
上反式光电周视探测装置目标全方位解算方法
2013-09-26 03:46张宝宜姚林海王小齐
电子设计工程 2013年23期
江 涛 , 张宝宜, 赵 江 , 姚林海, 王小齐
(1.西安应用光学研究所 陕 西 西 安 7 10065;2.92857部队 北 京 1 02444)
在海洋军事领域中,海上舰船目标是重要的军事目标,也是侦察和打击的主要对象[1]。传统的两轴正交光电探测装置结构,可以实现对水面目标的探测和大地方位解算。探测器和姿态传感器共同作为俯仰负载,可以实现瞄线在俯仰方向较大的动态范围,视频图像像旋较小[2-3]。但是,这种结构造成俯仰负载重量和惯量巨大,且需要更大功率的俯仰和方位电机驱动,不利于实现装置的小型化和微型化;同时针对水面目标的探测和方位解算,不需要瞄线在俯仰方向上较大补偿范围,造成方位和俯仰机构在功率和补偿范围上的浪费。
两轴上反式光电周视探测装置仅有反射镜作为俯仰负载,姿态传感器与方位机座固联,姿态量通过结构固定的几何传递关系向反射镜折算分量,方位和俯仰机构通过补偿折算分量来实现瞄线稳定和瞄线位置补偿,从而有利于实现装置的小型化和微型化,很好的解决了传统装置的不足。本文提出一种针对水面目标的两轴上反式光电周视探测装置目标方位解算方法,该方法以航向角、纵摇角、横摇角、方位转角、俯仰倾角以及一维视频偏差量,可实现实时解算目标大地方位角,并依据判据将目标方位指示扩展为全方位覆盖。
1 目标全方位解算原理分析
针对上反式光电探测装置姿态量几何传递关系和光路关系,将包含水面舰船目标的水平入射光平面模型化为通过反射镜中心且平行于水平面的假想平面;将通过目标红外特性形心的铅直入射光平面模型化为通过以探测装置为原点的大地坐标系铅直轴的的假想平面;将水平和铅直入射光平面镜反射后的出射光平面与焦平面交线的交点模型化为目标点,给出了目标大地方位角和装置航向角、纵摇角、横摇角、方位转角、俯仰转角以及目标视频水平或铅直偏差的解析关系。通过条件判断,克服了反正切函数主值范围仅覆盖(-90°,+90°)的缺点,使目标指示范围扩展至[-180°,180°],实现目标大地方位角指示的全方位覆盖。图1所示为两轴上反式光电探测装置水平和铅直入射光平面在大地坐标系中特征示意图。

