
一种新的兴趣区域车辆定位方法
2013-10-15 01:20:38肖宏涛
制造业自动化 2013年15期
肖宏涛
(廊坊广播电视大学,廊坊 065000)
0 引言
近年来,我国机动车数量快速增长。据交管局的数据显示,截至去年年底,全国范围的机动车保有量超过2.4亿,驾驶人接近3亿,其中汽车的保有量接近1.2亿,汽车驾驶人数首次突破2亿[1]。尽管涉及人员伤亡的交通事故较2011年略有下降,但是交通形势仍然严峻,将面临着众多挑战。为了应对这一严峻形势,车辆驾驶员一方面需要进行自我约束,严禁酒后驾车和违规操作等;另一方面,需要从技术的层面,车辆智能化等方面进行完善。
基于视觉的车辆检测技术相对于雷达、激光等,更符合人眼捕捉信息的习惯,获取的信息量将更丰富,且成本低,已经成为当前研究的热点之一[2]。该技术主要分为以下三类,1)基于模型的方法;2)基于特征的方法;3)基于光流场的方法。
上述方法中,基于模型[3]的方法是指将待测车辆的图像与事先建立好的车辆的二维或者三维模型进行匹配操作。该方法需要各种车辆模型信息,因而存储的信息量巨大,在执行匹配算法时,耗费大量时间,难以进行快速实时匹配。基于特征的方法是指针对车辆具有的特征进行检测的方法。车辆所表现的特征包括车辆形状、位置(车道线内)、对称性、灰度值等等[4,5]。该方法具有处理简单和快速等优点,但容易受到周围环境变化的影响,一旦周围环境变化,车辆特征将变得模糊,甚至不能进行检测,因此在处理过程中需要考虑周围环境的变化因素,该方法在车辆实时检测中应用广泛。另一种基于光流场的方法是指目标和摄像机运动或者都运动所产生的瞬时速度场。该方法在不需要先验知识的条件下能够对背景运动情况进行很好的处理。该方法的计算量大,对于光线等环境变化比较敏感,并且实时检测效果不好[6]。
综上所述,本文提出基于兴趣区域(region of interest ,ROI)的车辆检测方法,首先根据车辆位置具有的特征信息,去除干扰信息来确定兴趣区域,然后对兴趣区域使用最大类间方差法将检测车辆从背景信息中分离出来,最后对提取的图像信息进行灰度值计算来确定车辆位置。由于确定的兴趣区域背景简单,通常包含道路信息,因而不会受到光线等环境因素的影响,能准确检测出车辆。通过实验表明该方法是可行的,计算便捷,检出率高,具有较好的鲁棒性[7]。
1 确定兴趣区域
车辆位置的检测过程中,检测准确率会受到周围环境的影响,通常车辆位置都处在一定的环境下,例如道路旁边的建筑群、树木、行人、天空及云朵等,都会对车辆位置的检测产生一定的影响。为了减少车辆环境因素对检出率的影响,需要对车辆所处位置的兴趣区域进行确定后在进行检测。本文通过哈夫变换来检测车辆道路边缘线,该算法鲁棒性和容错性非常好。
1.1 哈夫变换原理
哈夫变换[8]是一种检测直线的算法,在数字图像处理中应用较多,是一种参数估计技术。主要思想是利用坐标系中的点-线对偶性,将图像检测转换成参数空间,进而进行累加统计操作,最后直线的检测是利用寻找累加器峰值进行的。其实质是先将图像空间进行聚类,在寻找空间参数累加对应点,亦即进行峰值检测。由于在车辆检测中,车辆所处的位置部分为车道线,大多情况下位直线,少许曲线,本文的检测视频中为了减少曲线带来的复杂度,故只对直线进行检测。直线表达式见公式(1)。

