
基于Matlab\Simulink对半主动悬架的Fuzzy-PID控制仿真研究
2013-10-09 03:28:00郝莉红王志腾
河北工业科技 2013年1期
郝莉红,王志腾,陈 洪
(1.河北工程大学机电学院,河北邯郸 056038;2.东风汽车车轮有限公司,湖北十堰 442000)
目前,国内外科技人员对汽车主动、半主动悬架控制方式的研究,由基于精确数学模型的传统控制方法,转到基于不确定模型的非线性控制[1]。汽车控制技术也从古典控制技术向现代、智能控制技术发展。智能控制方法中模糊控制和PID控制是较适用的。本文将两者控制方法协同使用,模糊PID控制器中,模糊逻辑控制方法不依靠系统的数学模型,可以处理参数的非线性和不确定性问题,具有灵活性和适应性的特点,模糊与PID协同控制,将使半主动悬架更好地发挥作用[2]。
1 建立2自由度1/4半主动悬架数学模型
车辆是一个极其复杂的振动系统,其振动属于无限自由度的连续体的振动。它的主要振源来自路面,其次来自发动机和传动系[3]。本文选择2自由度1/4单轮汽车振动模型作为研究对象,图1为2自由度1/4半主动悬架汽车力学模型。
根据Lagrange方程得到图1所建立的系统的运动微分方程为


图1 2自由度1/4半主动悬架汽车力学模型Fig.1 Two-degree of freedom 1/4semi active suspension mathematical model

则系统状态方程为

以车身质量垂直方向的加速度、车身质量垂直方向的速度、车身质量与车轮质量之间的相对位移z2-z1作为输出变量,

则输出方程为

式(3)、式(4)中:U=(z0u)T;


2 路面的输入
本文仿真所用的随机路况是由白噪声积分方法所产生的,以车速为定值不变作为前提,汽车的速度时域功率谱就是一种白噪声信号,谱密度为常数4π2Gq(n0)n2v,于是,路面轮廓可由谱密度的白噪声通过积分器产生[4],即

式中:k0=2πn0(Gq(n0)v)-2;ω(t)为单位白噪声;n0为参考空间频率,n0=0.1m-1;Gq(n0)为路面不平度系数。
当路面为C级时,路面不平度系数Gq(n0)=256×10-6m3,车速为25m/s时,利用 Matlab\Simulink构造出积分白噪声模型,仿真得出随机信号波形,如图2和图3所示。

图2 路面激励仿真模型Fig.2 Pavement incentive simulation model
3 Fuzzy-PID控制系统的设计
3.1 Fuzzy-PID控制器的结构
模糊控制器的设计是Fuzzy-PID控制系统的核心内容,本文采用二维模糊控制器,以车身垂直速度误差信号e和车身垂直加速度信号ec作为模糊控制器的输入,以kP,kI,kD为模糊控制器的输出量,输入、输出变量都选择7个模糊集子集{NB,NM,NS,ZO,PS,PM,PB}。

图3 路面信号Fig.3 Pavement signal
3.2 确定控制器的参数选择
两输入e和ec的基本论域分别为[-0.8,0.8]和[-8.3,8.3],相应的模糊论域为{-3,-2,-1,0,1,2,3};输出的基本论域是[-900,900],相应的模糊论域为{-6,-4,-2,0,2,4,6},量化因子ke为0.36,kec为3.75,比例因子取150。
模糊控制器的隶属函数选取较常用的三角形函数trimf,输出量的解模糊化采用面积平分法bisrctor。
3.3 确定模糊规则(见表1)
根据各模糊子集的隶属度和各参数模糊模型,运用模糊控制规则表,查出修正参数代入式(6)中计算[2]:

式中:KP,KI,KD为整定后的比例、积分及微分因子;K′P,K′I,K′D为 PID 的参数的初始值;{ei,eci}为e和ec对应的模糊控制规则;ΔKP,ΔKI,ΔKD为修正系数。
4 仿真结果与仿真分析
依据式(1)所建立的2自由度1/4半主动悬架动力学模型,用Matlab\Simulink建立仿真模型,仿真中所采用的参数见表2。
半主动悬架模糊PID控制模型见图4。
4.1 仿真分析结果
图5~图7为仿真分析图,由图可知半主动悬架使用Fuzzy-PID控制方法比单独使用模糊控制或PID控制方法有良好的鲁棒性,可以有效地提高悬架的车辆行驶平顺性和操作稳定性。

