电动机无功补偿实验方法研究
2013-10-12 03:28:46白连平
电气电子教学学报 2013年6期
白连平,张 利,祁 鲲,张 芳
(北京信息科技大学自动化学院,北京100192)
为了培养电动机节能技术方面的人才,我校电气工程及其自动化专业开设了“电机节能技术”课程。为了配合理论教学还开设了“电机节能技术实验”课程。在实验课程中设置了电动机静态无功补偿和电动机动态无功补偿的实验内容。为此,本文根据教学大纲的要求及现有电动机节能实验室的情况,设计了电动机无功补偿实验装置并编写了电动机无功功率的静态阶梯补偿和动态跟踪补偿实验讲义。这些工作为学生学习和掌握电动机无功补偿节能方法创造了良好的条件。
1 实验装置和主要实验内容
电动机节能实验主体装置如图1所示。
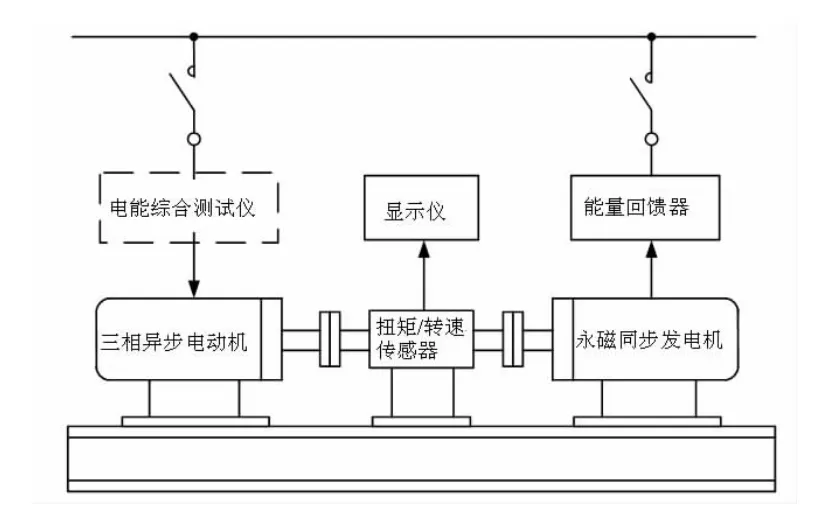
图1 电动机节能测试实验装置
装置主要由三相异步电动机、扭矩/转速传感器、扭矩/转速显示仪、永磁同步发电机、能量回馈器、电能综合测试仪、装置底座和三相调压电源等组成。其中永磁同步发电机和电能回馈器用于电动机的加载,在加载过程中只有少部分能量消耗在电动机和发电机上,大部分能量又回馈到电网,避免电动机节能测试过程中消耗大量的电能。因此这种加载装置比电磁涡流制动器和磁粉制动器优越得多,而且加载平滑性好。扭矩传感器是非接触式电阻应变传感器,测量精度高、可靠性高,其精度能达到0.5%。转速传感器通常采用光电编码形式,测量精度能达到0.1%。电能综合测试仪能够直接测量三相异步电动机的输入电压、电流、有功功率、无功功率、视在功率、功率因数和电源频率等。
电动机节能技术实验主要内容有:①实验装置和电能综合测试仪使用方法;②电动机综合效率测试和计算方法;③双功率电动机节能方法研究;④变频调速系统的效率测试及研究;⑤电动机静态无功补偿的研究;⑥电动机动态无功补偿的研究;⑦变频通风系统的节能测试及研究。前3个实验是必做实验,共4个学时。其它为任选内容,共4个学时。
2 电动机静态无功补偿实验
