
未来战斗机控制模式研究
2013-10-11 02:29:54郑友胜吴家峰
教练机 2013年2期
郑友胜,吴家峰
(中航工业洪都,江西南昌330024)
0 引言
美国率先研制并装备第四代战斗机,为了继续扩大自己的空天优势,已经开始研制第五代战斗机,俄罗斯也紧随其后。第五代战斗机到底是有人驾驶,还是无人机驾驶,目前也是各国争论的焦点。然而,控制模式作为第五代战斗机的一项关键技术,必须得以突破。本文主要研究了第五代战斗机的控制模式。
1 国外发展概况以及能力需求
1.1 国外发展概况
美国在装备第四代战斗机的同时,也正在积极探索第五代战斗机[1]。2008年第9期美国《空军》杂志提出了第五代战斗机的特点:高超音速、双模式发动机和自适应的外形。随后该杂志在2009年第10期中对第五代战斗机的特点又进行了修正,细化了一些技术特征:超强隐身能力、可能具有“变体”能力、高度网络化、高度灵敏的传感器等。目前,美国第五代战斗机的发展已经由概念探讨转向前期论证,美国空军在五代机发展问题上已经迈出了实质性步伐,已经成立专门机构开展五代机特征论证[2]。
据俄新网报道,2012年3月21日,俄罗斯航空巨头米格公司展示了自己的新产品——“电鳐”喷气式隐形无人机战斗机。据称,这种飞机因具备高速、隐身和无人驾驶等特性,被称为“第六代战斗机”。其重要用途是突破敌方严密的防空系统,发射弹舱内的精确制导弹药,击毁预先侦察到的固定目标,也可以击毁地面目标和海上目标。
1.2 能力需求
第五代战斗机应具有出色的远程制空作战能力和极强的对地、对海攻击能力,同时应具备高度的自主作战能力,以夺取制空权、战略纵深打击和远海突击为主要作战使命。第五代战斗机的主要作战任务包括:防空截击、护航掩护、防空压制、对海作战、战略纵深打击、战场遮断、电子对抗和侦察/监视等。
另外,从战斗机的划分角度分析,第五代战斗机的综合作战能力应该远超越第四代战斗机,关键技术指标较第四代战斗机有压倒性优势[3],应具备远程作战、快速反应、灵活支援的能力;具备防空反导、空降作战、信息作战的能力;在飞行速度、隐身性能、传感器融合、自主控制、飞行空域、生存力、杀伤力和多任务等关键能力方面比第四代战斗机更强。除了一些关键能力优于四代机以外,五代机还应该具备反隐身、能量隐身以及激光攻击和高能微波攻击等第四代战斗机所不具备的能力。
2 控制模式
有人曾经大胆预测,第四代战斗机将是世界上发展的最后一代有人战斗机了,随着未来先进无人机技术和无人机作战平台的发展,无人作战飞机很有可能替代有人战斗机,成为未来作战飞机的发展主流。现在看来,这一预测可能不会成为现实,就目前的控制技术水平,无人机只能执行单一的对固定目标与低速目标的攻击任务,对于复杂环境下的目标和高速运动的目标,无人机还无能为力,离完全自主控制还相差甚远[3]。第五代战斗机是有人机还是无人机,目前还没有定论,各国也还在研究中。以下将分别从有人控制、自主控制和有人/自主复合控制等三个方面进行深入研究、分析利弊。
2.1 有人控制模式
第一代战斗机和第二代战斗机完全由飞行员操纵和控制,需要飞行员不断地调整飞机姿态,以保证飞机能够稳定性飞行。从第三代战斗机开始,出现的自动控制系统,可以部分代替飞行员的工作,通过自动控制系统实时调整飞机的姿态,使飞机能够稳定飞行,提高了飞机的操纵性,减轻了飞行员的负担。随着飞控技术的不断发展,越来越多的工作可以由飞控系统完成或起到很好地辅助作用,大大降低了飞行员的操纵负担。