图1 水平和铅直入射光平面特征示意图Fig.1 Level and lead into the light plane characteristic diagram
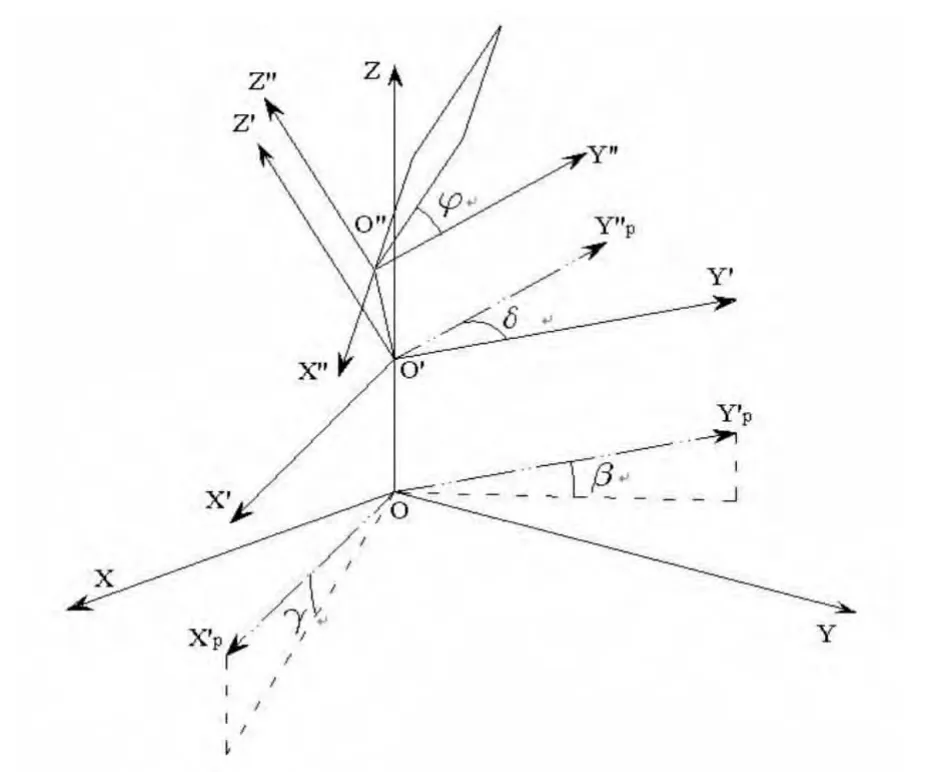
图2 上反式光电周视探测装置坐标系定义Fig.2 Up-trans photoelectric detection device coordinate system definition
图2所示为两轴上反式光电周视探测装置的坐标系定义:XOY 为大地坐标系,X′O′Y′为焦平面坐标系,X″O″Y″构成俯仰负载坐标系,Z″轴与Z′轴重合。
h为为探测装置航向角,p为探测装置纵摇角,r为探测装置横摇角,θ为方位负载转角,φ为俯仰反射镜倾角。
水平入射光平面定义为:在大地坐标系下,与XOY平面平行且通过方位轴和俯仰轴交点O″的平面。
铅直入射光平面定义为:在大地坐标系下,通过Z轴和目标红外特征形心,垂直于XOY平面的平面。水平和铅直入射光平面的交线即探测装置的瞄线,指向目标红外特征形心。
两轴上反式光电周视探测装置属于近水面光电装置,仅关注水面舰船目标。以探测装置为原点的大地坐标系下,平行于海面的水平入射光平面与垂直于海平面且通过目标红外特性形心的铅直入射光平面正交,二者经平面镜反射后,在探测器焦平面上成像均为直线。两个直线的交点即目标像点,视频跟踪器跟踪波门捕获该像点输出偏差量,可作为建立以航向角、纵摇角、横摇角、方位转角、俯仰倾角以及视频偏差量为变量的大地坐标系目标和焦平面像点间解析关系的前提[4-5]。
2 目标全方位解算方法设计
采集当前时刻装置的姿态位置量 (h,p,r,θ,φ), 其中,h为装置航向角,p为纵摇角,r为横摇角,θ为方位机构转角,φ为俯仰反射镜倾角。由(1)式计算中间变量t:

其中,D31=-sin(r)cos(p),D32=sin(p),D33=cos(r)cos(p)。
将φ和t代入(2)式计算中间变量e:

将上述计算结果代入(3)式计算海天平面经反射后出射光平面的法向量:

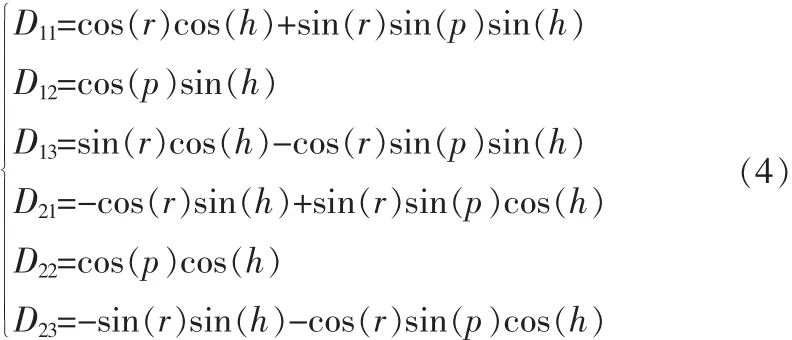
计算航向变化因子D11、D12、D13、D21、D22、D23的数值,

其中,U=(∂L-H)((D22-D12cot(ξ))+λtg(φ)cos (θ))+λH(tan(φ)cos(θ)+∂D32),G=(tan(φ)·sin(θ)+∂D31)((D32-D12cot(ξ)+λtan(φ)cos(θ))-((D21-D11cot(ξ))+λtan(φ)·sin(θ))(tan(φ)cos(θ)+∂D32),并令x′=σ。
计算目标方位角

利用(4)式所得计算中间变量W,M,

接着,从视频跟踪器中读取采集当前目标视频水平偏差量σ和铅直偏差量η。判读目标视频水平偏差量σ的噪声是否低于设定阈值,若为是,则计算水平和铅直入射平面在焦平面上像线交点的横坐标x′:
计算横坐标
其中,A=(∂L-H)D22+(∂L-H)tan(φ)sin(θ)W+Htan(φ)sin(θ)W+H∂D32W,B=H∂D32M+Htan(φ)sin(θ)M+(θL-H)tan(φ)sin(θ)M-(∂L-H)D12,a=σtan(φ)cos(q)D21+σtan(φ)sin(q)W+σ∂D32D21+σ∂tan(φ)sin(q)D32W-σtan(φ)sin(θ)D22-σ∂D31D22-σtan (φ)cos(θ)tan (φ)sin (θ)W-σ∂tan (φ)·cos(θ)D31W,b=-σtan(φ)cos(θ)D11+σtan(φ)cos(θ)tan(φ)sin (θ)M-η∂D32D11+σ∂D32tan(φ)sin(θ)M+σtan(φ)sin(θ)D12+∂D31D12-σtan(φ)cos(θ)tan(φ)sin(θ)M-σ∂tan(φ)cos(θ)D31M。
上式中L是系统的有效探测高度,即系统总高度H在铅直方向的投影,有如下关系:L=Hcos(r)cos(p)。
判断计算所得 ξ,若满足 ξ∈(0,π/2),则判断关系式 h+arctan(σ/f)+θ∈(-π,-1/2π),若为是,则目标大地方位角为 ξπ;若为否,则目标大地方位角为 ξ。若 ξ∉[0,π/2],则判断关系式 h+arctan(σ/f)+θ∈(π/2,π),若为是,则目标大地方位角为ξ+π,若为否,则目标大地方位角为ξ。向战斗单元发送计算所得目标方位角,其范围为[-180°,180°]。
若目标视频水平偏差量σ的噪声不低于设定阈值,则判读目标视频铅直偏差量η的噪声是否低于设定阈值,若为是,则通过计算水平和铅直入射平面在焦平面上像线交点的纵坐标y′,再计算目标大地方位角ξ,方法与上述通过计算横坐标x′的类似,在此不再详述:若σ和η都不低于其设定的阈值,则返回采集下一时刻数据[6]。
3 软件实现
通过软件方法就可实现目标大地方位解算,不需要再增加硬件资源,从而利于系统的实现。本系统中探测器为焦平面阵列规模 320×256,像元间距30 μm的红外热像仪,焦距f=150 mm,系统总高度 H=1 000 mm。在光电探测装置漂浮于海面对水面目标进行周视跟踪和目标指示过程中,控制软件包将根据上节所述算法完成对目标的全方位解算过程。
采集当前时刻装置的姿态位置量(h,p,r,θ,φ),具体数值为:
(h,p,r,θ,φ)=(-0.9881,0.4226,-0.2790,0.8509,-0.089 5),单位是 rad;
利用式 (1) 计算可得:D31=0.251 1,D32=0.410 1,D33=0.876 8,中间变量 t=-0.493 2。
利用式(2)得中间变量e=1.721 2。
利用式(3)计算可得海天平面经反射后出射光平面法向量χ⇀=(1.060 3,1.256 6,0.509 1)。
利用式(4)计算航向变化因子的数值,得 D11=0.623 3、D12=-0.761 5、D13=0.177 6、D21=0.740 5、D22=0.501 9、D23=-0.446 9。
利用式(5),计算中间变量得 W=-1.400 0,M=-0.242 2。
从视频跟踪器读取当前目标视频水平偏差量σ和铅直偏差量η,本例中,当前目标视频水平偏差量σ=+58、铅直偏差量η=-59。经判断,σ噪声低于设定阈值。
从而,利用式(6)计算水平和铅直入射平面在焦平面上像线交点的横坐标 x′,并令 x′=σ=+58。
利用式(7),计算可得目标方位角 ξ=-25.793 5°。
所得 ξ=-25.793 5°不满足 ξ∈[0,π/2]关系式,并经计算关系式 h+arctan(η/f)+θ=-29.331 9°∉(1/2π,π),则目标大地方位角为-25.793 5°。则向战斗单元发送以探测装置为原点以真北为基准的目标方位角为-25.793 5°。判断系统是否接收到退出目指模式指令,若是,则流程结束;若为否,则采集下一时刻装置姿态角位置量(h,p,r,θ,φ)进入循环。图 3 是本系统中目标水平和铅直偏差量的视频截图。