众所周知,三相异步电动机是感性负载,在运行中除了消耗有功功率外,还要从电网吸收无功功率,而传输无功功率就会使线路产生附加损耗。在电动机进线端并联电容使传输线路中电流减小,传输线路电阻损耗就会减少,这就是电动机无功补偿节能原理[1,2]。
三相异步电动机无功补偿电容器为固定值,不随负载变化而调节,这就是静态无功补偿。三相异步电动机从空载到满载无功功率变化比较大。相对于某一稳定的负载,选择一个合适的电容器进行无功补偿是可以的[3]。如果负载变化范围比较大,但相对稳定,可以采用静态阶梯补偿方式。本实验设计的阶梯补偿电路如图2所示。
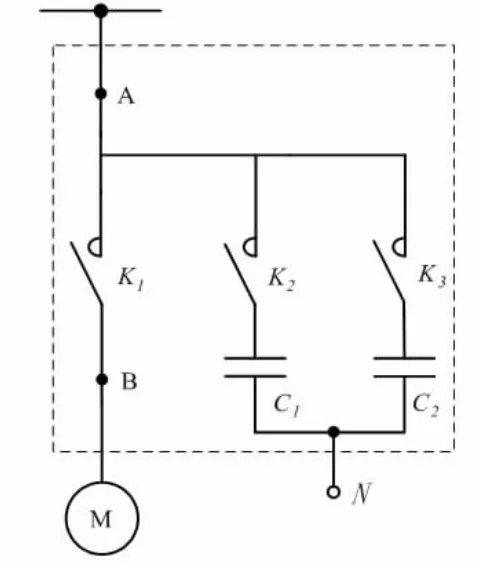
图2 电动机阶梯补偿实验电路
静态补偿电容器安装在电动机控制柜内,电动机接线端子接到控制柜电源输出端。图中电源、电动机和电容器的三相线都用一根线表示,虚线表示控制柜。电动机加载装置如图1所示,电动机为4极3kW。图2是静态补偿装置,其中C1标称值为2kvar,实测值为1.906kvar;C2标称值为0.5kvar,实测值为0.535kvar。电动机空载无功功率约为2kvar;满载无功功率为2.5kvar。电动机节能实验装置最小负载为0.25kW,因此负载功率P2从0.3kW开始。轻载时将C1投入,接近满载时再将C2投入。具体测试方法是在图2中A点和B点各接一台电能综合测试仪(3169-20),同时测量电动机无功补偿前后的有功功率P1、无功功率Q、功率因数cosφ、平均电压Varc和平均电流Iave,测得的数据如表1所示。
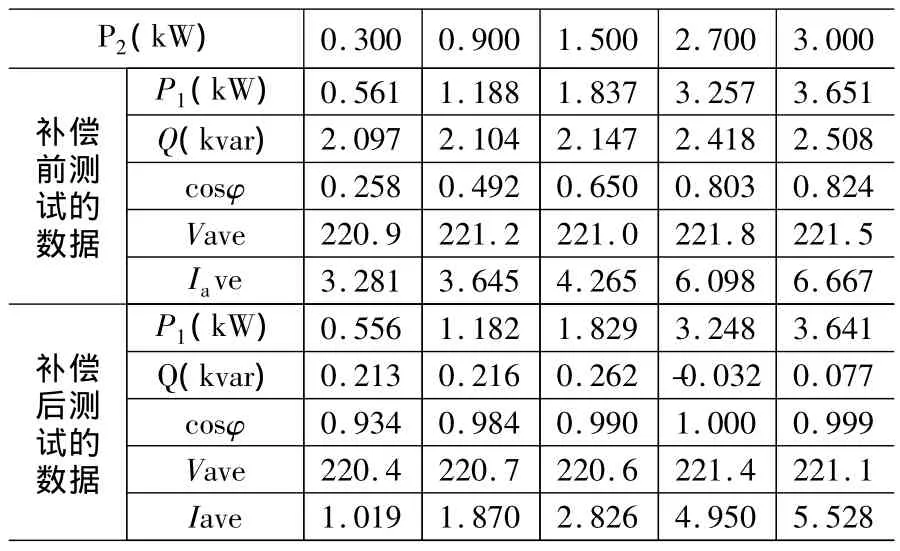
表1 电动机(3kW/4极)静态阶梯无功补偿测试数据
从表1中的数据可以看出:①补偿后有功功率比补偿前略小几瓦,原因是补偿点和测试点之间的线路损耗减小;②补偿后无功功率比补偿前明显减小,随着负载增大无功功率逐渐增大。负载为2.7kW时,再将C2投入,此时有一点过补;③补偿前,功率因数从0.258逐渐增加到0.824,轻载时功率因数很低。补偿后功率因数很高,从0.934逐渐增加到0.999,可见无功补偿效果很好;④补偿前后电压基本不变;⑤补偿前后电流变化明显,轻载时电流减小很多,接近满载时电流减小1A左右。
