电力推进科考船总体设计要点综述
2013-09-27 08:31吴刚
船舶与海洋工程 2013年3期
吴 刚
(708研究所,上海 200011)
0 引 言
20世纪90年代以来,随着大功率交流电机变频调速技术日臻完善,Z型推进器、吊舱推进器和电力推进元器件的设计制造技术日趋成熟,以及电力推进系统具有的布置灵活、操控自动可靠、噪声振动低、符合环保趋势并且容易满足各种大容量用电需求等优点,该系统在船舶上的应用得到了迅速发展。在国外新建的邮轮、渡轮、破冰船、挖泥船、半潜船、科考船以及集装箱船、油船、LNG船和滚装船等各类船型中均得到推广应用。国内由于电力推进系统的成套化和设计能力不足,几乎都是采用西门子、ABB等公司的成套产品,而且主要应用在某些特种用途船上,尤其是科考船上。
708研究所最近几年先后设计并成功交付了多型采用电力推进系统的船舶项目,如海监83、天然气水合物综合调查船(海洋六号)、12缆物探船(海洋石油720)以及最近刚交付使用的当前国内最先进的科考船—中科院“科学”号海洋综合考察船,此外,708所作为国内联合设计单位,正在积极参与并推进国家海洋局新建极地科学考察破冰船项目。这些科考船都采用电力推进系统,而且其电气单元和推进单元均有各自的技术风格和应用特点。
1 系统组成及特点
电力推进系统的主要组成部件有原动机、发电机、主配电板、推进变压器、变频器以及推进电机(亦称推进马达)、推进器,如采用吊舱推进器,则推进电机包含在推进器自身模块的水下舱体内。
1.1 电制
电力推进系统采用中高压电制有利于减少推进电机尺寸和线路损耗,如总功率较大,一般选择中压或高压系统,例如需要三维地震采集作业的12缆物探船,需要极地破冰作业的科考破冰船,采用6600V中压系统;为降低成本,如总功率不高,采用690V低压系统是较经济的方案。如海监83、海洋六号、“科学”号等船采用的均是690V低压系统。