图3 目标水平和铅直偏差量的视频截图Fig.3 Target horizontal and vertical deviation
4 结束语
本方法所需数据量均由装置自身传感器获得,不需要其他系统提供航向和姿态数据,仅需要一维目标视频偏差量,即水平偏差量或铅直偏差量,允许在水平偏差量和铅直偏差量中选择噪声低于设定阈值的偏差量或者选取噪声水平较低的量,有力地提高了目标指示精度。上反式光电探测装置周视搜索、跟踪过程中,存在非线性像旋,本方法通过条件判断,克服了反正切函数主值范围仅覆盖(-90°,+90°)的缺点,使目标指示范围扩展至[-180°,180],实现目标大地方位角指示的全方位覆盖。本方法有效解决了光电周视探测装置自主化、小型化技术瓶颈,使光电探测装置的功能得以提升。
[1]石秀华.水中兵器概论(鱼雷部分)[M].西安:西北工业大学出版社,1995.
[2]高雅允,高岳,张开华.军用光电系统[M].北京:北京理工大学出版社,1996.
[3]雷玉堂,王庆有,何加铭,等.光电检测技术[M].北京:中国计量出版社,1996.
[4]江涛,陈方斌,李广良,等.漂浮式水面周视探测器探测周期的定性定量分析[J].应用光学,2007,28(专刊):20-23.
JIANG Tao,CHEN Fang-bin,LI Guang-liang,et al.Qualitative and quantitative analysisofdetective period fornavy photoelectric cautionary detector[J].Journal of Applied Optics,2007,28(sup):20-23.
[5]江涛,陈方斌,王小齐,等.两轴周视光电跟踪天际线焦平面像的解析表达[J].应用光学,2009,30(1):20-24.
JIANG Tao,CHEN Fang-bin,WANG Xiao-qi,et al.Analytic expression of horizon imaging on infrared focal plane array in panoramic electro-optical tracker[J].Journal of Applied Optics,2009,30(1):20-24.
[6]H奈茨.数学公式[M].北京:海洋出版社,1983.
猜你喜欢
幼儿园(2021年12期)2021-11-06
空间科学学报(2020年4期)2020-04-22
现代计算机(2018年19期)2018-08-01
中学生数理化·七年级数学人教版(2018年4期)2018-06-28
数学大世界(2018年1期)2018-04-12
中等数学(2017年2期)2017-06-01
中学生数理化·七年级数学人教版(2017年1期)2017-03-25
中国修辞(2016年0期)2016-03-20
火控雷达技术(2016年2期)2016-02-06
河南科技(2015年18期)2015-11-25
