
基于卡尔曼滤波器组的航空发动机传感器故障诊断
2013-10-13 13:45赵文博叶志锋王继强
机械制造与自动化 2013年3期
赵文博,叶志锋,王继强
(南京航空航天大学能源与动力学院,江苏南京 210016)
伴随FADEC(全权限数字电子控制)系统的深入发展,大量电子元件、执行机构以及传感器等在航空发动机上的广泛应用对发动机可靠性提出更高的要求,特别是发动机传感器大多工作在高温、高压、强振动等恶劣的工作环境中,传感器故障的及时诊断在业界也越来越引起广泛重视。基于卡尔曼滤波器组的传感器故障诊断方法是一种相对比较成熟的诊断算法,且在F100等发动机上已经成功验证。
本文以某型涡扇发动机为例,选取高压转子转速Nh,低压转子转速Nl,燃烧室出口温度P4及出口压力T4等4个传感器为研究对象,探讨验证应用卡尔曼滤波器组进行传感器软故障、硬故障诊断的可行性,在前人应用此法进行传感器故障诊断的基础上,特别论证了在发动机供油动态的情形下,该方法依然能对传感器的突变及漂移故障进行有效检测。
1 卡尔曼滤波器组进行传感器故障诊断的原理
传感器故障诊断的原理如图1所示,W和V表示为发动机系统噪声以及测量噪声,用U表示发动机的输入供油量,Y表示发动机的输出量Nh,Nl,P4,T4,每一个传感器对应一个卡尔曼滤波器[1-2](卡尔曼滤波器可以通过测量与被提取信号的相关量计算估计出所需要的信号,此被估计信号是由白噪声激励引发的),该滤波器的输入信息为除该传感器外其余三个传感器的观测输出信号,如对应Nh传感器的滤波器的输入信息为Nl,P4,T4三个传感器的观测输出信号。图1中滤波器Filter0的输入信息为所有传感器的观测输入信号。将滤波器的输出信息进行处理,形成一组残差加权二乘方的统计量WSSR。

式中,卡尔曼滤波器的估计值与卡尔曼滤波器输入值之差e为残差,第i个卡尔曼滤波器的残差为:

其中σ是传感器的标准偏差。
将WSSRi与WSSR0做差,得到:

这里,如果第i个传感器产生故障,那么第i个卡尔曼滤波器由于没有使用对应的故障传感器的观测信息,因此它的估计结果是正确的。而其他的卡尔曼滤波器由于使用了故障传感器的输出信号使得估计结果都偏离了实际情况,根据式(1)(2)(3)可知,除了产生故障的传感器所对应的WSSRi值没有受到故障影响外,其余WSSR值明显偏大,而根据公式(4)可知,故障传感器所对应的LRi也明显偏大。由此,在设定一个经验阈值的情况下,低于阈值的WSSRi也就是超出相应阈值的LRi所对应的传感器即为故障传感器。阈值的选择一般由发动机实际的数据经验及传感器自身的噪声特性决定[3]。该方法对单个及多个传感器故障都能够进行有效诊断。
在以往的做法中,习惯将传感器的故障区分为硬故障及软故障[4],硬故障通常指传感器观测信号瞬时发生较大阶跃或突变,软故障通常指测量值产生缓慢变化,对传感器软硬故障的诊断,以往习惯采用不同的诊断逻辑,实际上软硬故障都可通过上述方法进行判别,只是对应的阈值不同而已。

图1 应用卡尔曼滤波器组进行传感器故障诊断原理
2 供油动态时传感器的故障诊断
以上给出的是发动机在稳态即发动机转速稳定的情况下,应用卡尔曼滤波器组对发动机传感器进行故障诊断。在供油wfb变化中,转速发生变化,此时,传感器也可能发生故障,因此,在供油变化过程中,确保发动机在传感器发生故障的情况下的正常运行尤为重要。
根据发动机部件级非线性模型拟合出发动机线性模型[5-6],预存对应每个高压转速的发动机线性模型以及卡尔曼滤波器。这样在燃油wfb变化的过程中,发动机传感器的故障诊断流程如图2所示。故障诊断核心部分仍然同上,只是根据n2变化完成诊断模式的切换。在wfb变化中,根据不断变化的n2就近判定发动机线性模型以及相应的卡尔曼滤波器,进而根据实时的滤波残差统计量WSSR值来判定传感器的故障发生情况。在本文中,高压压气机相对转速在85%100%之间时,每一个对应相对转速的整数点自动完成一次模型切换,当实际转速落于两整数转速点之间时,就近选取线性模型与卡尔曼滤波器。

