基于二阶滑模观测器的永磁同步电机无位置传感器控制
2013-10-10 02:26:54张晓光陈小龙安群涛
电力自动化设备 2013年8期
张晓光,孙 力,陈小龙,安群涛
(哈尔滨工业大学 电气工程及自动化学院,黑龙江 哈尔滨 150001)
0 引言
永磁同步电机PMSM(Permanent Magnet Synchronous Motor)的转子位置与速度是进行矢量解耦控制的必要条件,通常采用位置传感器进行检测,其中光电编码器、磁编码器以及旋转变压器等最常见。采用传感器可以准确、方便地获得转子位置与速度信息,是电机控制系统设计的首选方案。但在航空航天等一些特殊应用场合,位置传感器的应用将受到一定的限制,主要问题有:在恶劣环境下,由于温度、湿度以及机械振动等影响,使得传感器受到干扰,导致其精度降低,性能不稳定甚至无法工作;高精度、高响应的传感器价格昂贵,对于低成本控制系统而言,增加系统成本;传感器的应用增加了电机轴向尺寸和体积,在空间受限系统中无法使用。
为了解决位置传感器在一些特殊场合应用受限问题,国内外学者做了大量研究,一些无位置传感器控制方法已经被广泛研究,包括高频注入法、扩展卡尔曼滤波器、滑模观测器、全阶/降阶观测器、磁链估计法等[1-6]。其中滑模观测器具有鲁棒性强、动态响应快、易于工程实现等诸多优点而得到了广泛关注[7-10]。然而滑模观测器中抖振现象的存在会直接影响观测精度,为了解决抖振问题,文献[11]在滑模边界层内采用连续函数取代符号函数,从而抑制了抖振现象,但在滑模边界层内观测器的鲁棒性将无法得到保证。文献[12]和[13]分别设计了具有变截止频率的低通滤波器和具有扩展卡尔曼滤波器结构的滤波器对观测的电机反电动势进行滤波,但在抑制抖振的同时,被观测量也将产生相位滞后与幅值的减小,因此需要对估计的转子角度进行相位和幅值补偿。
本文在分析传统滑模观测器的基础上,提出一种基于线性滑模与混合非奇异终端滑模的新型二阶滑模观测器,并对滑模控制律进行了设计,抑制了滑模固有的抖振现象。该观测器能够避免常规滑模观测器由于低通滤波所产生的相位滞后,提高了转子位置与速度的估算精度。利用Lyapunov方法证明了观测器的稳定性,并给出了滑模控制律参数的自适应律。最后通过仿真和实验结果验证了该观测器的正确性和有效性。
1 永磁同步电机数学模型
对于表贴式永磁同步电机,假设转子永磁磁场在气隙空间分布为正弦波,定子电枢绕组中的感应电动势也为正弦波,不计铁芯涡流与磁滞损耗,其在静止参考坐标系下的电压方程如下:
其中,R 为定子电阻;L 为定子电感;eα、eβ,iα、iβ,uα、uβ分别为αβ坐标系下的绕组反电势、定子电流和定子电压。
由式(1)可得表贴式永磁同步电机在静止αβ坐标系下状态方程为:

2 二阶滑模观测器
2.1 常规滑模观测器
由于电机转子位置与速度信息包含在电机反电动势中,因此可构建滑模观测器对反电动势进行观测,进而估计电机转子位置与速度。根据式(2)所示永磁同步电机的状态方程,构建常规滑模观测器如下:

其中,“^”表示观测值;K= [-k1-k1]T为滑模增益矩阵,k1>0;sgn(·)为符号函数。
将式(3)与式(2)相减得到观测误差方程:


当系统状态达到滑模切换面以后,由等效控制理论可知滑模切换面满足,则观测误差方程可简化为:

由式(6)可知,电机的反电势信息被包含在符号函数中,但符号函数为不连续变化量,含有大量高频干扰,因此需要对其进行低通滤波才能得到平滑的反电势信号,经过滤波处理后的估算反电势为:

