数字式多相电流吸收负载研究
2013-09-26 02:58王树人莫岳平
电源学报 2013年1期
王树人,蒋 伟,莫岳平
(扬州大学能源与动力工程学院,江苏 扬州225127)
引言
随着能源技术的发展,各类新型发电与储能装置应运而生,并逐渐获得广泛应用;同时,电子信息与工业控制领域也不断涌现出诸多新的电子产品。由于采用了新技术与新工艺,这些装置与产品常对电源供应有一些特殊限制;这就对其供电电源与功率调节器的设计提出了更高的要求。
能耗式电子负载可以用来模拟真实的用电设备;通过控制开关器件的导通量,实现对负载电流、电压、功率的控制。所以电子负载在电源变换器的输出动/静态性能测试、未知供电系统或装置的特性识别方面都有非常重要的意义。
目前在实际应用领域,电子负载的控制仍以模拟实现为主,数字式产品占有率较低。而模拟控制系统适应性较差,不能满足对电源的复杂测试要求。数字型电子负载则具有稳定性强,特性易于控制等优点,可以自动地调节负载特性、切换负载模式,以满足不同输出特性的测试要求。但是数字式电子负载也有较大改进空间:数字控制器的主频限制了系统的开关频率与采样率,这在根本上限制了系统的控制带宽;另外由于多数系统使用了数字PWM控制技术,也导致系统电压电流纹波较大[1-6]。有关研究者提出了模拟与开关式混合的电子负载结构,提高了电子负载的暂态响应,也有研究者提出了用数模转换的方式驱动MOSFET,但这些解决方案在系统成本或稳定性方面都有其局限性。
本文设计的数字式电流吸收负载采取了以宽安全工作区的线性MOSFET作为能耗元件,以数字控制回路代替传统的模拟回路的方案。调制模式采用高频高精度多相交错PWM的方案进行主动式电流纹波抑制,克服了数字电力电子系统中的固有问题。采用16位数字信号控制器(DSC)实现闭环电流控制,满足了系统快速性和稳定性的要求。
1 系统原理与设计
1.1 系统结构
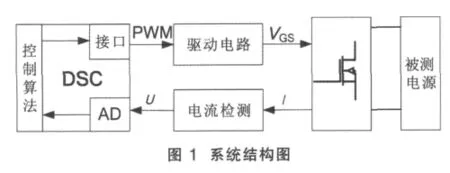
如图1所示,数字式电流吸收负载系统主要由功率MOSFET负载电路、电流检测电路、控制器模块、功率MOSFET驱动电路四部分组成。控制系统采集功率器件的电流与参考值进行比较,将误差进行放大并生成新的驱动信号VGS;控制系统将MOSFET的稳态工作点保持在饱和区,从被测系统中吸收恒定的或按规律变化的电流。
1.2 功率MOSFET及其驱动电路设计
功率半导体器件优点在于调节精度高和速度快,而且通过改变控制方法,不仅可以模拟实际的负载情况,还可以模拟一些特定负载波形曲线,测试电源的稳态和动态特性。
