2所示。

图2 非均匀点状结冰路面第2次制动加速曲线图
计算制动过程中制动力稳定时制动加速度的平均值, 得a=-0.370 81g。
综上, 制动稳定时制动加速度a=-0.379 44g, 即非均匀点状结冰路面附着系数为ψ=-0.379 44。
利用V-box对普通路面第1次制动时制动加速度进行数据采集[10,11], 其结果如图3所示。
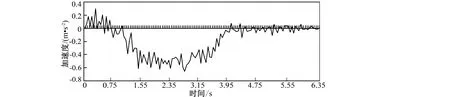
图3 普通路面第1次制动时制动加速度曲线图
计算制动过程中制动力稳定时制动加速度的平均值, 得a=-0.479 38g。
利用V-box对普通路面第2次制动时制动加速度进行数据采集, 其结果如图4所示。

图4 普通路面第2次制动时制动加速度曲线图
计算制动过程中制动力稳定时制动加速度的平均值, 得a=-0.479 38g。
综上, 普通路面附着系数为ψ=-0.479 38。通过对实验数据的观察与分析并经过相关资料的查阅, 可得理论情况下各种路况的附着系数(见表2)。

表2 各种路面上的附着系数
制动距离是指驾驶员踩下制动踏板产生作用至汽车完全停止时, 轮胎在路面上出现明显的拖印的距离。制动距离的长短与行驶的速度、 制动力、 附着系数有关。行驶速度越高, 制动距离越长, 行驶速度与制动距离的平方成正比。制动力是指驾驶员踩下制动踏板后, 阻碍并促使车轮停止转动的力。制动力的大小, 除与踩下制动踏板的行程有关外, 还取决于车轮与地面的附着系数, 道路越光滑(如结冰路面), 附着系数越小, 制动距离越长。制动距离越小, 汽车的制动性能就越好, 安全性越高。由于实验结果与理论数据偏差较小, 所以, 实验测得的普通路面的附着系数及非均匀路面的附着系数均较为合理, 可用于下面的结论分析。

综上, 可得到以下结论。
经过对上述两者情形的比较可以看出, 在非均匀点状结冰路面上制动距离明显比普通路面上的制动距离长, 当起始制动车速为40 km/h时, 二者的制动距离相差S1-S2=3.46 m。
实验中, 采用的实验车辆的额定排量是1.6 L, 此时获得的非均匀冰面的附着系数ψ=0.379 44, 但在项目初期, 经过对长春车排量的统计后得到平均车排量是1.88 L, 如果采用1.88 L排量作为实验依据, 则得到的非均匀冰面的附着系数更小, 此时, 相对应的制动距离更大, 即对驾驶的安全性影响更大。
3 结 语
在车辆较为拥堵的大城市, 车辆总是在合理的行车速度范围内以可达到的最大速度行驶, 因此, 当交通指示灯由绿灯突然变成红灯的一瞬间, 车辆要由其原来的行驶状态变成静止状态。此时制动距离的长短就可对整个行车速度及驾驶安全性造成很大的影响。经过对气象资料的调研与分析可知, 在不同年份中, 在一年内, 虽然在研究范围内的天数不是很多, 但这对城市交通安全状况的影响确实不容忽视, 在车辆众多的城市里, 每个细微的安全隐患都应该极力发掘并排除。在长春这个交通相对不是很发达的城市里, 非均匀冰面对汽车驾驶安全的影响尚如此之大, 那么在天气较冷、交通较为发达的城市里, 汽车尾气排水致路面所结的非均匀冰面会对驾驶安全带来更大的负面影响。
参考文献:
[1]朱毅, 陈南庆. 浅谈严寒与行车安全[J]. 商用汽车, 1995(6): 22-23.
ZHU Yi, CHEN Nan-qing. Talking about Cold and Driving Safety [J]. Commercial Vehicles, 1995(6): 22-23.
[2]董斌, 唐伯明, 刘唐志. 冰雪路面事故成因分析及对策探讨 [J]. 交通标准化, 2010(13): 137-140.
DONG Bin, TANG Bo-ming, LIU Tang-zhi. Ice and Snow Cause of the Incident and Countermeasures to Explore [J]. Communications Standardization, 2010(13): 137-140.
[3]付强, 李塑臣. 如何保证冰雪路面行车安全 [J]. 汽车运用, 2009(11): 42.
FU Qiang, LI Su-chen. How to Ensure that Snow and Ice Road Traffic Safety [J]. Automobile Application, 2009(11): 42.
[4]吴迪, 何坚, 潘嵘, 等. 基于VMware虚拟网络的IPSec实验教学 [J]. 实验技术与管理, 2010, 27(9): 157-167.
WU Di, HE Jian, PAN Rong, et al. VMware Virtual Network-Based IPSec Experimental Teaching [J]. Experimental Technology and Management, 2010, 27(9): 157-167.
[5]周翔鹰. 基于VMware构建虚拟计算机网络实验 [J]. 实验室研究与探索, 2006, 25(7): 809-812.
ZHOU Xiang-ying. Based on VMware to Build a Virtual Computer Network Experiment [J]. Laboratory Research and Exploration, 2006, 25(7): 809-812.
[6]李昕, 吴剑平. 虚拟化技术及其应用 [J]. 凿岩机械气动工具, 2011(3): 32-35.
LI Xin, WU Jian-ping. The Virtualization Technology and Its Application [J]. Drilling Mechahical Pneumatic, 2011(3): 32-35.
[7]邱广文. 虚拟机技术在计算机课程实践教学中的应用 [J]. 电脑知识与技术, 2011(23): 5681-5682.
QIU Guang-wen. Virtual Machine Technology in the Practical Teaching of Computer Courses [J]. Computer Knowledge and Technology, 2011(23): 5681-5682.
[8]沐士光, 师秀凤. 虚拟化技术探讨 [J]. 中小企业管理与科技, 2009(7): 275-276.
MU Shi-guang, SHI Xiu-feng. Virtualization Technology to Explore [J]. Management & Technology, 2009(7): 275-276.
[9]孙建东, 张乐年, 姜延军. 基于FPGA的数字图像信号源中DMA控制器设计 [J]. 机械制造与自动化, 2009(5): 88-91.
SUN Jian-dong, ZHANG Yue-nian, JIANG Yan-jun. The Design of DMA Controllers Based on the FPGA Digital Image Signal Source [J]. Machinery Manufacturing and Automation, 2009(5): 88-91.
[10]HALLAND J, ROBINSON P T. Virtualizing the VAX Architecture [C]∥Proceeding of the 18th Inter-National Symposium on Computer Architecture. Toronto, Canada: [s.n.], 1991: 380-389.
[11]ALTMAN E R, KAELI D, SHEFFER Y. Welcome to the Opportunities of Binary Translation [J]. IEEE Computer, 2000, 3(3): 40-45.
猜你喜欢
幼儿100(2023年45期)2023-12-18 06:49:04
幼儿100(2023年41期)2023-11-21 09:33:50
中华实用诊断与治疗杂志(2022年1期)2022-08-31 09:57:56
建材发展导向(2022年14期)2022-08-19 02:08:40
作文周刊·小学一年级版(2022年24期)2022-06-18 13:11:03
疯狂英语·新读写(2021年8期)2021-11-05 08:44:28
女报(2019年12期)2019-09-10 07:26:53
小天使·一年级语数英综合(2019年2期)2019-01-10 11:57:30
小学生导刊(低年级)(2017年1期)2017-06-12 22:14:50
四川冶金(2017年2期)2017-04-11 12:55:36