其中,ωc为低通滤波器的截止频率。通过低通滤波的反电动势将会产生相位延迟,该延迟与低通滤波器的截止频率直接相关,截止频率越低,对应固定频率的相延迟越大,实际应用中需对其进行相位补偿。补偿后的转子位置与速度估计值为:
2.2 二阶滑模观测器的构建与稳定性分析
对常规滑模观测器的分析可知,为了得到平滑的反电势信息,采用了低通滤波器对符号函数中抖振信号进行滤波处理,从而导致了估算转子位置的相位延迟,需要进行相位补偿。同时由式(9)可知,估算速度由转子位置微分计算得到,将会引入大量干扰,从而影响观测精度。为了解决常规观测器的上述问题,本文提出二阶混合非奇异终端滑模观测器,该观测器在本质上抑制了滑模固有的抖振现象,省去了低通滤波器,从而避免了观测转子位置的相位滞后,提高了观测精度。
构建新型滑模观测器如下:

其中,v=[vαvβ]T为观测器控制律。
将式(10)与式(2)相减得到新型观测器的观测误差方程:

由滑模控制理论可知,滑模切换面的设计将直接影响系统状态的收敛特性[14-15]。而对于滑模观测器而言,滑模切换面是观测器设计的关键,它将决定观测值收敛到实际值的速度与方式。因此本文基于线性滑模与混合非奇异终端滑模设计了如式(12)所示的滑模切换面。

其中,c、γ、p、q 为滑模参数,且 c>0,γ>0,p/q>1,p、q均为奇数;为定子电流观测误差,将其作为一阶线性滑模切换面;s为二阶混合非奇异终端滑模切换面。
滑模切换面确定之后,需要进一步对新型观测器(式(10))中的滑模控制律v进行设计,以保证该观测器的稳定。本文设计滑模观测器控制律v为:

其中,η、u、lg均为滑模控制律参数,且η>0,u>0。
结合误差方程式(11),可得:

进一步根据滑模控制律式(13),可得:

当滑模控制律参数lg取值满足:

则式(16)可进一步简化为:

显然在参数lg的选取范围内所设计的滑模控制律满足滑模到达条件,能够保证该滑模观测器的稳定。而根据滑模控制律参数lg的选取范围可设计参数自适应律如式(19)所示,其中 g>1。

2.3 转子位置与速度信息获取
根据滑模控制理论可知,在控制律式(13)作用下,二阶滑模切换面s将会在有限时间内收敛于平衡点,此时滑模切换面方程式(12)为:


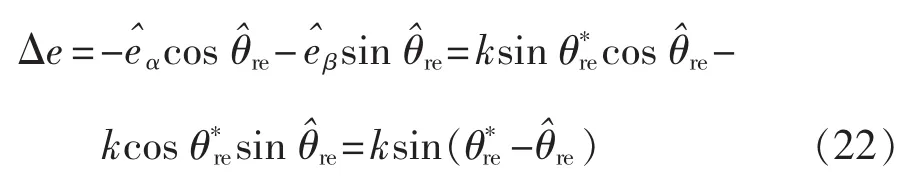
式(21)表明电机的反电动势信息可通过滑模控制律进行观测。同时与式(6)进行对比可知,常规滑模观测器的反电动势信息包含在引起抖振现象的符号函数中,而新型滑模观测器的反电动势信息包含在滑模控制律式(13)中,虽然滑模控制律中同样包含符号函数,但该符号函数经过了积分器的滤波环节,使得抖振现象得到有效抑制,因此,转子位置可以直接由观测的反电动势信息计算得到,不需要再进行低通滤波处理,避免了常规滑模观测器的相位滞后问题。
常规滑模观测器计算转子位置与转速的方法通常采用如式(8)和(9)所示的反正切与微分计算方法,这种方法精度不高且微分运算容易引入干扰。为了克服上述缺点提高观测精度,本文采用如图1所示的转子位置与速度跟踪算法从观测的反电动势中解调出转子位置和速度。图中,分别为估算转子位置与速度。
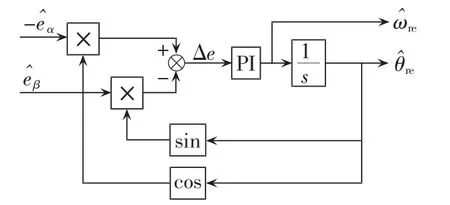
图1 转子位置与速度跟踪算法Fig.1 Rotor position and speed tracking algorithm
对图1算法进行分析可知:
其中,θ*re为观测反电势的相位角,k为反电势系数。