本设计选用IXYS公司的一款具有较宽正偏安全工作区 (FBSOA)的线性功率 MOSFET产品IXTH80N20L作为负载器件。IXTH80N20L可耐压200 V,ID在 25℃时(ID25)最大为 80 A。 设计过程中通过对器件电压电流的检测与上限值的控制,保证其始终处于FBSOA之内,以达到保护器件的目的。
由于MOSFET具有正温度系数,本设计中负载电路由四路并联的MOSFET组成,四路MOSFET门极分别与各自的驱动电路相连,研究中提出的多路分流方法可以增加系统的可靠性。
图2为驱动电路图,对应一路PWM输入信号。驱动器采用晶体三级管实现PWM信号放大功能,三极管的开关速度符合设计要求的快速性。驱动电路的输入为四路200 kHz TTL电平的PWM信号,输出为峰值为12 V的PWM波;每路输出经过RC滤波器得到一定纹波的直流电压信号用于驱动MOSFET。综合考虑RC滤波器引入的相角跌落与VGS的纹波,将RC滤波器的截止频率选在16 kHz,即略小于开关频率的10倍频程。

图2 单路PWM驱动原理图
1.3 电流采样电路设计
系统工作时,主电路的大电流检测采用闭环霍尔电流传感器,这种方法的测量精度相对较高,稳定性好。本设计采用的电流传感器输出为电压值,输出电压与采样电流的关系为:

由于稳态负载电流纹波不大,所以输出的电压信号使用截止频率约16 kHz的低通RC滤波电路滤波,再送至控制器供A/D模块采样。
1.4 控制系统分析
电流吸收负载系统的功率级为四路交错控制的MOSFET,可取一路进行控制系统分析[7]。图3为单路控制系统框图,其中滤波环节均为一阶无源RC滤波器;电流传感器的小信号增益为式(1)中函数斜率;K可以在MOSFET饱和区的输出特性得到;PI为比例积分控制器。
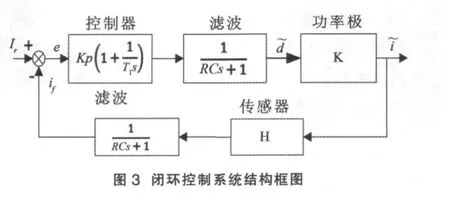


图4为系统的开环传递函数波特图,由图可知,经过补偿的控制回路穿越频率为10 kHz,相位裕量为70°,满足系统稳定性与相应速度的要求。
2 数字控制实现
本设计选择了Microchip公司的数字信号控制器 (dsPIC33FJ64GS606);芯片最高内核频率为40 MHz,带有丰富的PWM外设以及可同步触发的10位A/D转换器。
2.1 四相交错PWM与A/D设置
设置通过配置周期寄存器使PWM输出频率为200 kHz,初始占空比为50%,通过phase寄存器设置相对相位相差为90°;则四相PWM波初始状态如图5所示。ADC触发同步于PWM,采样频率设为40 kHz,即每5个PWM周期触发一次AD采样。
2.2 程序设计
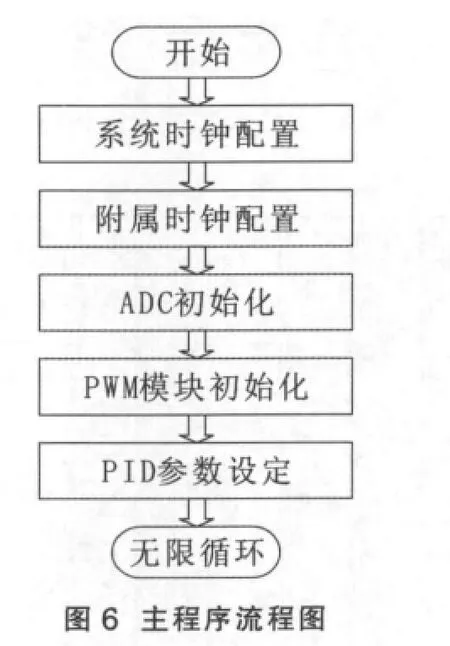