3 电动机动态无功补偿实验
对于在一个周期内波动较大的特殊负载,利用阶梯补偿方法无法取得满意的效果。比如,油田采油用的抽油机和钢厂的轧钢机等,平均功率因数很低。对于这种特殊负载,必须采用动态无功补偿方式。动态无功补偿方式主要有两种:一种是基于晶闸管(TCR)相位控制的动态无功补偿,简称为SVC补偿方式;另一种是基于可关断器件(比如IGBT)控制的动态无功补偿,简称为SVG补偿方式。本文采用晶闸管相位控制的动态无功补偿电路。
3.1 晶闸管相控动态补偿电路原理[1]
晶闸管相控动态补偿电路原理如图3所示。图中每组反并联晶闸管分别与电容器串联,再接成星形,构成动态补偿主电路。在补偿容性无功功率时,为抑制冲击电流需在主电路中串入电抗器。晶闸管相控动态补偿电路还包括:同步相位检测电路、电压电流检测电路、单片机检测控制电路和同步脉冲触发电路。下面分别介绍各部分电路的工作原理。
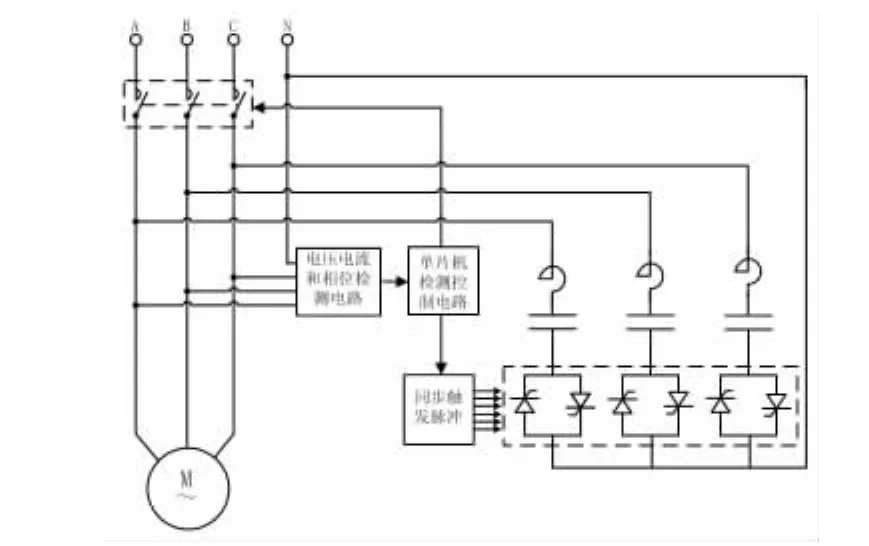
图3 晶闸管相控动态补偿电路原理框图
(1)电压电流检测电路
图3中的检测电路包括两部分,一部分是同步相位检测电路,如图4所示。另一部分是电压电流检测电路。相位检测电路分别检测A、B、C三个相电压的过零点,图中只画出A相,其它两相与之相同。检测到三个相电压过零点信号经过光耦隔离送给单片机。电压电流检测电路可采用电压互感器和电流互感器检测,将采集的电压和电流信号经过处理送至单片机。
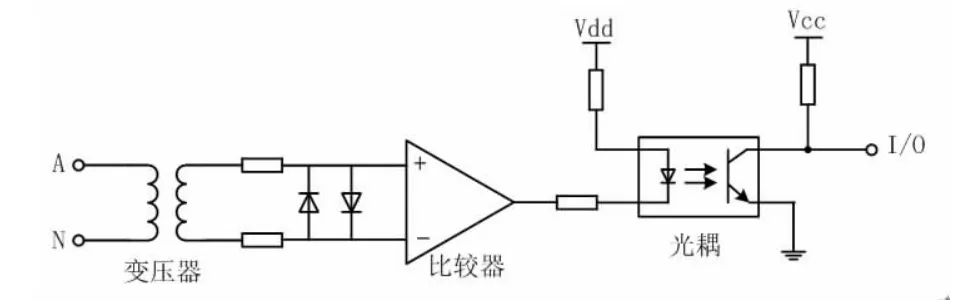
图4 同步相位检测电路原理图
(2)单片机检测控制电路
为了计算相位方便,可采用具有交流信号A/D采集功能的单片机。如果是单向A/D采集的单片机,则还需有电压与电流相位比较电路。单片机根据电压、电流以及检测到相电压和相电流之间的相位差,计算出电动机在△t时间内每一相的无功功率△Q。即