此时图1所示的跟踪算法结构等效于图2所示的锁相环结构。转子位置误差Δθre经过PI调节后得到估算转速,而估算转速经过积分环节得到估算转子位置。某一时刻,若估算转子位置小于实际转子位置,则位置误差增大,经PI调节输出后的估算转速增大,进而调节估算转子位置逐渐增大,最终使其与实际转子位置相接近;若估算转子位置大于实际转子位置,分析类似。
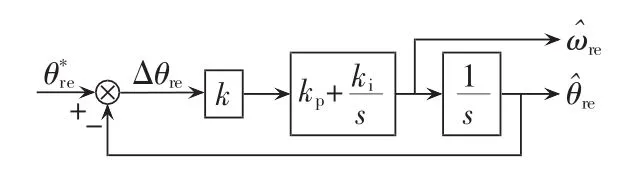
图2 锁相环结构框图Fig.2 Structure of PLL
图3为二阶混合非奇异终端滑模观测器结构框图。由式(10)所构建的滑模观测器估算出电机电流,并与检测的实际电流相减得到电流误差,利用该电流误差构建滑模面,从而通过滑模控制律估计出电机反电动势,最后利用跟踪算法得到转子位置与速度信息。
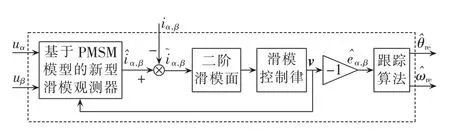
图3 新型滑模观测器系统框图Fig.3 Block diagram of novel sliding mode observer system
3 仿真与实验验证
建立了基于Simulink的系统仿真模型,并以TI公司TMS320F2812为控制芯片搭建了实物系统,控制系统整体结构如图4所示,电机参数为R=3.5 Ω;Ld=Lq=11.5 mH;ψa=0.107 Wb;J=4.4×10-4kg·m2;粘滞摩擦系数 B=0.000 1 N·m·s;极对数 p1=3;额定转速为2 000 r/min;逆变器开关频率为15 kHz。
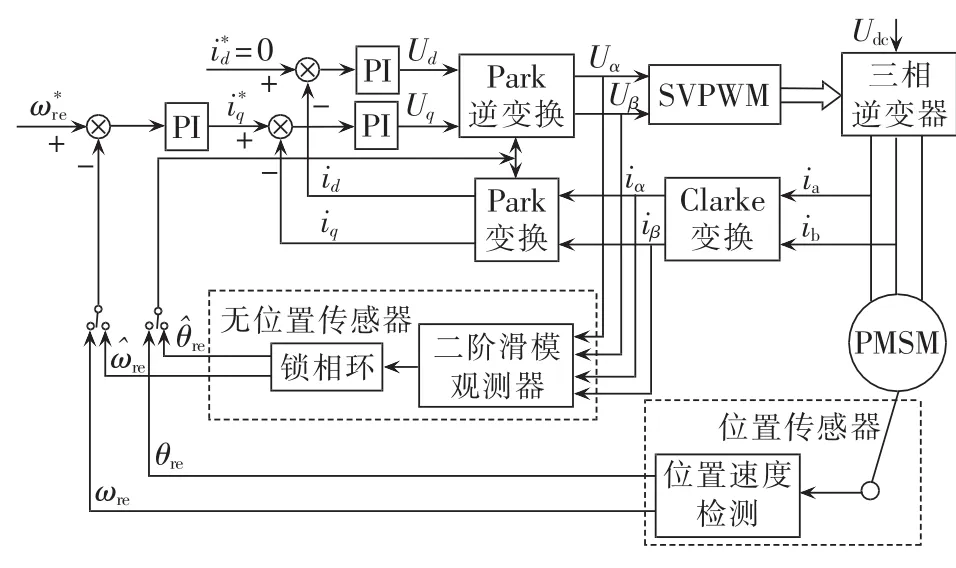
图4 控制系统框图Fig.4 Block diagram of control system