程序整体分成主程序与中断子程序两部分,主程序主要对系统进行振荡器配置、PID参数的初始化、PWM初始化、ADC初始化。在主程序中,设置系统时钟频率(Fosc)为 60 MHz,时钟输出(Fcy)为 30 MHz;由于高速ADC模块和PWM模块使用附属时钟作为时钟源,所以要配置附属时钟为120 MHz;流程图如图6所示。
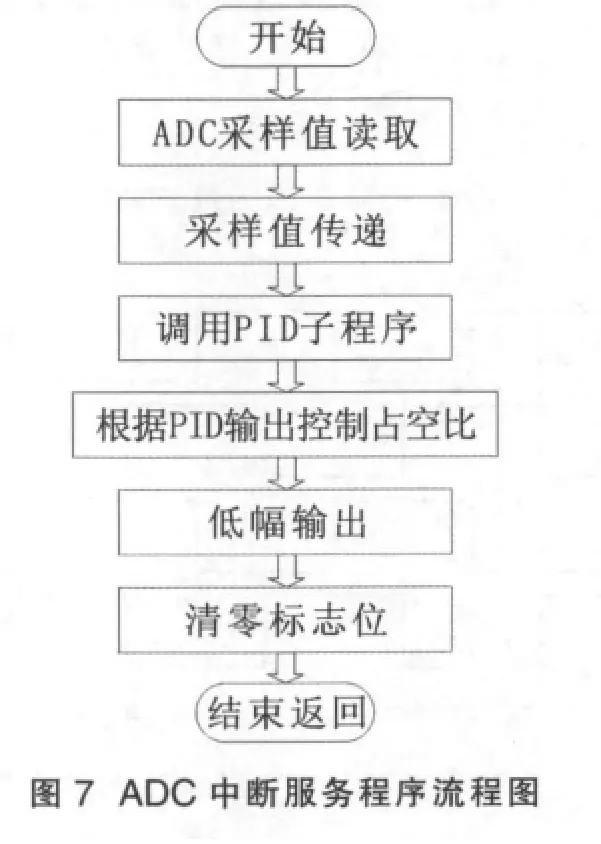
当ADC中断标志位置位,程序进入中断服务子程序。中断程序提取AD的采样值,进行PID运算,最后同时更新四路PWM的占空比。需要注意的是,PID程序中需要根据驱动电路供电电压而设置限幅值[8],将滤波后的门极电压限制在约0~5 V的范围内,使MOSFET工作于饱和区;流程图如图7所示。
3 实验结果与分析


系统测试包括驱动电路性能测试、恒流模式稳态测试、动态测试以及脉冲电流负载测试。驱动电路的性能是系统实现闭环实时控制的重要保证。如图8中所示,通道CH1、CH2、CH4的波形对应于图2中所示的测试点A、B、C。测试结果表明驱动电路可以对200 kHz的PWM信号进行有效放大。图9为四路PWM滤波后加在门极的电压,波形表明四路PWM的相位关系。
恒流吸收负载模式下,只要负载端电压在FBSOA的设定范围之内,负载电流将始终保持恒定。实验中,输入电压范围为2~12 V,电流设定值为3 A。图10所示当输入电压为9 V时,负载电流平均值保持在3 A。由图10中波形可知,对于测试用稳压直流电源RXN-3010D-II,由于受到电子负载稳态电流纹波的影响,输出电压波形会出现同频率的纹波。
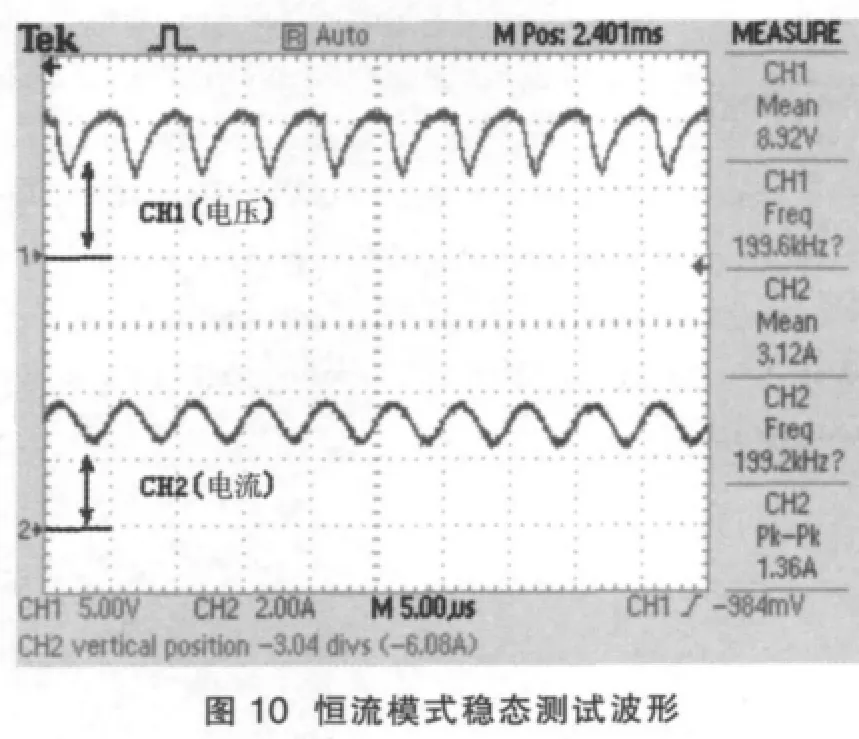
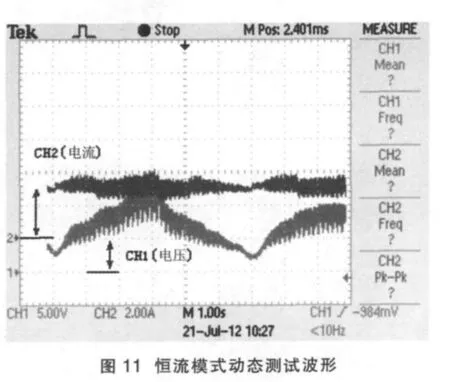
图11为恒流电流吸收负载模式下的动态测试。通道CH1代表被测电源输出电压,通道CH2代表受控负载电流波形。如图所示,如改变负载端电压,系统响应的电流波形的平均值保持不变,且响应时间短,符合系统设计要求。但也看到,当输入电压较小时,电源输出电压波形和主电路电流波形的纹波相对较小。当输入电压变大时,由于VGS是PWM滤波后所得,所以其纹波的存在会影响器件导电沟道的等效阻抗,故负载电压增大时负载电流的纹波也会变大,但是平均值受闭环回路控制,故无影响。
在控制器中设置电流设定值在4 A和8 A之间循环跳跃,观察电源对脉冲电流的响应情况。如图12所示。通道CH1是被测电源电压,通道CH2是负载电流波形。据电流波形可知,负载电流可跟随变化的指令,且响应时间与超调量均符合系统设计的暂态要求。此外,由图12中电压波形(CH1)可知,当外部需求的电流发生改变,被测恒压源输出电压的暂态值和脉冲周期内的平均值也会发生一定的改变。由此可知此稳压电源无法很好的响应快速变化的负载。
4 结论