表1 KP,KI,KD 模糊控制规则Tab.1 Fuzzy control rule of KP,KI,KD

表2 模型仿真参数表Tab.2 Model simulation parameters
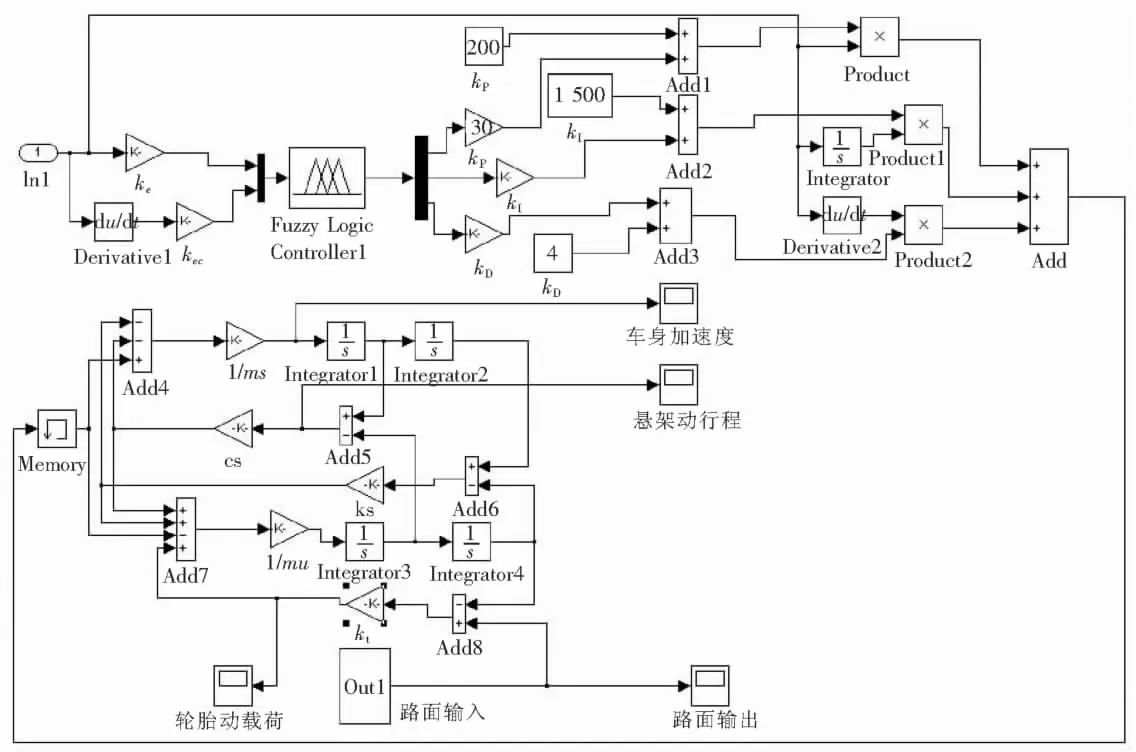
图4 半主动悬架模糊PID控制模型Fig.4 Fuzzy PID control model of semi active suspension

图5 悬架动行程Fig.5 Suspension dynamic stroke
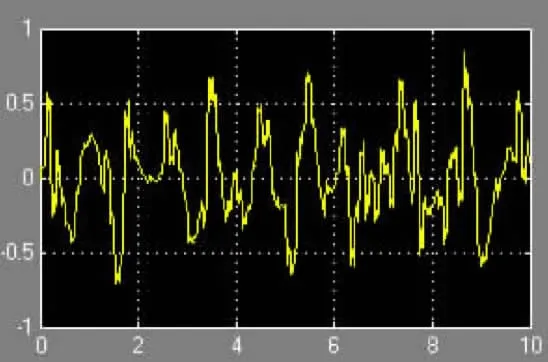
图6 车身加速度Fig.6 Body acceleration