图2 燃油动态变化过程中传感器故障诊断流程图
3 仿真试验
为验证上述理论,进行如下仿真试验。图3给出的是在某稳态点高压转速传感器发生1%硬故障的诊断效果,红虚线代表设定的阈值图3a。由图可知,只有WSSR1小于阈值,可以判断是高压转速传感器发生故障。图4仿真了在某稳态点上高压转速传感器发生软故障即漂移故障的诊断效果,从图中可看出,在设定好阈值的情况下,不超出阈值的WSSR1所对应的高压转速传感器发生了故障。图5给出了在616 s过程中,第二个传感器Nl和第三个传感器T4发生2%偏离的情况下,系统的故障诊断情况。由图可知,在相应故障发生的时间段内,LR2和LR3超出阈值,可以判定此处两个滤波器对应的传感器发生故障图5b、c。
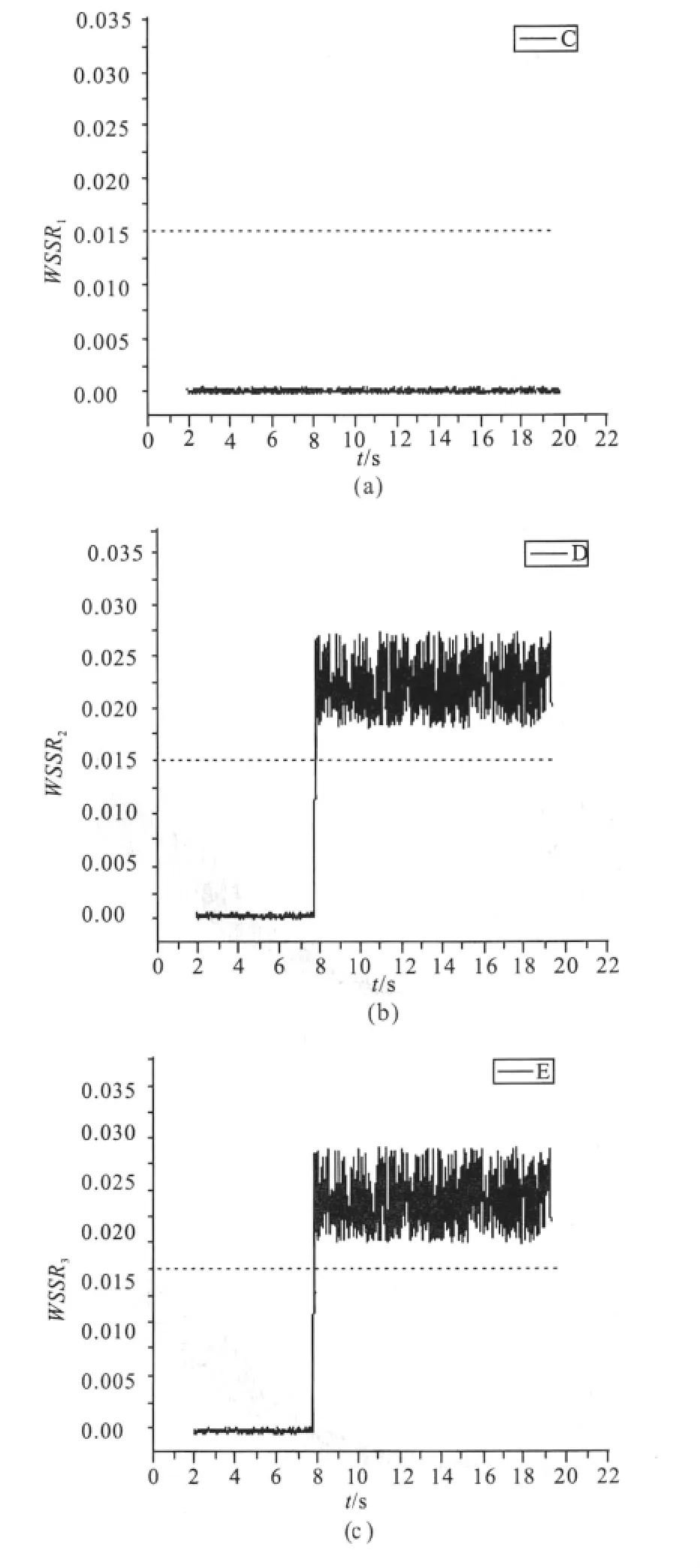
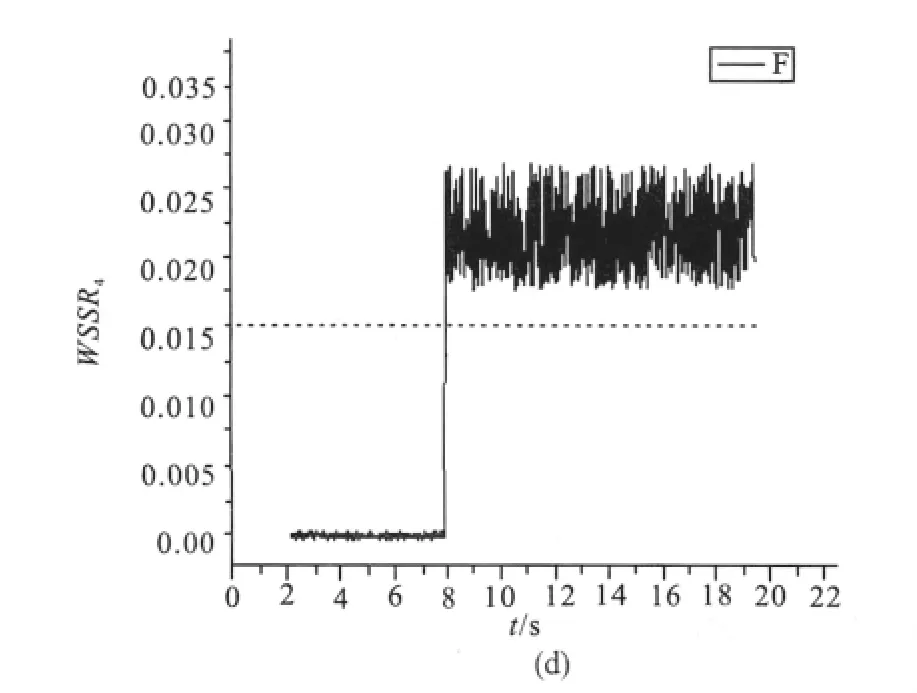
图3 某稳态点高压转速传感器1%硬故障诊断效果图