第四代战斗机控制系统安全级别很高,配备了多台计算机,增加了飞机的控制冗余度;另外,即使在所有机载计算机都出现故障的情况下,飞行员还可以手动飞行。第四代战斗机的控制系统不是简单的飞行控制,而是“飞行、火力、动力”融合的控制系统。第四代战斗机的飞控系统高度综合化[4],体现在信息综合、显示综合、功能综合、硬件综合、软件综合和检测综合等。由于第四代战斗机采用了更为先进的控制技术和控制理念,将综合共享的概念移到传感器部分,更多的功能将由软件实现,并充分利用信息融合技术,进一步增强了飞行员的态势感知能力,提高了飞行员的判断能力,增强了战斗机的攻击能力和生存力。
第五代战斗机将配备先进的飞行管理系统,具有相当高的自主控制能力。五代机控制系统除了四代机已有的控制能力外,还应具备以下能力:
1)更强的综合信息处理能力;
2)具备故障诊断和超强的自修复能力;
3)很强的信息筛选能力;
4)飞行路线重规划、飞行任务重规划、初具规模的协同作战能力;
5)具备自主起降能力,确定目标类型后可以自动选择武器发起攻击,并且攻击时间大大缩短。
对于第五代战斗机,飞控系统像是一个能力很强的“助手”,而飞行员则是一个“决策者”和发布命令的“老板”;大多数情况下是战机的飞控系统来完成操作,飞行员的主要职责是基于复杂环境下多目标的任务决策、重要信息判断、临时应变、干扰和程序中断、严重故障等意外情况的处理。装备更为先进的智能控制系统后的第五代战斗机,将会大大降低飞行员的操作负担,简化操作程序,使飞行员能够更专注于执行战斗任务。
2.2 自主控制模式
2.2.1 自主控制相关概念
文献[6]给出了自主控制的定义,认为自主控制是通过在线感知、信息处理和控制重构等功能,在不确定环境里和无人干涉的条件下,以最优的方式执行控制策略,自主、快速有效地适应环境,实现场景描述、故障检测、策略规划、避障控制等功能。自主控制强调自我决策、自我控制,可看作是自动控制的高级发展阶段。
美国国防部在 《无人机系统路线图2005-2030》中公布的自主控制趋势[5],如图1所示。
从图1中可以看出各无人机型号与无人机10个自主控制级别之间的对比关系。由图可知,自主等级在5以下的,任务相对简单,可以由单机完成,而自主等级在5以上的任务,需要多机协同完成。目前,美国先进的无人机仅处于等级4~5之间的水平,离完全自主机群的级别还有很大的差距[7]。
为了衡量第五代战斗机系统的自主水平,需要对自主能力进行合理的等级划分。文献[7]在研究美国无人机自主等级的划分之后,提出了一种新的无人机发展的自主控制等级(表1)。
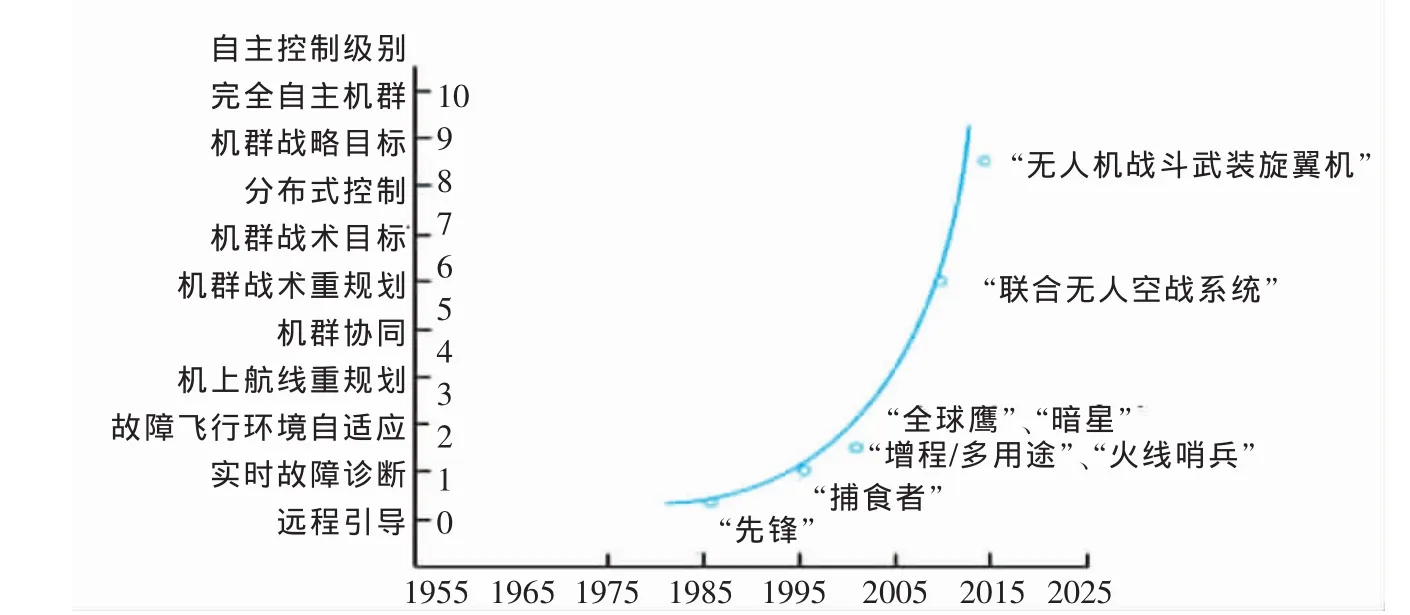
图1 2005版美国无人机发展路线图
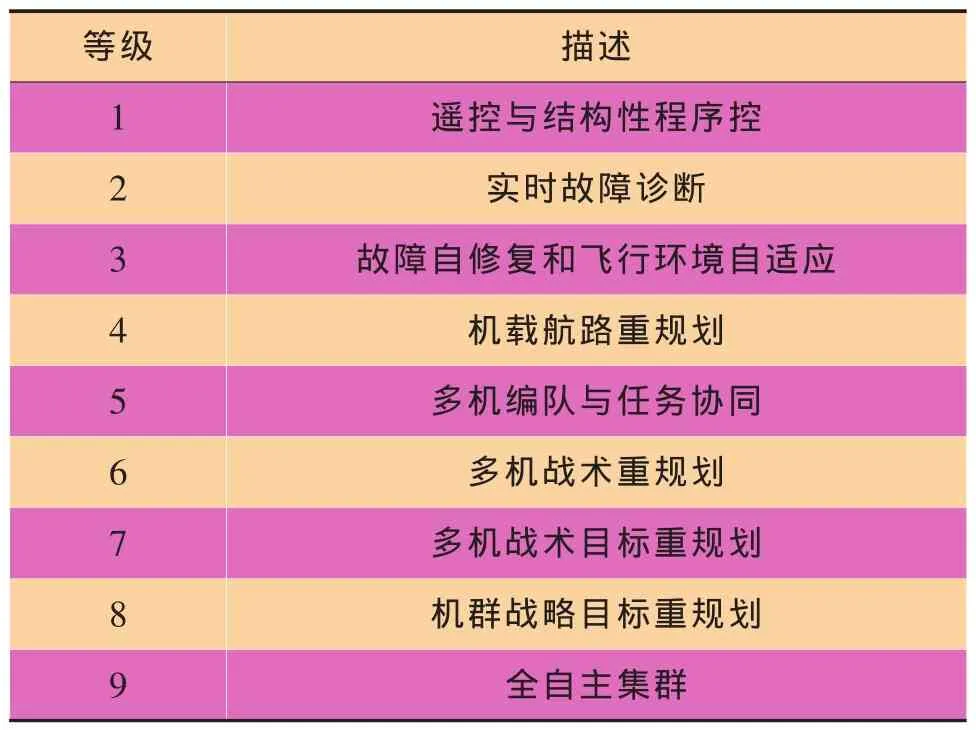
表1 自主水平等级
与美国无人机自主控制10级划分相比,表1中给出的无人机自主控制9级划分的等级次序与其相同,等级命名经更改后全部反应该等级的军事应用特征,还取消了不能归为智能活动的分布式控制等级。
2.2.2 自主控制的主要技术特征