直角坐标系中点(X,Y)映射到极坐标系(λθ)上,如图1所示。
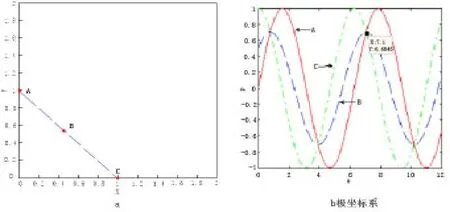
图1 XY坐标系、极坐标系对应图
图1中原空间点A,B,C对应于参数空间的正弦曲线A,B,C。图1左图中A,B,C共线,对应于极坐标系中三曲线的交点。
1.2 使用哈夫变换法检测直线
检测的图像进行哈夫变换后,将会出现包括车道线和干扰线在内的多条直线。需要对道路车道线进行判断,判断的条件主要有以下四点:
1)线段累计长度超过一阈值A;
2)所以线段中,最小线段的长度要超过阈值B;
3)直线斜率要在一定的范围内,具体如下:车道线(位于左侧)需要满足,车道线(位于右侧)需要满足;
4)对于一条直线而言,其上的碎线段最大间隔应小于阈值C。
通过哈夫变换的图像区域多条直线经过上述条件判断后,将一些干扰线去除,车道线一般都在图像的下方,图片中保留的是ROI区域的车道线以及建筑物、天空等背景信息,将直线区域之外的赋值为0,确定ROI,以便进行ROI区域车辆的检测。
2 车辆与道路的分割
ROI效果确定之后,需对图片进行otsu[9]法阈值分割。虽然otsu方法是常用的图像分割方法,但其并不是对感兴趣区域进行阈值分割,而是对整幅图片,效果通常不是很理想。为了尽量去除路旁景物的干扰,本文在确定了图片的ROI后,再进行阈值分割,因此能够清晰地分割出车辆与背景部分。
2.1 最大类间方差法原理[9,10]
Otsu是一种能够较好的自动分割出前景与背景的阈值分割方法。若图片中前景与背景的分割阈值记为t,前景点数比例和背景点数比例分别为w0、w1,它们平均灰度分别为u0、u1。则整幅图像总平均灰度为:

灰度值按照从小到大开始遍历t,使得公式(3)中g达到最大,则t即为最佳阈值。

2.2 对兴趣区域阈值分割
对原始图像进行otsu阈值分割后结果如图2(b)所示,仍没有区分开车辆与路边建筑、树木等背景部分。将图片进行哈夫变化,确定ROI效果后如图2(c)所示。再在其基础上进行otsu阈值分割,效果如图2(d)所示。由图2(d)可见,去除了外界干扰,车辆与道路能够较清晰的区分开。
3 车辆定位
在不存在噪声的理想情况下,若ROI区域内无车辆,阈值分割后,图像ROI区域内每行/列平均灰度值为255;反之,ROI内车辆存在位置的行/列平均灰度值小于255。因此,计算出ROI内每行/列的像素个数,就可以确定车辆位置。因此,根据该方法就可以判断像素点是否属于ROI。
本文将非ROI区域像素点所在的行记为i, 所在列记为j,像素值为(i*j)%256。扫面全图,将像素值不等于(i*j)%256的像素点计入ROI区域。在非ROI区域中,像素值与其所处位置息息相关,这将大大减少了非ROI区域像素值与ROI区域像素值重复概率。本文实验测试50帧,其中每帧测试60行,检测结果中ROI区域像素准确行数为2930,剩下的60行中,错误像素点个数也10个之内,达到了99 %以上准确率。实验结果表明,本文所方法简单、精确,能够很好应用于图像ROI区域行/列像素值的检测。
确定ROI区域后,求出该区域内每行/列像素平均值。若图像中存在车辆,如图2(d)所示,ROI区域像素值为零,其每行/列像素平均值也将小于255,因此在考虑噪声干扰的情况,本文阈值取250。不难看出,图中ROI区域存在不少椒盐噪声,这将影响平均灰度值的准确度。去除椒盐噪声的方法很简单,只需判断值为0的像素点周围像素值是否为255,若是,则取该像素值为255。将图2(d)除去椒盐噪声后的效果图如图3所示。

图2 原图图像的分割过程

图3 滤除噪声后图像

图4 车辆位置的确定
噪声去除后,需计算ROI区域内行列的平均灰度值,当平均灰度值小于阈值时,记下该点行列数,依此陆续得到最小、大行和列。在图像ROI区域确定过程中,将损失车辆部分信息,影响车辆高度确定的精确度。因此,可以假设车辆高度等于车辆宽度,如图4。该假设不会对距离的测量及车辆位置的确定有任何影响。
4 实验结果
实验视频选取:
http://trace.eas.asu.edu/yuv/index.htm l。视频特点:单一车辆,高速公路,阴天。格式:YUV;长度:3000帧;分辨率:352*288。本文对整个视频进行处理,检测结果如表1所示。