本论文设计了基于数字控制的多相电流吸收负载,通过控制该负载中线性功率MOSFET的输出阻抗(导通量),实现了对负载电流的可靠控制;基于反馈控制理论设计的闭环控制系统实现了电流吸收负载特性,同时也提高了控制精度;用高频PWM控制代替D/A转换控制,不仅可以实现控制要求,而且降低了设计成本。实验测试表明,该电流吸收负载具有较好的稳态、动态特性,可用于未来数字化的电源测试设备。

[1]A Sattar,V Tsukanov.MOSFETs withstand stress of linearmode operation [J].Power Electronics Technology,2007:34-39.
[2]J Ramirez,E Torres.An electronic load controller for the self-excited induction generator[J].IEEE,Transactions on Energy Conversion,2007,22(2):546-548
[3]Saurabh Upadhyay,Santanu Mishra.A Wide Bandwidth Electronic Load[J].IEEE Transactions on Industrial Electronics,Feb.2012,59(2):733-739.
[4]台湾博计电子.开关电源测试中电子负载的选用 [J].电源技术应用,2007(9):79-83.
[5]王志强,王莉.一种新颖的MOSFET驱动电路[J].电力电子技术,2005,39(1):92-94.
[6]刘冲,于利红.直流电子负载测试方法研究[J].今日电子,2011(8):44-45.
[7]Gene F Franklin,J David Powell,Abbas Emami-Naeini.Feedback Control of Dynamic Systems(Fifth Edition)[M].London:Pearson Education,2006.
[8]于海生.微型计算机控制技术(第2版)[M].北京:清华大学出版社,2009.
猜你喜欢
车辆与动力技术(2019年3期)2019-10-23
阅读(快乐英语高年级)(2019年2期)2019-09-10
光源与照明(2019年4期)2019-05-20
测控技术(2018年2期)2018-12-09
雷达学报(2018年5期)2018-12-05
科技视界(2018年24期)2018-01-03
电镀与环保(2016年3期)2017-01-20
通信电源技术(2016年3期)2016-03-26
消费者报道(2016年3期)2016-02-28
焊接(2016年5期)2016-02-27