国内外学者对自主控制的关键技术进行了大量深入的研究。文献[8]认为进行自我决策、自我控制是实现自主控制的一个重要标志;文献[9]认为自主控制需要具备通信、协调、目标识别与分配、冲突自动化解等能力;文献[10]指出自主控制需要提供人机接口、通信和目标识别等功能;文献[11]、[12]认为态势感知、决策分析、通信协同和实时目标重定位是自主控制必须具备的几项重要能力;而文献[13]认为时空建模、智能分层控制、嵌入式计算和网络化通信是实现自主控制的关键。
本文根据第五代战斗机的作战使命和能力需求,分析自主控制系统需要完成的主要任务有:防空截击、防空压制、对空作战、对地攻击、对海作战、战略纵深打击、战场遮断、电子对抗和侦察/监视等。完成这些任务,第五代战斗机的自主控制系统必须具备的主要能力有:
1)自主控制系统结构。自主控制系统是一个系统阶次高、子系统相互关联,系统评价目标多且相互矛盾的复杂大系统,是多个学科的交叉[14]。自主控制系统主要任务是把各个子系统连接成一个整体,统一管理调度各个子系统,使各子系统步调一致地完成总体任务,其设计的优劣直接关系到无人操作时的第五代战斗机整体性能的发挥和智能水平的高低。
2)多传感器信息融合能力。未来战场环境日益复杂,要完成作战任务,必须充分、准确地获取敌我双方信息。由于获取的信息量大,要从众多的信息中获取所需信息,并对这些信息进行合理利用,必须发展多传感器信息融合技术,使第五代战斗机具有对多种信息获取手段所获得的信息进行分析和处理的能力。
3)协同与交互能力。协同与交互技术主要解决无人机与无人机、无人机与有人机之间以及任务控制站、指控系统的协同操作,实现各机种间的协同作战。
4)自主决策与控制能力。有人机上对于不同的目标和不断变化的战场环境,飞行员会择机选择相应的操作,如攻击武器、攻击方式、攻击时刻和机动规避等。对于无人机,如果这些都是由操作手来完成,那么对于打击一些稍纵即逝的机动目标和即时发现的时敏目标,必然会贻误最佳作战时机。因此,无人操作时,需要具备自主决策能力,主要包括目标威胁判断、攻击武器、攻击方式、攻击时刻、权限降级、自主规避、攻击排序、火力分配和武器投放等。
5)快速动态重规划能力。当五代机收到新的传感器信息、命令、情报或不可预料事件发生时,就要进行实时动态重规划,以最优的方式完成对预先任务规划的更新,包括航路重规划、攻击任务重规划和攻击目标重锁定等,生成新的任务。具备快速动态重规划技术后,五代机可以根据当前的态势和对未来一段时间内态势的估计,结合预测控制技术,选取合适的应飞轨迹、攻击目标或武器种类,从而赋予五代机灵活执行任务的能力。
2.3 有人/自主控制模式兼容
目前世界上最先进的战斗机仍然是有人驾驶的。由于人这一“高级动物”的加入,使得战斗机在空中执行任务时,变得更加灵活,可以因时、因地、因空和因海而变,可以进行大规模的机群协同作战,在过去的海湾战争、伊拉克战争、阿富汗以及叙利亚战争中发挥了极其重要的作用。然而,战斗机在执行高机动大过载飞行任务、恶劣天气、恶劣环境、超高空飞行和超长时间飞行等超过人的生理和身体极限的任务,飞行员将无法完成。