式中,Up和Ip分别为相电压和相电流。
(3)同步脉冲触发电路
同步脉冲触发电路如图5所示。图中的同步脉冲触发电路主要包括两部分:一部分是单片机发出的同步脉冲信号,另一部分是脉冲变压器。脉冲信号经放大送给脉冲变压器输入端。脉冲信号经脉冲变压器增强,形成强触发信号输出到晶闸管的门极,从而可靠地触发晶闸管。晶闸管同步脉冲触发电路共有六路,每两路驱动一组晶闸管。
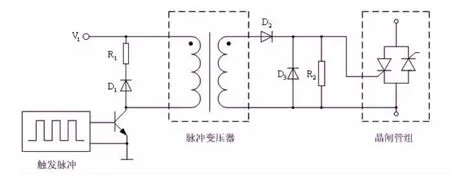
图5 晶闸管同步脉冲触发电路
3.2 晶闸管相控无功调节方法
晶闸管相控无功调节方法:设每个采集时间为△t,即步长。在第一个△t检测每一相的无功功率为△Q,在下一个△t时间内补偿无功功率为△Q。晶闸管相控无功调节是调节电容上电压,电容电压是与触发角相关的斩波电压,即非正弦电压。此时电容无功功率为

式中,Uα是触发角为α时对应的非正弦电压有效值。取△t时间内补偿无功功率△Q等于斩波电压在电容上产生的无功功率Qc,即

利用上式和有效值定义可以推得触发角α与无功功率的关系为

式中,ω为电源角频率,C为电容值,Um为正弦电压的幅值。
这是一个关于触发角α的超越方程,直接求得α角很困难。可以先求出各触发角所对应的无功功率,比如分别取α=0°,2.5°,5°,……,180°,其对应的无功功率为ΔQ=ΔQ1,ΔQ2,……,ΔQ72,然后根据测得的无功功率在对应的两点之间进行插值求得触发角α。
无功调节步长△t可以根据负载变化的周期来确定。负载变化快,步长△t可以小一些;负载变化较慢,步长△t可以大一些。
由图3和上面的分析和计算可以看出,这种动态补偿是滞后跟踪控制,是开环控制。在一个步长的时间内(比如△t=200ms)检测电动机的无功功率是多少,在下一个△t开始时就补偿多少,同时检测下一个△t的无功功率。根据瞬时无功功率计算出触发角α,再计算出六路触发脉冲的相位,由单片机定时发出六路触发脉冲,控制六个晶闸管,实现电动机的动态无功补偿。
3.3 动态无功补偿实验结果
晶闸管相控动态补偿实验电路如图3所示。测试方法与静态无功补偿测试方法相同,在电动机加载的过程中,利用电能综合测试仪测试电源端和电动机的有功功率、无功功率、功率因数、平均电压和平均电流,测得数据如表2所示。
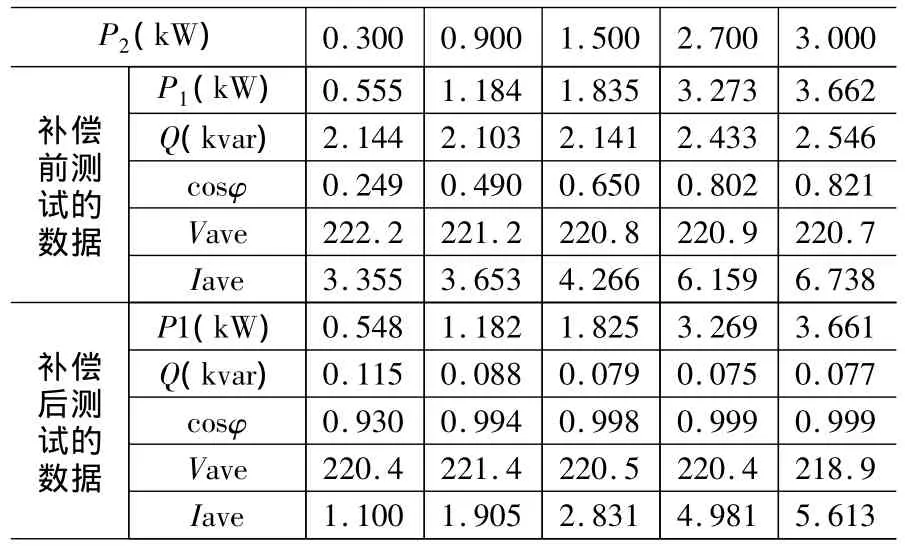
表2 电动机(3kW/4极)动态无功补偿测试数据
从表2中的数据可以看出:①补偿后有功功率比补偿前略小几瓦,这一点与表1中的数据相似;②动态补偿后无功功率大大减小;③补偿后功率因数很高,都在0.9以上,可见无功补偿效果很好;④补偿前后电压基本不变;⑤补偿前后电流明显减小。
4 无功补偿节能效果的计算
电动机无功补偿的节能效果可以采用两种方法计算。如果传输线路的电阻已知,可以利用下面的公式计算