图4 某稳态点高压转速传感器软故障诊断效果图


图5616 s过程中Nl和T4发生2%偏离时故障诊断情况图
对于多个传感器同时不同步发生软故障的情况,在612 s时,Nh发生软故障,在1018 s时,T4发生软故障,故障诊断情况如图6所示。根据仿真效果可知,应用此法进行两个传感器前后发生软故障的诊断依然是可行的。

图6 612 s时Nh故障和1018 s时T4故障诊断情况图
下面检验燃油动态情况下,传感器的故障诊断情况。在t>3 s时,对燃烧室出口温度P4传感器添加+3%的硬故障,在一定的供油条件下,动态故障诊断效果如图7所示。从仿真效果看到,在图7左上角显示的供油wfb动态变化情况下,只有WSSR4小于阈值,由此判断,P4传感器发生故障(图7c)。
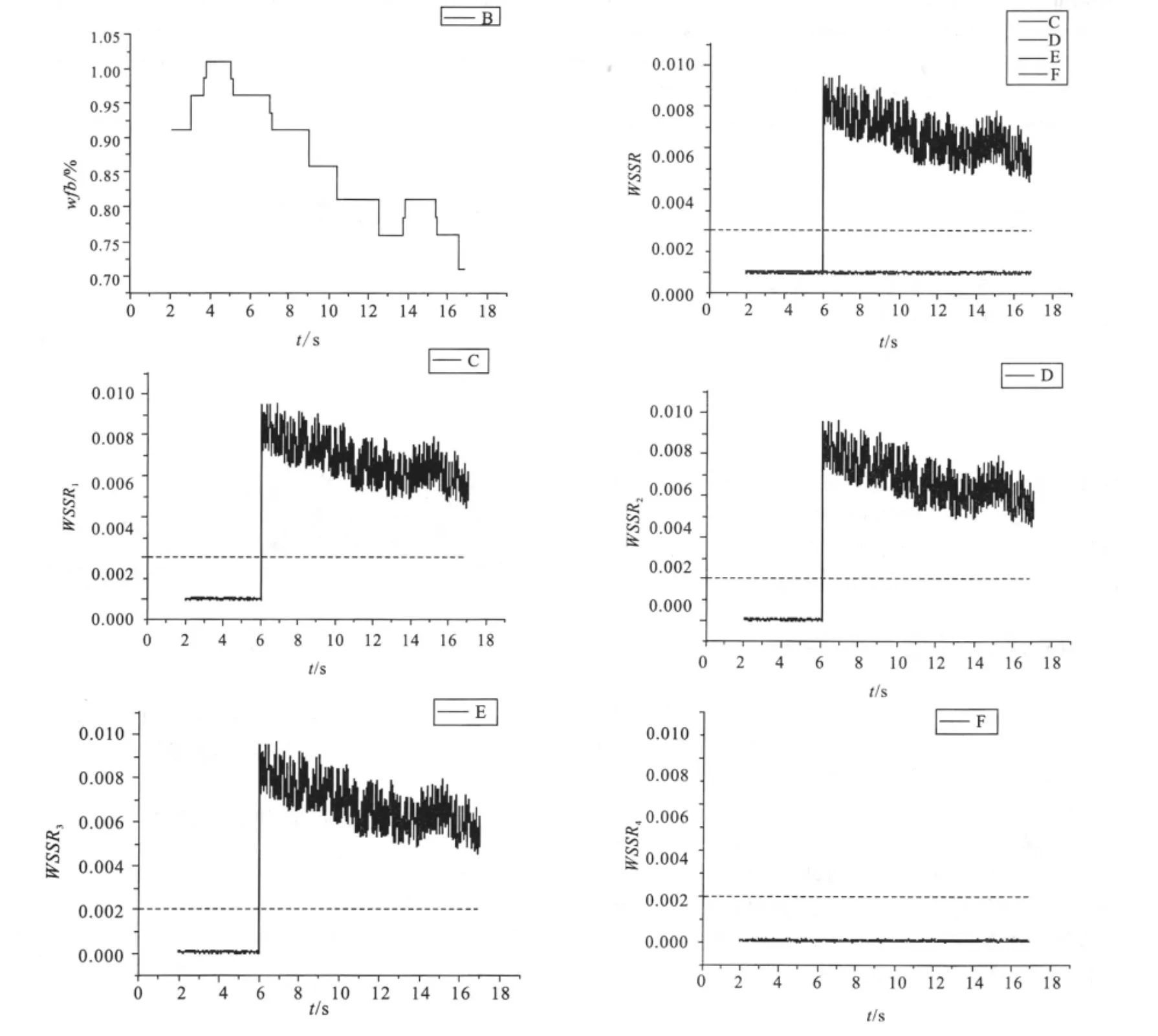
图7 燃油动态情况下P4发生3%硬故障诊断效果图
4 结论
本文在卡尔曼滤波器组处理发动机传感器信号的基础上,应用特定的滤波残差处理方法进行了传感器故障诊断分析,在设定好经验阈值的条件下,可以通过判定残差处理结果从而有效诊断单个或多个传感器故障发生情况。通过仿真实验证明,本文所采用的基于卡尔曼滤波器组的发动机传感器故障诊断系统能够实时准确地对单个或多个发动机传感器的软硬故障进行良好诊断。特别在燃油动态变化的过程中,该方法依然具有良好的诊断效果。
[1]A.J.Volponi,H.DePold,R.Ganguli,etal.The Use of Kalman Filter and Neural Network Methodologies in Gas Turbine Performance Diagnostics.Engineering for Gas Turbines and Power[J].2003:917-922.
