盾构机动态交互仿真系统的研究与实现
2013-09-21 09:54冯桂珍池建斌张增强
图学学报 2013年1期
冯桂珍, 池建斌, 张增强, 王 晨
(石家庄铁道大学机械工程学院,河北 石家庄 050043)
盾构机是一种用于地下隧道工程开挖的复杂机电系统,具有开控切削土体、输送土碴、拼装隧道衬砌、测量导向纠偏等功能[1]。已广泛用于地铁、铁路、公路、市政、水电隧道工程,具有开挖速度快、质量高、人员劳动强度小、对地表沉降和环境影响小等优点,比之传统的钻爆法隧道施工具有明显的优势,有着良好的综合效益。现代高新技术的发展和应用使得对盾构机的控制变得越来越容易[2],自动化程度大大提高,但施工控制多数需人工操作,但施工过程中因不确定因素时常引发一些事故,存在安全隐患,如地质情况的复杂多变、掘进等结构设计不当、操作不当等原因导致地表隆起或塌陷,进而引发重大事故。因此,盾构机掘进施工过程是一个存在高风险的行业,施工安全、效率问题仍是世界性的重大技术难题。此外,盾构机是一个复杂、庞大的重型工程机械,它集机、电、液、控制、信息技术于一体,其高效率、低伤害的施工特点引起了国内外大量学者的研究兴趣,但其复杂性给学习和研究带来一定的困难。
鉴于此,研究和应用基于网络的虚拟现实技术,构建一个基于 Web3D的盾构机交互虚拟装配和运动仿真虚拟环境,将盾构机的结构特点、装配与拆卸、运动过程和施工原理等进行三维真实感模拟,无安全隐患。基于网络环境不受时空限制,用户通过鼠标或键盘从各个角度观察、体验盾构机的不同特性,使用户更好地了解盾构机,从而增强盾构机与用户之间的沟通能力,进一步提高设计和创新能力 。
1 系统框架结构设计
1.1 盾构机结构与原理简介
论文以土压平衡式盾构机为研究和构建对象。土压平衡式盾构机没有分离装置,施工时的覆土层可以相对较浅。其适用地质范围比挤压式盾构机广,掘进性能也优于挤压式盾构机。作为一种在地下工程施工中开挖软弱地质的专用工程机械,主要结构包括盾体、刀盘驱动系统、推进系统、排渣系统、管片拼装系统、同步注浆系统以及盾尾密封系统等。盾构机掘进部分承担主要的挖掘任务,包括切削刀盘、开挖室、承压隔板、压缩空气闸室、推进千斤顶、刀盘驱动、螺旋输送机等。
盾构施工的主要原理是圆柱体护盾沿隧道轴线边向前推进边对土壤进行挖掘,护盾对挖掘出的还未衬砌的隧洞段起着临时支撑作用,承受周围土层的压力,以及地下水压及将地下水挡在外面。挖掘、排土、衬砌等作业在护盾的掩护下进行。盾构机施工主要由稳定开挖面、挖掘及排土、衬砌及壁后注浆3大要素组成。
1.2 系统框架结构设计
系统采用服务器/浏览器(B/S)两层模式,服务器端存放由VRML[3]及Cult3d[4]编辑生成的虚拟场景和运动仿真,客户端下载并安装相关插件后,浏览嵌入VRML格式文件(*.wrl)和Cult3d动态文件(*.co)的HTML页面,用户通过鼠标、键盘及控件在虚拟场景中漫游、交互操作虚拟对象和运动仿真等。该系统的框架结构如图1所示,具有交互操作、信息查询、虚拟装配、施工原理展示以及良好的导航功能等。系统的场景漫游与交互控制利用 VRML完成;盾构机的运动仿真等交互利用Cult3D完成;脚本控制利用Javascript实现HTML与VRML和Cult3D的交互控制。虚拟场景漫游与交互操作使得盾构机的虚拟仿真更具真实感和沉浸感。VRML与Cult3D通过超链接功能相互切换。
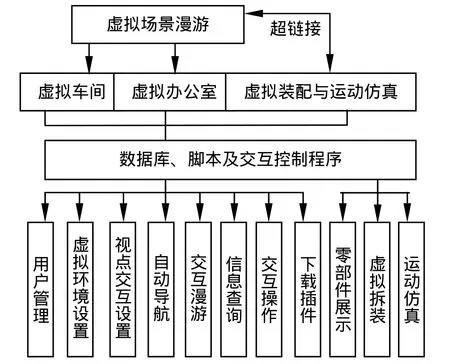
图1 系统框架结构
2 系统的设计和实现
2.1 虚拟模型的创建与优化处理