表1 高速公路视频检测结果
表1中,正确检测是指有车辆时,能够准确标志出车辆位置,无车辆时,不会虚报;误检是指错误的检测出存在车辆;漏检是指未能准确地检测出前方存在车辆。其他是指算法由于某种原因没有检测出来的部分,但不会对驾车构成威胁。因此,正确检测和其他均可算为准确计算,准确度达到98%以上,漏检概率为1.73%。导致漏检的原因是前方车辆距离越远,图像中像素个数就越少,若前方车辆距离本车超过80米,ROI区域中车辆在进行二值化后与像素个数比值低于设定的阈值。若距离不断加大,对本车辆没有危险;若距离减小,将及时做出警报,所以,漏检对本车驾驶不会构成任何威胁。误检概率为0,原因很简单,因为确定了ROI后,ROI区域内就只包括道路背景和目标车辆,再使用Otsu进行最佳分割,大大提高了检测精度。
由此,准确确定ROI区域是正确检测的关键。对该视频车道线的检测结果如表2所示。

表2 车道线检测结果
表2中,成功检测车道是指准确检测到道路两侧车道;检测车道失败是指没有成功检测出两侧车道;其他是指检测到一边路边护栏,但这不会对ROI确定造成影响。但车道检验失败是造成误检的重要因素,会使更多路旁的干扰物进入,导致ROI过大。本实验视频中,道路简单,干扰少,不会导致误检,正确检测道路概率达到了98%以上,效果十分好。但应用于别的道路,有可能增加误检概率。
5 结束语
本文研究车辆定位检测算法,首先确定兴趣区域ROI图像,接着对其进行最大类间方差法分割图像,去除背景信息,最后计算ROI内灰度值来确定车辆位置信息。实验结果表明文中使用的方法便捷,能有效进行车辆检测,具有一定应用价值。
[1] 车晓.我国汽车驾驶人过2亿 交通安全任重道远[J].道路交通管理.2013,3,9.
[2] Lin,T.-T.,Tsai,A-C.,et al.A real-time stereo vision system for obstacle detection and ecognition.American Society of Agricultural and Biological Engineers Annual International Meeting 2012 6,pp.4943-4959 .
[3] Takeo Kato, Yoshiki Ninom iya, Ichiro Masaki.Preceding vehicle recognition based on learning from samp le images[J].IEEE TRANSACTIONS ON INTELLIGENT TRANSPORTATION SYSTEMS.2002,3(4):252-260.
[4] Y ing C K, Neng S P,Yen F L. V ision-based vehicle detection for a driver assistance system [J].Computers &Mathematics w ith Applications, 2011, 61(8),2096-2100.
[5] 迟健男,张朝晖,周楠楠等.基于特征的车辆目标复合探测方法研究[J].仪器仪表学报,2008,29(12):2553-2558.
[6] 高德芝,段建民,于宏啸.基于激光雷达和摄像机的前方车辆检测[J].北京工业大学学报.2012,38(9):1337-1342.
[7] 曾庆跃, 丁友东.旧电影中基于Hough变换直线划痕的检测[J].计算机工程与设计,2010,31(4):843-846.
[8] 滕今朝,邱杰.利用Hough变换实现直线的快速精确检测[J].中国图象图形学报,2008,13(2):234-237.
[9] 范九伦,赵凤.灰度图像的二维Otsu曲线阈值分割法[J]电子学报.2007,35(4):751-755
[10] 刘健庄,粟文青.灰度图像的二维Otsu自动阈值分割法[J].自动化学报,1993,19(1):101-105.
猜你喜欢
艺术家(2023年8期)2023-11-02 02:05:28
北京航空航天大学学报(2022年6期)2022-07-02 02:00:02
小哥白尼(军事科学)(2022年2期)2022-05-25 13:19:30
卫星应用(2021年11期)2022-01-19 05:13:02
科学大众(2021年9期)2021-07-16 07:02:50
高技术通讯(2021年3期)2021-06-09 06:57:48
中国交通信息化(2020年11期)2021-01-14 03:30:34
红领巾·萌芽(2019年8期)2019-08-27 15:30:15
自动化学报(2017年5期)2017-05-14 06:20:56
光学精密工程(2016年1期)2016-11-07 09:01:59