式中,△Pq为电动机无功补偿的节电功率,I1q为补偿前的电流有效值,I1h为补偿后的电流有效值,R为每根线路电阻。
另一种方法是利用无功经济当量计算

式中,Q1q为补偿前的无功功率,Q1h为补偿后的无功功率,k为无功经济当量系数。当电动机直连发电机母线或直连已进行无功补偿的母线时,k的取值为0.02~0.04;二次变压取值为0.05~0.07;三次变压k取值为0.08~0.1。
在上面的无功补偿测试中,实验室到三次变压器的传输线路电阻未知,因此可以利用无功经济当量的方法计算无功补偿的节能效果。无功经济当量系数k可取0.08。由于负载不是某一确定的负载,不妨计算上述各点的平均值。对于静态阶梯补偿,无功补偿平均节能为

将表1中无功功率数据代入可得

对于动态补偿,利用表2中无功功率数据,可得

由上述计算可见,动态无功补偿节能效果比静态补偿效果略好一些。对于某些负载波动频率比较高,无功功率变化复杂的情况,静态补偿无法取得满意的效果,只能利用动态无功补偿。
5 结语
在电动机节能实验中,无功补偿是一项重要内容。学生通过这个实验可以掌握对电动机实施无功补偿方法、测试方法和节能效果计算方法。本文在将电动机无功补偿节能方法引入教学方面做了一些探讨,设计的电动机无功补偿实验内容及实验装置,为开设电动机无功补偿实验打下了良好的基础,在教学中也收到了比较好效果。
异步电动机无功补偿是非常重要的节能措施。国家标准中规定:中小型三相异步电动机实施无功功率补偿后,功率因数应不低于0.9。此外,对异步电动机进行无功补偿,企业将获得很好的经济效益,提高变压器利用率,提高设备的可靠性,改善电动机起动性能等。
[1] 白连平,马文忠.异步电动机节能原理与技术[M] .北京:机械工业出版社,2012。
[2] 王兆安,杨君,刘进军.谐波抑制和无功功率补偿[M] .北京:机械工业出版社,2004。
[3] T.J.E Miller.(胡国政译).电力系统无功功率控制[M] .北京:水利电力出版社,1990。
猜你喜欢
中学生数理化·八年级物理人教版(2023年11期)2023-12-26 07:50:10
现代信息科技(2022年20期)2022-11-17 07:50:20
数学物理学报(2022年3期)2022-05-25 13:33:28
防爆电机(2021年4期)2021-07-28 07:42:56
上海大中型电机(2021年2期)2021-07-21 03:01:32
中成药(2017年12期)2018-01-19 02:06:54
智能建筑电气技术(2015年5期)2015-12-10 05:52:25
智能建筑电气技术(2015年5期)2015-12-10 05:52:20
东北电力大学学报(2015年1期)2015-11-13 05:21:26
电子设计工程(2015年12期)2015-02-27 12:06:22