1.2 推进电机
目前电力推进系统常用的推进电机有以下两种:
1) 交流同步电机:多为永磁同步电机;
2) 交流异步电机:多为鼠笼式感应电机。
电机种类影响传动形式继而影响传递效率:同步电机适用于低速传动,调速范围一般在0~350r/min,可与螺旋桨直接相连;而鼠笼式感应电动机则用于中高速传动,一般在 750~1200r/min,它与螺旋桨之间通常需经减速装置连接,存在传递效率损失。
海监83和“科学”号均采用吊舱推进,推进电机为ABB永磁同步电机,推进电机与螺旋桨之间几乎不存在传递损失;而“海洋六号”采用异步电机,与Z型推进器之间通过螺旋锥减速齿轮传递,有约5%的传递损失;“海洋石油720”采用鼠笼式异步电机,通过减速齿轮箱联合驱动一对可调式导管桨,同样存在约3%的传递损失。
1.3 推进器
在电力推进系统中,有轴桨推进、 Z型、L型传动式推进、吊舱式推进等多种形式(见图1)。目前吊舱式推进器因其噪声振动水平低等优点已得到推广使用,尤其是对噪声振动要求较高的科考船。
推进器是电力推进系统中重要的组成部件。为在前期方案设计中更加准确地估算主要工况负荷和用电功率,有必要熟悉和掌握各种推进器的推进单元敞水效率、空泡性能以及推进器与船体之间的相互影响,尤其要注意有冰区加强后的影响。以上提到的“推进单元敞水效率”不单指螺旋桨叶轮的敞水效率,而是整个水下部分推进器的敞水效率 ηunitopenwater。在考虑推进单元敞水效率、船身效率Hη和相对旋转效率rη后为总的推进效率dη:
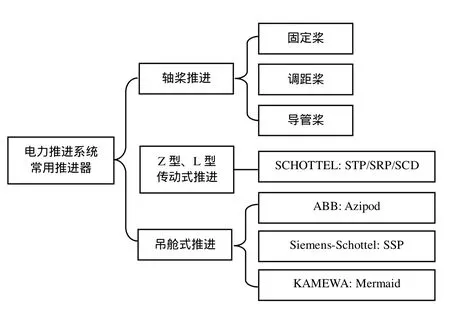
图1 电力推进系统常用推进形式