有人战斗机的这些不足,可以由无人战斗机进行有效弥补。无人机要想取代有人机执行作战任务,在作战时需要能像战斗员一样能够结合任务、态势、环境和信息等实时决策,做出正确地判断并有效执行才能完成任务。这就要求无人战斗机的自主控制系统具备“人脑”一样的智能。无人机技术发展最好的国家是美国,美国在2005年发布了最新的美国无人机系统发展路线图,该路线图将无人机的发展划分为10个级别。在这个界别划分中,5级以下反应了单机的最高自主水平,从第5级开始描述多机的自主控制能力,而7级~10级是美军未来的发展方向,理论和技术上还处于探索阶段[15]。美国最先进的无人作战飞机的自主控制等级在5级左右,离完全自主机群协同作战尚有很大差距。
由于无人自主控制系统是一个多学科交叉的系统工程,目前的技术还不成熟,离达到有人机一样的作战水平尚有很大差距,在未来20年内恐将难以实现,至少目前还无法判断其实现的可能性;而有人战斗机在执行高机动大过载、长航时和高危环境等任务时,又表现出明显的不足;未来的第五代战斗机在作战使命和能力需求上,需要具备这些能力。鉴于这一情况,本文提出第五代战斗机应兼顾有人驾驶和无人自主控制的两种平台,在执行机群协同作战、复杂作战环境和高度自主决策等任务时,需要飞行员配合执行;在不适宜飞行员驾驶的环境(如长时间作战、生化威胁环境、核辐射环境等)下,又只有五代机才能完成的任务时,就可以让战斗机在无人状态下执行任务。由五代机的飞行管理系统功能是有地面的工作人员根据事先编好的程序载入机载系统的,对于瞬息万变的战场,事先的假定都是有限的,有很多意外情况是我们无法预测的。虽然控制系统有一定的自学能力,但是与人脑相比相差甚远。因此,为了保证飞机的安全性和可靠性,五代机具有这两种控制模式下的一个控制原则是,尽量让战斗员去完成作战任务,只有在超出战斗员的生理极限或心里承受能力的情况下,才可以让飞机在无人状态下“自主”完成任务。
3 结语
本文从未来几十年内的作战环境、武器装备发展体系需求和作战使命等方面出发,提出第五代战斗机的能力需求。并根据现有无人机的自主控制水平、未来自主控制技术的发展速度以及有人战斗机的发展瓶颈等情况相结合,提出未来第五代战斗机的控制模式是有人控制与自主控制兼顾。
[1]John A.Tirpak.The Sixth Generation Fighter.AIRFORCEMagazine,2009,10:38-42.
[2]Adam J.Hobert.Issue Brief Fighter Generations.AIRFORCEMagazine,2008,9:32-32.
[3]Huang H M,Messina E,Wade R,et al.Autonomy measuresf or robot s[C]MProc.IMECE 2004.2004,11:13-19.
[4]卢广山,李峰,张红.武器火控系统技术综述[J].国防科技工业,2002,3:1-5.
[5]Office of the Secretary of Defense.Unmanned aircraft systems roadmap 2005-2030 [M].Washington DC,2005.
[6]Boskovic J D,Prasanth R,Mehra R K.Multilayer Architecture for Intelligent Control of Unmanned Aerial Vehicles[C],AIAA 2002-3473:1-11.
