
基于FPGA的PWM整流器控制研究
2013-09-26 06:04:04李子萧
电子测试 2013年2期
李子萧 燕 磬
(长沙理工大学电气与信息工程学院,长沙 410114)
1 引言
随着电力电子设备的广泛应用同时也对电网注入了大量谐波和无功,造成严重的电网“污染”。谐波会影响线路的稳定运行,造成电网功率损耗增加,缩短电缆的使用寿命,对周围环境产生电磁干扰影响通讯,同时还会使电气仪表测量不准确。在这些产生谐波的电力电子设备中整流装置所占比例最大。这些不控或者半控型整流装置含有大量低次谐波,消耗大量无功功率。使用有源滤波器体积和重量都很大损耗也较大,并联电容进行无功补偿是静态补偿,都只能缓解整流器对电网的污染。对电力电子设备进行改进,通过变换设备输入侧的电流和电压实现同相位,从而不再产生谐波不消耗无功功率。这样从根本上解决整流设备对电网的影响。
PWM整流器就是一种消除了谐波源的整流设备,利用脉冲宽度调制(PWM)技术使整流器获得单位功率因素和正弦化输入电流。PWM整流器是一个交、直流侧均可控的四象限运行的交流装置,被称为“绿色电能变换器”对于PWM整流器来说,其控制策略的研究显得十分重要,是提高整流器性能的关键所在。随着现代控制理论和智能控制理论的发展和应用,以及PWM控制技术的发展,如空间矢量PWM、滞环电流PWM控制方法的出现,优良的控制方案使得PWM整流器性能大大提高。
控制器的性能决定了PWM整流器的性能,目前控制芯片大部分是DSP,传统的DSP数据传输仍然是串行的,数据输入、输出能力相对FPGA要低。FPGA的集成度非常大,一片FPGA可将微处理器、硬件算法模块、信号采集处理模块、波形发生模块集成在一块芯片上,使用FPGA器件可将原来的电路板级产品集成为芯片级产品,不仅大大降低了功耗同时提高了可靠性,还可以对设计进行在线修改,大大降低了设计难度。FPGA的运算采取并行方式,在频率一定得情况下可以大大提高运算速度。
2 PWM整流器的数学模型
三相电压型整流器数学模型就是根据三项电压型整流器拓扑结构,在三相静止坐标系(a,b,c)中,利用电路基本定律(基尔霍夫电压、电流定律)对三相电压型整流器所建立的一般数学描述。

图1 三相电压型整流器主电路拓扑图
该数学模型的下建立有以下假设条件:电网电动势为三相平稳的纯正弦波电动势,网侧滤波电感L是线性的,且不考虑饱和,功率开关管损耗以电阻RS表示,即实际的功率开关管可由理想开关与损耗电阻RS串联等效表示。
为分析方便,首先定义单极性二值逻辑开关函数

将整流器的功率开关管损耗等效电阻RS同交流滤波电感等效电阻RL合并,且令R=RS+RL,采用基尔霍夫电压定律建立三相整流器a回路方程为:
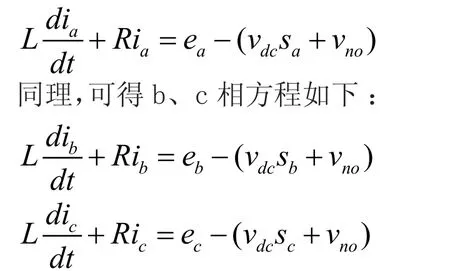
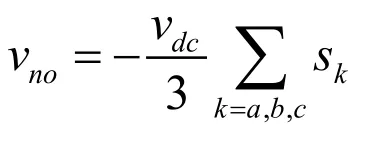
根据假设条件,系统是三相对称的,则

联立上面四式可得
直流侧电流idc可描述为

对直流侧电容正极点处应用基尔霍夫电流定律,得

联立上面各公式可得,在三相静止对称坐标系(a,b,c)中,三相整流器开关函数模型为:
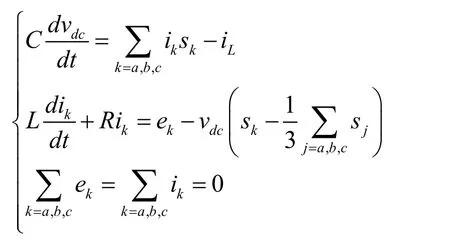
将电感电流与电容电压作为状态变量X = [ iaibicvdc]T,则三相电压型整流器系统数学模型的状态空间表达式为:

由上述状态空间表达式可知:三相电压型整流器系统是带有开关函数的、强耦合的、非线性时变系统。
3 PWM整流器控制策略
一般在PWM整流器控制系统的设计,都采用电流电环控制电压外环控制的双闭环控制方式。其中,电流内环的动态特性直接影响电压外环的控制性能。在电流内环控制中,主要有间接电流控制和直接电流控制两种方法。间接电流控制虽然结构简单,但PWM整流器电流动态响应较慢,同时,由于控制算法及参数都建立在静态模型基础上,无法获得较高品质的电流响应,一般应用于对控制结构要求简单而且动态响应要求不高的场合。快速电流反馈控制是直接电流控制的主要特点,直接电流控制是在网侧实现了电流闭关控制,使得PWM整流器控制系统在提高动、静态性能的同时,大大提高了系统的鲁棒性。直接电流控制有滞环电流控制、空间矢量电流控制、固定开关频率电流控制等。
3.1 滞环电流PWM控制策略
在滞环电流PWM控制结构中用滞环来代替传统的电流调节器,这是一种典型的非线性控制,在电流偏差超过滞环宽度时,调节输入开关信号,使主电路功率开关器件进行切换,以减小电流偏差,因此该系统具有较快的系统响应和较好的稳定性。
在三相PWM整流器中,系统检测直流侧母线电压vdc,再与给定电压比较之后,经过PI控制器获得给定三相电流值im,再将im与给定的三相相位信号sina、sinb、sinc相乘,即得到三相电流的给定值。检测电流ia、ib、ic与给定值比较后,将偏差信号送入滞环调节器,再根据还宽大小输出开关信号sa、sb、sc,经过死区设置得到PWM整流器的驱动信号,控制开关器件的导通与关断,实现对PWM整理器的控制。
根据文献X可得系统内环传递函数如下图所示

图2 电流内环传递函数方框图
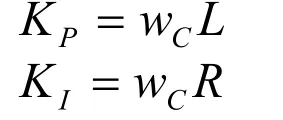
选取适当的Kp和Ki参数,令Ki/Kp=R/L,再将传递函数化简,可得:

当闭环系统的增益减小至-3dB时,可得到系统的闭环频带宽度ωc与GS=1.414[9]
由此得到ωcTc=1,即得到Kp、K和ωc的关系式
对于电压外环的设计,由文献[9]可得到