虚拟场景利用VRML实现。VRML是一种网络三维场景描述性语言,VRML语言使用有向无循环图(TAG)或称场景图(SceneGraph)建立三维场景的布局关系,这种场景图是由节点的嵌套或并列使用形成的,其中叶节点表示具体的三维对象,非叶节点用于维护布局的空间位置关系。其三维模型的创建可以通过 VRML文本编辑器如Parallel Graphics公司的VrmlPad完成,或一些可视化编辑工具,如Parallel Graphics公司 ISB、ISA,Silicon Graphics公司的 Cosmo World,以及笔者利用VC与 OpenGL开发了一个VRML可视化编辑工具[5-6]等,但不便于构建复杂场景。此外,可通过其他三维软件完成。VRML作为目前唯一一种网络传输规范,大多数软件都支持 VRML格式文件,如 3DMax、Solidworks、Pro/E、UG 等,这种方式可以构建复杂模型,且效率较高。鉴于模型建造的工作量及复杂度较大,系统采用3DMax、Solidworks及文本编辑相结合的方式完成。
为保证用户能顺畅地漫游和交互操作,模型优化非常重要。VRML优化分为模型自身优化以及利用语法特点优化两种。模型自身优化就是利用 3DMax等建模时将结构分解,尽量采用拉伸或放样功能生成简单几何形体的组合,然后进行纹理帖图。这样可以大量减少模型的三角面片,从而减少 VRML文件大小,加快用户端下载速度。利用 VRML自身的语法特点和功能优化包括:用LOD节点描述复杂造型不同细节层次的组织关系,用户浏览时,根据远近程度自动显示不同的细节水平,从而提高场景真实感和渲染速度;利用inline节点,将不同VRML文件内联成复杂的场景,简化了复杂场景的维护和编辑工作;使用DEF/USE机制减少代码的重复编写,且可达到统一修改、编辑和控制的目的;将VRML文件保存为压缩形式(*.wrz),压缩VRML文本代码中无效的部分(如空格、注释、回车符等),可极大的减小文件大小,压缩率可达到80%,而不影响场景渲染效果。
盾构机的三维模型及装配采用Solidworks完成,以便于后期参数化编辑和修改,以及运动仿真设计、干涉检查等。虚拟装配是产品数字化定义中的一个重要的环节,其研究大致分两个方面:
1) 采用装配过程可视化手段和干涉检查工具,直观展示产品装配过程中零部件的运动形态和相对位置,以检验产品的可装配性,是否存在干涉等。如在Solidworks的装配环境下设计的装配体,用户通过添加约束定位来装配零部件,通过干涉检查检查产品是否存在干涉。之后通过Solidworks的MotionManager设计装配体的拆装动画和运动仿真,拆装动画和运动仿真只能保存为AVI格式的文件,无交互功能,不便于用户的控制。
2) 基于虚拟现实技术的虚拟装配和运动仿真。使操作人员具有身临其境的感觉,并能通过视觉、听觉、触觉等感知产品的装配过程和运动效果。本系统采用基于网络的 Web3D技术设计和开发的虚拟装配和运动仿真,通过鼠标和键盘简单的设备可交互操作,成本低,效果好,发布到网上便于交流和协作。
Cult3D模型设计和处理中注意如下:将Solidworks设计的装配体模型导出为STL格式文件,导入 3Dmax中编辑材质、添加光源、摄像头等,并根据动态交互的需求合理分组。然后将模型导出为C3D格式文件(Cult3D模型文件)。此外,根据动态交互效果要求,如缩放操作时缩放中心的位置,旋转操作时转轴的位置等,在3DMax中需调整轴点的位置。方法是通过3DMax命令“层次”/“轴点”,选择“仅影响轴”选项,通过“对齐”、“移动”、“旋转”等方法,将轴点调整到合适的位置。
2.2 虚拟场景漫游与交互设计和实现
VRML中的交互行为通过事件体系实现。要实现逻辑控制,必须通过脚本节点Script编程实现,如Java、JavaScript等。系统利用JavaScript脚本语言实现交互和逻辑控制。脚本程序可内嵌于 VRML文件内,即基于内部脚本编程接口的交互。也可通过外部编程接口EAI进行交互。EAI是指将VRML嵌入到HTML页面后,通过外部按钮等控件方式控制VRML场景中的虚拟对象,使操作和控制的自由度更大。
EAI控制的关键是获取 VRML虚拟对象,方法是通过Scene.Engine获取VRML对象,通过Nodes获取由DEF定义的节点,然后可以对该节点的exposedField域进行编辑和修改,从而实现对场景的外部控制。系统主界面如图2所示,分两个框架。上方显示 VRML场景,下方是交互控制区,通过下拉列表选择浏览位置进行导航,当前视点的信息显示在视点文本框,用户也可以设置视点。