“海洋六号”尾部安装两台肖特尔STP 1515的Z型推进器(CCS B3级冰区加强)(见图2(a)),整个推进模块总的推进效率dη预估为0.625[1];“海监83”在国内首次成功采用了Compact Azipod吊舱推进器(CCS B级冰区加强)(见图2(b)),整个吊舱装置总的推进效率约为0.64[2],以上总的推进效率考虑了推力减额、伴流分数和相对旋转的影响。
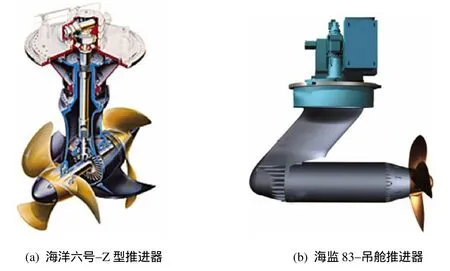
图2 Z型和吊舱推进器
2 总体设计要点
电力推进系统在快速发展的同时,已不仅仅局限于船舶电气装置这一单一范畴。与非电力推进船舶设计相比,电力推进系统设计在面临大量新任务、新问题的同时,总体、轮机等专业的主动跟进和紧密配合已变得必不可少。
2.1 电站配置
采用电力推进系统的船舶,其电站配置是首先需要论证的技术难点,在方案论证时需综合考虑:最大用电工况的总功率需求、各用电工况下的负荷平衡、航速特殊要求以及发电机备用、选型和油耗、电站初投资和未来功能扩展等诸多方面。
采用电力推进的科考船,除对航速或航渡时间有较高要求的船型外,一般决定电站总功率的最大用电工况为科考作业工况。尤其是新设计的科考船,均要求有动力定位能力,加大了科考作业工况的最大用电需求。除海监83外,其他几条科考船最大用电工况或为ROV(缆控机器人)水下作业工况,或为地质取样工况,或为三维地质作业工况。
电站总功率一旦确定,大小发电机的组成也是需要综合论证的主要方面。例如,同样的电站总功率,三大一小发电机组与两大两小发电机组对于不同工况的负荷匹配和经济油耗等是需要综合论证的。
2.2 效率流程计算
虽然目前的电器元件功耗在逐步降低,但电力推进系统在将原动机的机械能转换成推进电机机械能的二次转换过程中能量损失总是无法避免的。图3是从原动机直至推进电机之间的效率流程图。
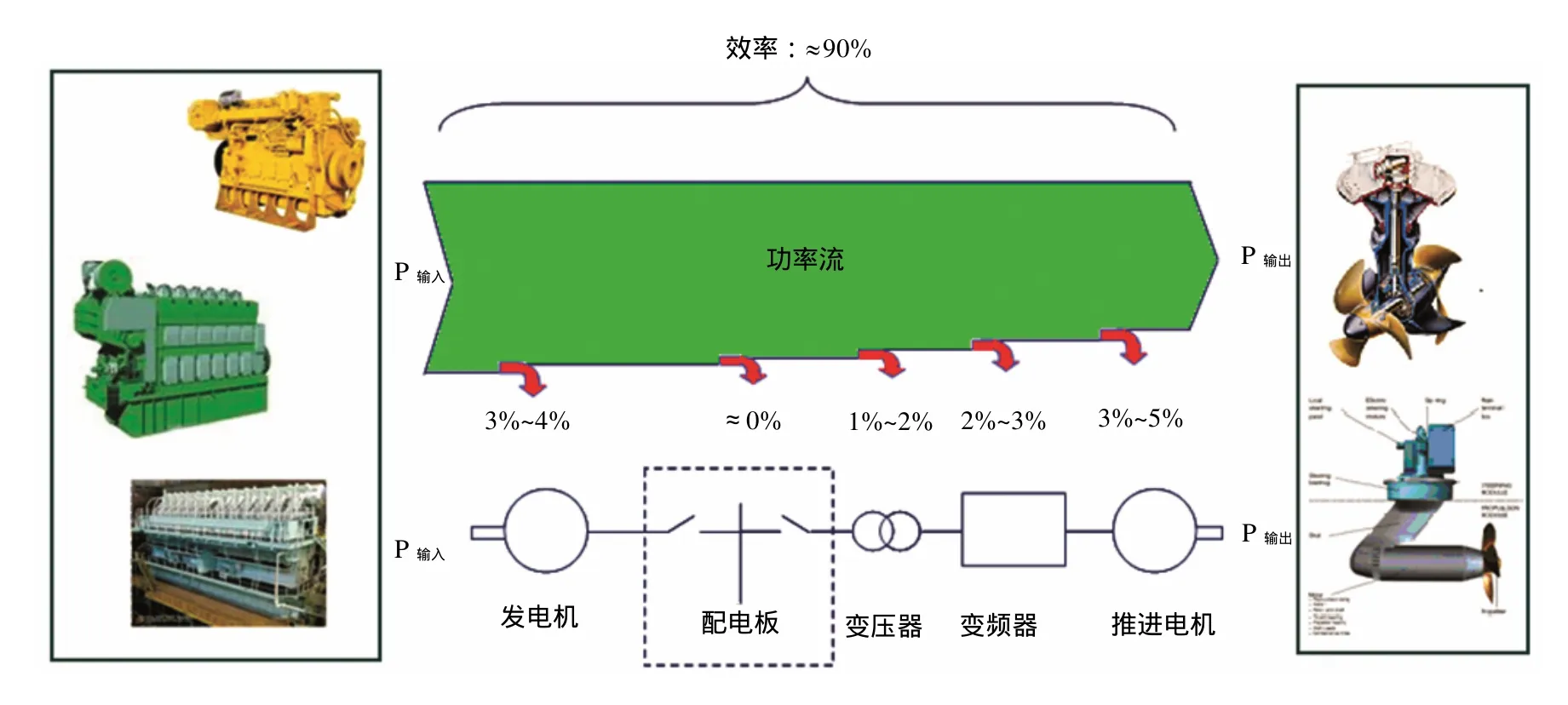
图3 从原动机直至推进电机之间的传递效率