图7 轮胎动载荷Fig.7 Tyre dynamic load
5 结 论
在白噪声路面激励条件下,模糊PID控制可以有效地提高悬架的车辆行驶平顺性和操作稳定性,验证了模糊PID控制具有较好的自适应能力。但对PID参数的整定和模糊控制规则的制定需要较丰富的实践经验,为克服这一缺点,应采用遗传算法或粒子群算法等优化方法加以改善,这为下一步研究提供了一个新思路。
/References:
[1]张大千,张天侠.车辆半主动悬架的模糊控制与仿真[J].机械设计,2008,25(9):21-24.ZHANG Daqian,ZHANG Tianxia.Fuzzy control and simulation on semi-active suspension frame of vehicles[J].Journal of Machine Design,2008,25(9):21-24.
[2]刘 潜,王天利.汽车半主动悬架的模糊PID控制仿真研究[J].农业装备与车辆工程,2011(7):21-24.LIU Qian,Wang Tianli.Study on fuzzy PID control simulation of semi-active suspension[J].Agricultural Equipment &Vehicle Engineering,2011(7):21-24.
[3]张慧刚,杨 建.车辆半主动悬架动力学分析及模糊PID控制仿真[J].拖拉机与农用运输车,2011,38(1):14-19.ZHANG Huigang,YANG Jian.Dynamic analysis and fuzzy-PID control simulation of semi-active vehicle suspension[J].Tractor &Farm Transporter,2011,38(1):14-19.
[4]韩豫萍.智能控制在汽车半主动悬架中的应用[D].山东:山东轻工业学院,2009.HAN Yuping.Intelligent Control Application in Automotive Semi-active Suspension[D].Shandong:Shandong Polytechnic University,2009.
[5]曾洁如,谷正气,李伟平,等.基于遗传算法的半主动悬架模糊PID控制研究[J].汽车工程,2010,32(5):429-433.ZENG Jieru,GU Zhengqi,LI Weiping,et al.A research on the fuzzy PID control for vehicle semi-active suspension based on genetic algorithm [J].Automotive Engineering,2010,32(5):429-433.
[6]杨启耀,周孔亢,张文娜,等.半主动空气悬架Fuzzy-PID控制[J].农业机械学报,2008,39(9):24-29.YANG Qiyao,ZHOU Kongkang,ZHANG Wenna,et al.Fuzzy-PID control on semi active air suspension[J].Transactions of the Chinese Society for Agricultural Machinery,2008,39(9):24-29.
[7]张 谦.1/2汽车半主动悬架模糊PID控制器设计与仿真[J].公路与汽运,2008(3):25-27.ZHANG Qian.1/2automotive semi-active suspension fuzzy PID controller design and simulation[J].Highways &Automotive Applications,2008(3):25-27.
[8]樊登柱,吴 炜,姚嘉伶,等.汽车磁流变半主动悬架的模糊控制[J].南通职业大学学报,2008,22(4):96-99.FAN Dengzhu,WU Wei,YAO Jialing,et al.Fuzzy control for automotive semi-active suspension with MR damper[J].Journal of Nantong Vocational College,2008,22(4):96-99.
[9]何青玮,林 青.MATLAB在汽车半主动悬架仿真中的应用[J].机床与液压,2002(3):34-36.HE Qingwei,LIN Qing.The application of MATLAB in the simulation of vehicle semi-active suspension[J].Machine Tool&Hydraulics,2002(3):34-36.
猜你喜欢
装备制造技术(2020年11期)2021-01-26 00:38:58
北京汽车(2016年6期)2016-10-13 17:07:50
西南交通大学学报(2016年3期)2016-06-15 20:29:35
电子制作(2016年21期)2016-05-17 03:53:01
通信电源技术(2016年5期)2016-03-22 01:09:57
现代制造技术与装备(2015年4期)2015-12-23 10:20:18
中国石油大学学报(自然科学版)(2015年2期)2015-11-10 06:08:17
电源技术(2015年11期)2015-08-22 08:50:38
振动、测试与诊断(2014年6期)2014-03-01 01:14:59
汽车维护与修理(2014年10期)2014-02-28 12:15:00