[2]Takahisa Kobayashi,Donald L Simon.Application of a Bank of Kalman Filters for Aircraft Engine Fault Diagnostics[R].NASA TM-2003-212526,2003:25-27.
[3]WalterC.Merrill,JohnC.Delaat,WilliamM.Bruton,Advanced-Detection,Isolation,and Accommodation of Sensor Failures-Real-TimeEvaluation, NASA TechnicalPaper, USA, 1987:101-134.
[4]许秀玲,郭迎清,王镛根,等.某型涡扇发动机控制系统传感器故障诊断研究[J].航空动力学报,2004,19(1):164-168.
[5]HUANG Xiang-hua.Sensor Fault Diagnosis and Reconstruction of Engine Control System Based on Autoassociative Neural Network[J].Chinese Journal of Aeronautics.2004.4(1):23-27.
[6]鲁峰,黄金泉,陈煜.航空发动机部件性能故障融合诊断方法研究[J].航空动力学报,2009,24(7):1649-1653.
猜你喜欢
北京航空航天大学学报(2017年9期)2017-12-18
电源技术(2016年9期)2016-02-27
重庆工商大学学报(自然科学版)(2015年10期)2015-12-28
电源技术(2015年1期)2015-08-22
航运交易公报(2014年10期)2014-04-02
航运交易公报(2014年10期)2014-04-02
振动、测试与诊断(2014年5期)2014-03-01
机械与电子(2014年1期)2014-02-28
河南科技(2014年3期)2014-02-27
电子设计工程(2014年6期)2014-02-27