4 控制的FPGA实现
当前MCU/DSP是大部分整流器的控制核心,用软件实现运算及控制,这种方案主要依赖处理器的性能。而且目前处理器进行的运算大部分都是串行方式,计算效率并不高。FPGA的出现使得该问题有了全新的解决办法。几乎所有的逻辑电路都可以用FPGA来实现,上至高性能CPU,下至74系列电路,都可以用FPGA来实现,而且现在是市面上高端的FPGA都整合了DSP内核。在整流器控制中,FPGA可以完成功能包括A/D与D/A控制、储存空间分配、数字PID控制器、PWM驱动脉冲生成等。使设计由电路板级变为芯片级,大大降低了设计难度。
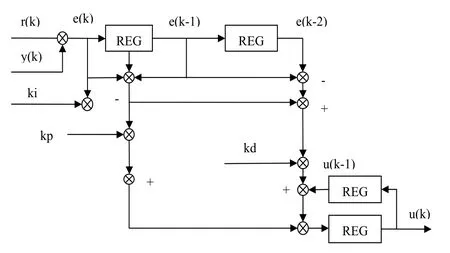
增量型PID控制算法:
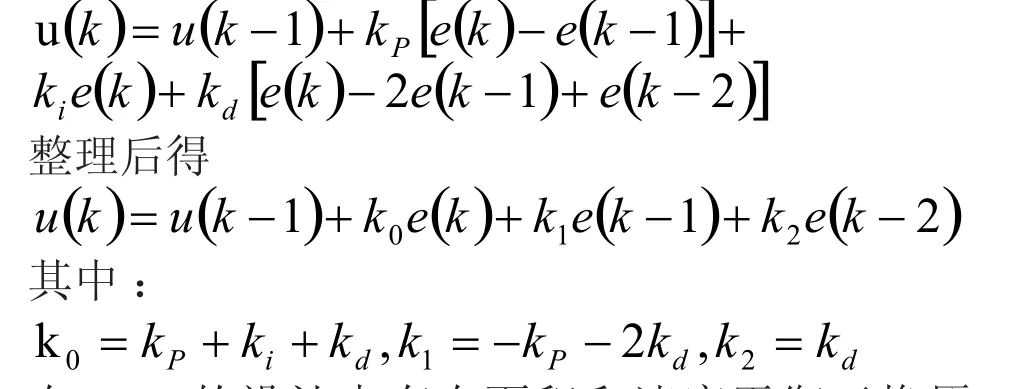
在FPGA的设计中存在面积和速度平衡互换原则,面积和速度不可兼得。在频率一定的情况下,要想使FPGA运算速度快,就必须使用大量的逻辑单元,从而使芯片面积增加。反之,占用最小芯片面积则会使运算速度大大降低。随着FPGA技术的飞速发展,一块FPGA上面集成的逻辑单元大大增加,使得我们在设计时可以占用更多的逻辑资源,用面积换取速度。并行结构就是基于这种思想,每一步的运算都有自己的运算模块来完成该步骤的运算。用并行方法实现PID的FPGA设计一共需要三个乘法器,4个加法器,三个减法器。
由于整流器控制器为PI控制器,所以可以将讲增量型PID控制器简化为


5 实验结果与分析
在整流状态下得到的仿真结果如图3所示,将负载电阻接入时增大直流侧负载,直流母线电压很快上升到给定值,并在负载变化时能很快恢复稳定。

图3 整流状态下负载改变时PWM整流器直流母线电压波形图
通过仿真结果,可以得出,滞环电流控制策略是一种非常可靠的控制策略,采用该控制方法的PWM整流器系统响应快,动态性能好,在负载突变时任然具有良好的动态性能,实现PWM整流器的实时有效的控制。
[1] 何西凤.基于FPGA的数字华通用PWM控制器设计[D].成都:四川大学,2005.
[2] 张崇巍,杨君,刘进军.PWM整流器及其控制[M].北京:机械工业出版社,2006.
[3] 张悦.基于FPGA的PWM整流控制器研究[D].天津:天津理工大学,2008.
[4] 林飞.电力电子应用技术的MATLAB仿真[M].北京:中国电力出版社,2009.
[5] 王兆安,黄俊.电力电子技术[M].北京:机械工业出版社,2006.
[6] 任小青.基于FPGA的PWM控制器设计及应用[D].西安:西安科技大学,2009.
[7] 常栋梁.基于FPGA的数字PWM控制器的研制[D].西安:西安科技大学,2008.
[8] 任爱锋,处秀琴,常存.基于FPGA的嵌入式系统设计[M].西安:西安电子科技大学出版社,2004.
[9] 刘坤.PWM整流器控制策略的研究[D].北京:北方工业大学,2009.
[10] 苏世轩.基于FPGA的模糊PID控制器的设计[D].沈阳:东北大学,2009.
猜你喜欢
科学家(2021年24期)2021-04-25 17:55:12
能源工程(2020年6期)2021-01-26 00:55:22
哈尔滨铁道科技(2020年4期)2020-07-22 02:22:28
山东冶金(2019年3期)2019-07-10 00:54:04
消费导刊(2018年10期)2018-08-20 02:57:02
通信电源技术(2016年1期)2016-04-16 04:57:26
通信电源技术(2016年4期)2016-04-04 02:57:16
电源技术(2015年1期)2015-08-22 11:16:26
电源技术(2015年12期)2015-08-21 08:58:44
电测与仪表(2015年12期)2015-04-09 11:44:44