从流程图中可以了解,电力推进系统从发电机组输出到推进电机输出之间的电力系统传递效率为:

在电力平衡计算中,“电站通过配电板分配给推进器的输出功率”与航速预估时得到的“推进器所需输入功率”两者之间存在传递过程中电力模块的功率损失,需区别对待。图4是某科考船采用吊舱推进的船舶电站分配功率的位置示意图。
2.3 螺旋桨设计点和电机扭矩特性
25届ITTC吊舱推进专家委员会针对吊舱推进的水动力试验和预报规程明确提出将螺旋桨与水下舱体作为一个推进器单元处理的建议。相关方法和应用介绍已在文献[3~5]中提及和介绍。在航速预估中应充分关注吊舱裸桨效率和吊舱单元效率的区别。图5是“海洋六号”科考船采用的Z型推进在德国波茨坦进行的水下推进单元试验照片[1]。
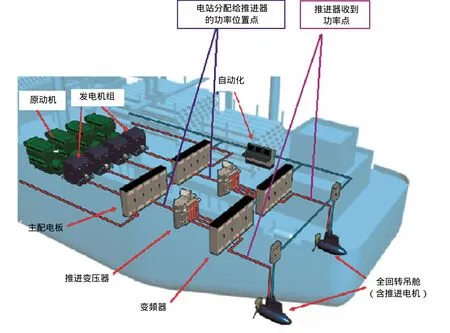
图4 船舶电站分解功率示意
相关规范[6]规定,电力推进船舶的推进系统应有足够的转矩余量,以便船舶能在恶劣天气下航行,或多螺旋桨船舶在转向情况下电机不致失步,并确保电机在任何环境下可靠起动。因此,在核算最大营运航速时推进电机的输出转矩应留有一定的风浪裕度,需注意,一般的推进电机在转速超过一定范围后均会出现扭矩下降的现象,此高转速区域属于电动机的弱磁区。螺旋桨的航速设计点需尽可能远离此区域。
2012年6月试航结束的“科学”号科考船最大航速和单机经济航速均达到预定指标,各项工况的电站负荷分布合理,电力推进设计获得圆满成功。这些成果与合理选择电站配置、准确把握螺旋桨设计点、充分考虑推进与电气单元效率、吊舱与船身相互影响等关键要点是密不可分的。表1为电力推进船海监83、海洋六号等4艘船的实船数据对比。
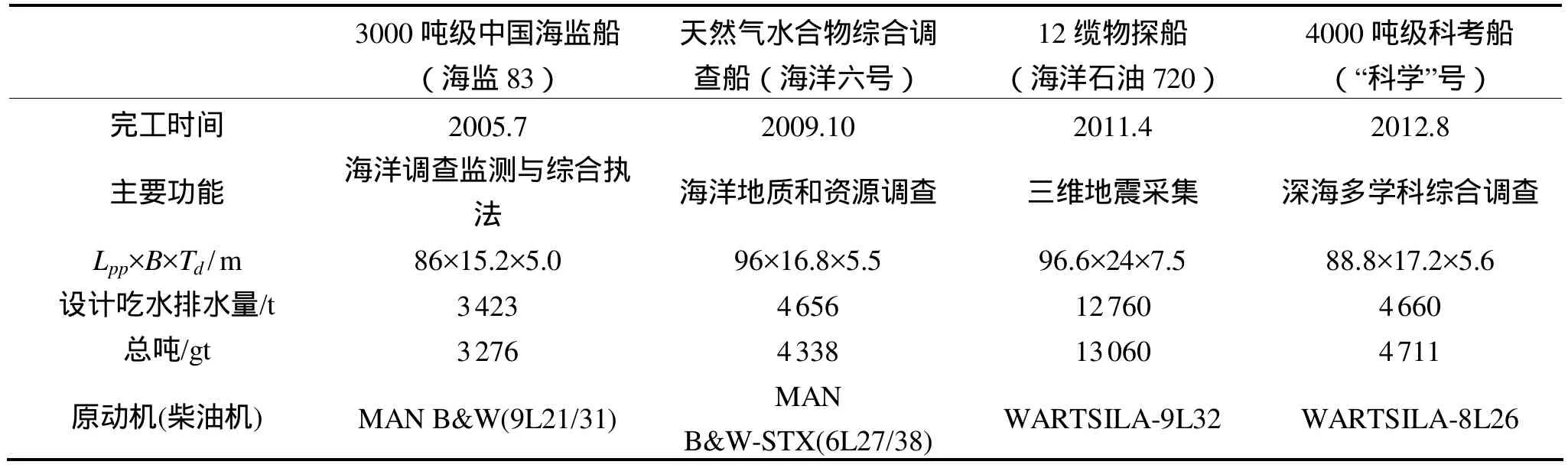
表1 电力推进船实船数据对比表
图5 肖特尔对Z型推进作敞水试验