[7]陈宗基,魏金钟,王英勋等.无人机自主控制等级及其系统结构研究 [J].航空学报,2011,6(32),1075-1083.
[8]Antsaklis PJ,Passino K M.An introduction t o intelligent and autonomous control[M].Netherlands:Kluwer Academic Publishers,1993.
[9]Mission planning systems for tactical aircraft(Pre-f light and in flight)[R].AGA RD-AR-313,1992.
[10]Chandler P R,Pachter M.Research issues in autonomous control of tactical UAVs[C].Proc.American Control Conf,1998:394-398.
[11]Clough B T.Unmanned aerial vehicles-autonomous control challenges,a researcher's perspective[C].AIAA,2003-6504:1-15
[12]Cummings M L.Designing decision support systems f or revolutionary com man d and control domains[D].Doctoral Dissertation,University of Virginia,2004.
[13]Valavanis K P.Advances in Unmanned Aerial Vehicles,State of the Art and the Road to Autonomy[M].Springer,2007.
[14]Pachter M,Chandler P R.Challenges of autonomous control[J].IEEE Control Systems Magazine,1998,18(4):92-97.
[15]高劲松,余菲、季晓光.无人机自主控制等级的研究现状[J].电光与控制,2009,10(16):51-54.
猜你喜欢
小哥白尼(军事科学)(2021年7期)2021-11-20 06:14:48
军事文摘(2021年19期)2021-10-10 13:28:40
军事文摘(2021年17期)2021-09-24 01:05:58
意林·全彩Color(2019年4期)2019-05-11 09:07:26
儿童故事画报·发现号趣味百科(2017年4期)2017-06-30 08:09:31
百科探秘·航空航天(2016年12期)2017-01-15 13:32:51
百科探秘·航空航天(2016年5期)2016-11-07 07:06:51
高中生学习·高二版(2015年12期)2016-01-05 13:08:35
中学英语之友·上(2008年2期)2008-04-01 01:19:30
中学英语之友·上(2008年2期)2008-04-01 01:19:30