图5—7为常规滑模观测器及新型滑模观测器仿真结果对比,图中虚线为实际值,实线代表观测器估计值。其中图5为α轴电流估计仿真,图6为转子位置估计仿真,图7为电机转速估计仿真。图8为电机给定转速从200 r/min增加至500 r/min时2种滑模观测器电机转速估计值与实际测量值对比实验结果,其中电机实际速度是由2500线的光电编码器经过 DSP 4 倍频后测量得到;图 9(a)、(b)分别为电机给定转速500 r/min稳态运行过程中,2种滑模观测器转子位置估计值与实际转子位置对比曲线,而实际转子位置同样由编码器测量得到。
从以上仿真与实验可得结论如下。
a.常规滑模观测器电流估计值存在高频抖振,估计精度不高;而新型滑模观测器有效抑制了滑模固有的抖振现象,估计电流能够快速收敛于实际电流,且估计精度高。
b.常规滑模观测器估计的转子位置滞后于实际转子位置,存在一定误差;而新型滑模观测器避免了低通滤波器的引入,能够快速跟踪实际转子位置,稳态误差小。
c.常规滑模观测器转速估计波动较大,精度低;而新型观测器由于引入二阶滑模与锁相环跟踪算法提高了观测精度,估计转速波动小,稳态性能较好。
另外,与常规观测器相比,新型观测器速度估计的动态性能改善不显著,而通过对锁相环中PI参数进行调节,可实现速度估计的动态性能调节,增大比例系数可提高动态性能,但比例系数过大会导致估计速度出现振荡,影响稳态性能。因此本文为了提高速度估计的稳态性能同时不影响其动态性能,选取 PI参数为 kp=20、ki=1。
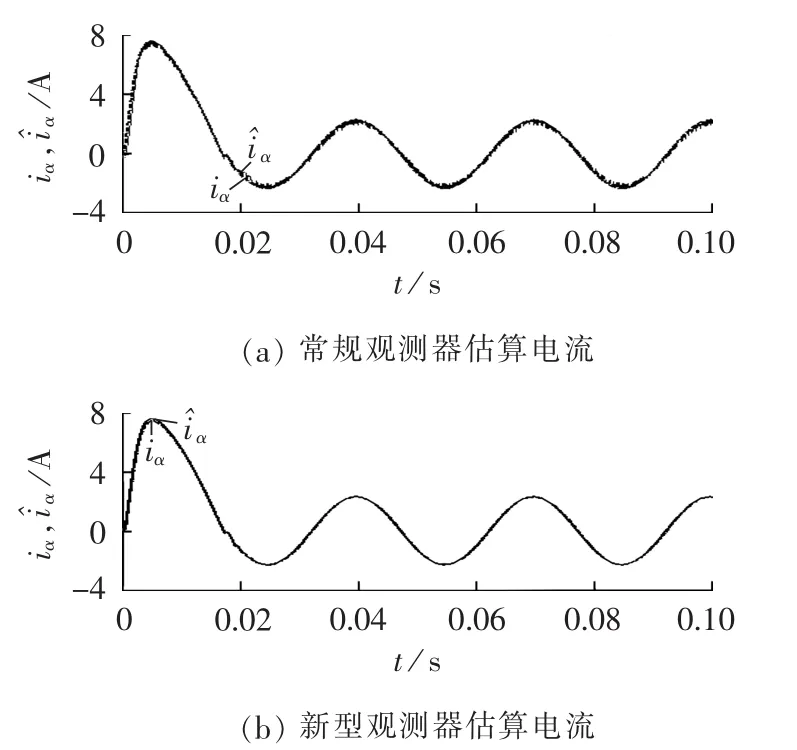
图5 常规观测器与新型观测器电流估计值仿真对比Fig.5 Simulative comparison of estimated current between traditional and novel observers
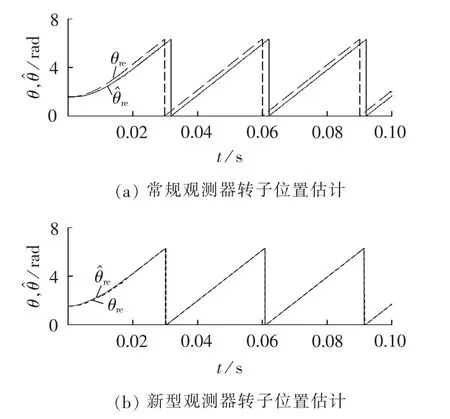
图6 常规观测器与新型观测器估计的转子位置仿真对比Fig.6 Simulative comparison of rotor position between traditional and novel observers