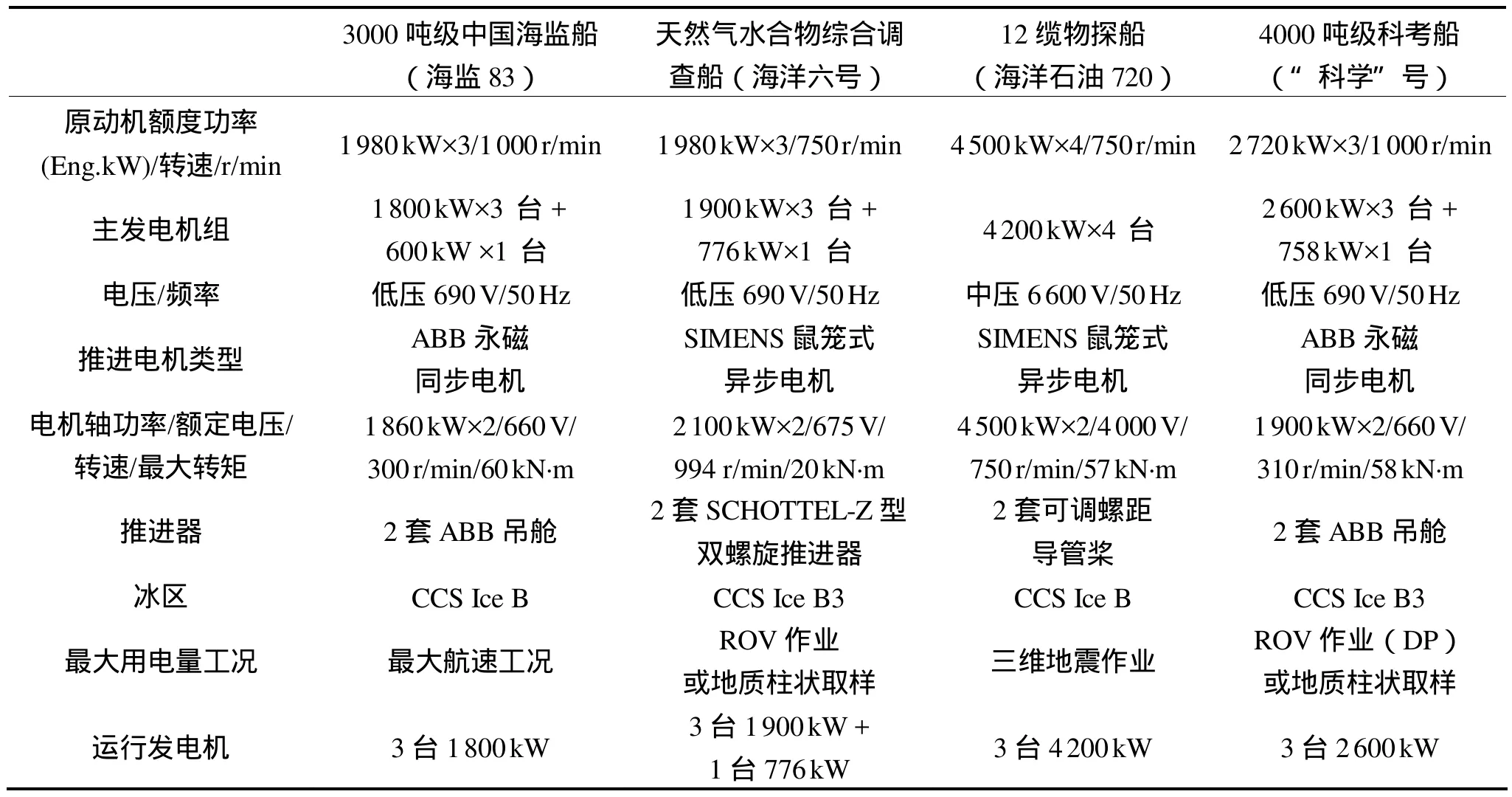
续 表 1
3 结 语
本文通过对几艘实船配置的电力推进系统的不同特点比较,结合作者船型设计的工作经历,阐述了使用电力推进系统的科考船的设计特点和需要注意的技术要点,为科考船在总体设计阶段选用电力推进系统提供参考。
[1] SCHOTTEL. NGHRV STP1515 Updated Propulsion Prediction[Z]. 2006.
[2] ABB. SOA RESEARCH VESSEL Power Prediction[Z]. 2003.
[3] 王文涛,缪泉明,应良镁. 吊舱推进船舶模型快速性试验技术[A]. 第九届全国水动力学学术会议暨第二十二届全国水动力学研讨会[C].
[4] 杨晨俊. 吊舱推进器模型试验及性能预报的ITTC推荐规程[R].
[5] The Specialist Committee on Azimuthing Podded Propulison. Final Report and Recommendations to the 25th ITTC[A].Proc.25th ITTC,Vol.2, Fukuoka, Japan, 2008.
[6] CCS钢制海船入级规范,电力推进船舶补充规定[S].
猜你喜欢
舰船科学技术(2022年21期)2022-12-12
科学大观园(2022年14期)2022-07-17
舰船科学技术(2021年12期)2021-03-29
船舶标准化工程师(2020年1期)2020-06-12
百科探秘·海底世界(2019年2期)2019-04-25
当代陕西(2018年12期)2018-08-04
航空模型(2016年10期)2017-05-09
舰船科学技术(2016年1期)2016-02-27
火控雷达技术(2015年2期)2015-04-14