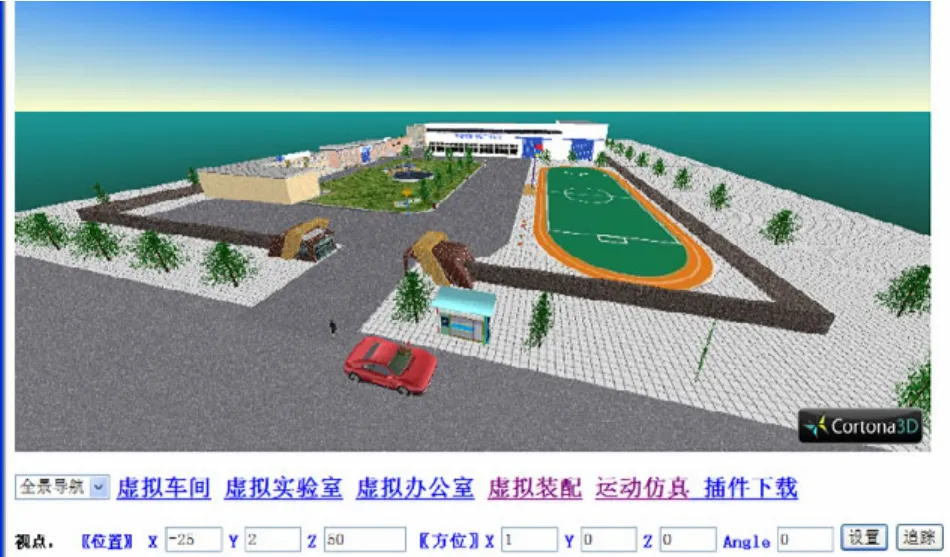
图2 虚拟场景漫游主界面
2.3 虚拟装配和运动仿真的设计
Cult3d是一个完全拖放式软件。从SceneGraph窗口选中将要操作的对象,拖入Event Map窗口,然后在Action窗口中选择要实施的动作,把它也拖入Event Map窗口,在Event Map中选择触发该动作的事件。Cult3D为用户提供了鼠标和键盘两种触发事件。通过预览窗口可以检查动作和事件以及操作对象之间的相互关系。
虚拟装配和运动仿真系统采用 HTML内嵌Cult3d动态文件的方式实现(图 3~图 5),包括零部件的单件展示、虚拟拆装、施工原理、插件下载及盾构机技术介绍等。系统通过顶部导航选择相应项目,左侧窗口提示操作步骤,右侧窗口显示 Cult3D动态文件。 虚拟装配主要通过Cult3d中的移动、旋转、缩放等动作完成,通过鼠标点击或键盘操作进行交互。其效果如图3所示。运动仿真除了移动、旋转、缩放等动作外,为了模拟开挖效果,采用粒子系统实现,如图4所示,刀盘旋转时开始挖掘,调整好的粒子系统开始发射,用来模拟实际挖掘过程,同时螺旋输送机将挖掘下来的泥土通过末端出土口输送到传输带上,传输带将泥土通过小车运输出去。图5显示刀盘推进后,管片拼装机拼装管片的过程。

图3 盾构机虚拟装配

图4 粒子模拟盾构机施工之开挖
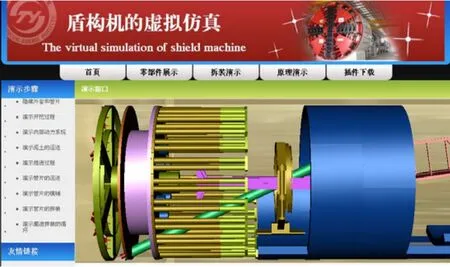
图5 盾构机施工之管片拼装
3 结 论
通过对盾构机的结构和原理的分析,利用VRML、Cult3D实现基于网络的盾构机虚拟装配与运动仿真系统,利用脚本实现虚拟场景和对象的交互操作和控制,具有良好的导航和交互性能,用户可以多角度任意方位查看虚拟对象,不受时空限制,克服了盾构机在施工过程中存在安全隐患等不足,对盾构机的学习和研究提供了良好平台,有很好的实用价值。
[1]Yang Huayong, Gong Guofang. Research on development strategy of shield tunneling machine [C]//Proceedings of Shanghai International Tunnel Conference. Shanghai: Tongii University Press, 2003:339-346.
[2]Michael J K. Monitoring ground deformation in tunneling: current practice in transportation tunnels [J].Engineering Geology, 2005, 79: 93-l13.
[3]ISO/IEC 14772-1:1997, VRML97 International Standard [S].
[4]Cycore Cult3D Homepage [EB/OL]. http://www.cult3D.com.
[5]冯桂珍, 池建斌. 基于 Web的虚拟现实模型创建工具[J]. 工程图学学报, 2004, 25(3): 30-34.
[6]冯桂珍, 池建斌, 王 晨. VRML模型创建工具中的可视化交互操作的设计和实现[J].系统仿真学报,2006, 18(2): 387-390.
猜你喜欢
机械工业标准化与质量(2022年6期)2022-08-12
建材发展导向(2021年11期)2021-07-28
装备制造技术(2020年2期)2020-12-14
河南科技学院学报(自然科学版)(2020年2期)2020-05-22
模具制造(2019年7期)2019-09-25
Coco薇(2017年9期)2017-09-07
中国卫生(2015年12期)2015-11-10
中国工程咨询(2015年9期)2015-02-25
科普童话·百科探秘(2014年9期)2014-09-16
小朋友·快乐手工(2014年4期)2014-08-16