图7 常规观测器与新型观测器电机速度估计仿真对比Fig.7 Simulative comparison of motor speed between traditional and novel observers
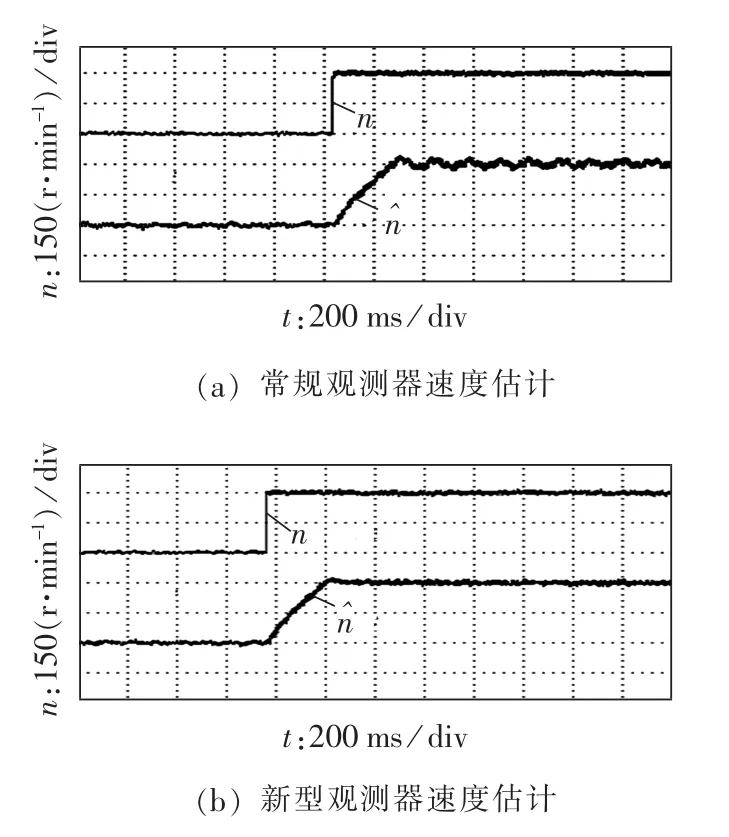
图8 常规观测器与新型观测器电机速度估计实验波形Fig.8 Experimental waveforms of motor speed estimated by traditional and novel observers
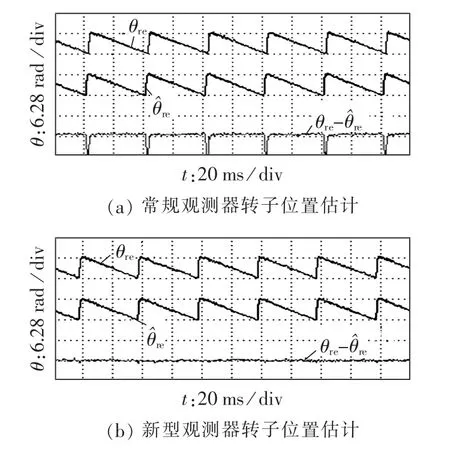
图9 常规观测器与新型观测器转子位置估计实验波形Fig.9 Experimental waveforms of rotor position estimated by traditional and novel observers
4 结论
本文在传统滑模观测器基础上,提出了一种二阶滑模观测器。该观测器通过在线性滑模面基础上引入混合非奇异终端滑模面,并设计合适的滑模控制律,可以有效抑制常规滑模观测器中的抖振现象,提高电机转子位置与速度的观测精度,并消除了低通滤波器所带来的幅值与相位影响。仿真与实验结果表明,所设计的二阶滑模观测器能有效提高观测精度,为永磁同步电机调速系统的无位置传感器运行提供了一种有效的方法。
猜你喜欢
应用数学(2020年2期)2020-06-24 06:02:46
郑州大学学报(工学版)(2020年2期)2020-06-16 12:43:14
汽车电器(2019年2期)2019-03-22 03:35:16
数学物理学报(2018年6期)2019-01-28 08:58:02
中央民族大学学报(自然科学版)(2018年3期)2018-11-09 01:16:34
Acta Mathematica Scientia(English Series)(2018年6期)2018-03-01 03:13:44
铁道科学与工程学报(2015年5期)2015-12-24 12:12:08
深空探测学报(2015年3期)2015-12-07 11:15:06
电测与仪表(2015年19期)2015-04-09 11:32:56
电测与仪表(2014年11期)2014-04-04 09:21:36