基于D-S证据理论的数据链故障诊断方法
2013-09-19 10:18易昭湘郭甜甜
无线电工程 2013年4期
易昭湘,李 钊,王 刚,郭甜甜
(1.西安高技术研究所,陕西西安710025;2.二炮驻石家庄地区军事代表室,河北石家庄050081;3.第二炮兵装备研究院,北京100085;4.中国人民解放军96626部队,浙江东阳322100)
0 引言
作为无人机的重要组成部分,无人机数据链[1]连接着无人机和指挥控制站,保障两者之间快速、可靠和实时通信,因此,无人机数据链的可靠性对无人机作战性能的发挥起着决定性的作用。
目前,有关无人机数据链诊断方法的研究并不多,文献[2]基于无人机数据链工作原理,提出了无人机数据链自动测试系统设计方案,通过信号测量和性能指标判别进行故障诊断,易发生漏诊和误诊问题。文献[3]针对无人机数据链测试中存在的精度低、人为干扰大等问题,设计了基于GPIB总线的无人机数据链自动测试系统,可对接收机灵敏度、输出信噪比、AGC电压、中心频率和频率稳定度等指标进行测试,实现无人机的指标测试和故障诊断。文献[4]等针对无人机数据链发射机故障,提出了一种基于决策树SVM的故障诊断方法,将故障准确定位到内部功能模块,有效地提高了故障诊断的正确率。由此可见,目前对无人机数据链的诊断主要集中于故障检测,即通过测量值和参考值进行比较以判别故障,这种方法较为简单,但故障诊断精度相对较低,并且需要专家进行辅助分析才能实现故障定位;同时,当前的故障诊断方法主要针对的是发射机或接收机,欠缺对无人机数据链整个系统的有效诊断手段。
为此,提出了一种基于D-S证据理论的无人机数据链故障诊断方法,设计系统级和电路板级2层诊断框架,将故障现象作为证据对无人机数据链实施系统级诊断,利用系统性能参数作为证据对无人机数据链进行电路板级故障诊断。实验证明该方法正确、有效,为无人机数据链故障诊断提供了新的途径。
1 无人机数据链故障诊断框架
1.1 无人机数据链工作原理
通常,无人机数据链系统由两部分设备组成:一部分安装在无人机上,另一部分则安装在地面控制站内。一般将数据链系统的地面部分称为GDT,而将系统的机载部分称为机载测控设备。按照功能将数据链系统划分为信号处理及显示分系统、发射分系统、天线分系统和接收分系统等4个部分。其基本工作原理是:测控终端发出的遥控信号送往发射系统,经过调制放大由天线辐射出去。在接收端,天线将电磁信号转变成射频信号送给接收系统,接收系统将射频信号再转变成基带信号送给飞控机处理;飞控机发出的遥测信号送给发射系统,调制放大后经天线辐射出去,接收系统接收处理后送给测控终端。
1.2 诊断框架
由无人机数据链工作原理可知,系统结构复杂,设备种类多,直接进行故障诊断和定位比较困难。为此,采用分层诊断的思想,首先根据故障现象,建立初步故障征兆,结合故障记录和专家知识,运用融合诊断算法进行初步诊断,得出疑似故障分系统,再对故障分系统进行性能指标参数检测,得到分系统的性能指标数据,对测试数据进行特征提取建立故障征兆,运用融合算法推理诊断得出最终的故障电路板,从而实现系统的故障定位。根据分层诊断的思想,设计无人机数据链故障诊断框架如图1所示。
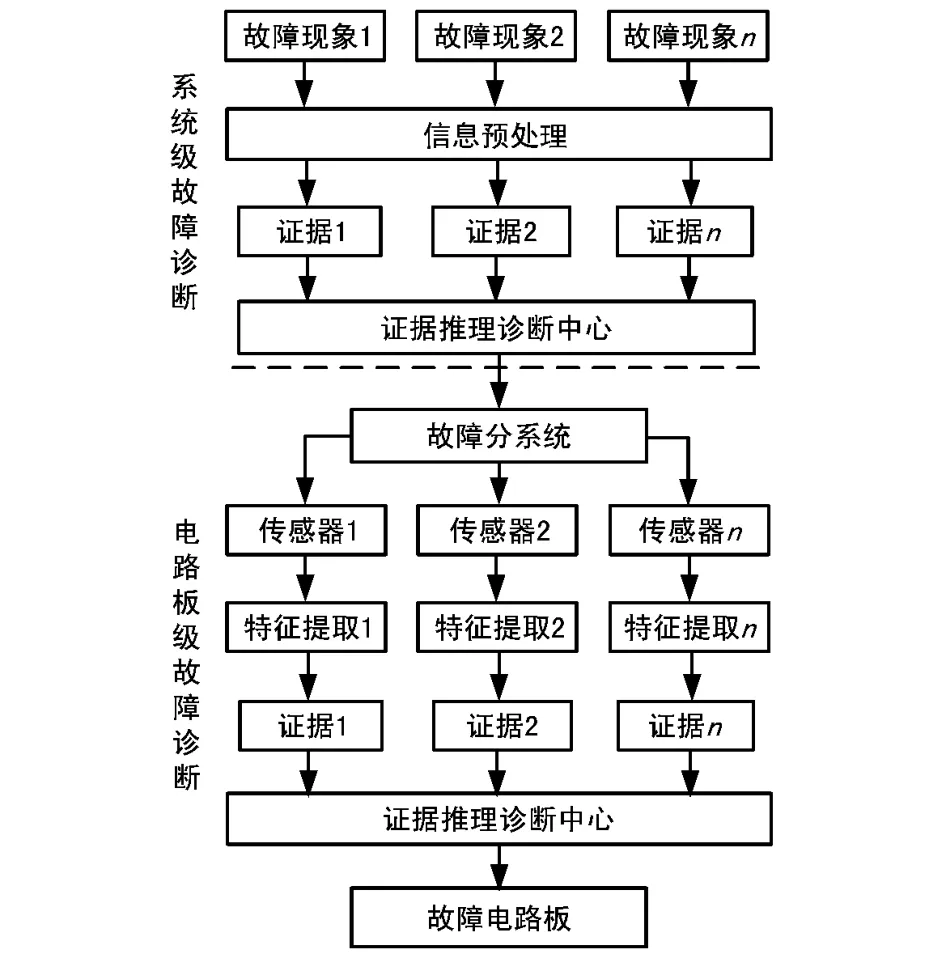
图1 无人机数据链故障诊断框架
2 基于D-S证据理论的故障诊断方法
由于无人机数据链在运行环境、传感器信号以及数据的采集和处理中存在着不确定性,给检测和诊断过程带来了诸多问题,考虑到证据理论在处理多传感器数据融合方面具有独特的优势,能将相互交叉的不确定数据信息合理地分配到多模式中,能够有效地合成不同传感器得到的数据信息,从而得到一个更为可信的结果。因此,运用D-S证据理论解决无人机数据链故障诊断中的不确定性问题。
在应用D-S证据理论进行故障诊断时需解决基本概率赋值函数获取、冲突证据合成和决策规则制定等问题。其中,基本概率分配函数是证据理论诊断的前提和基础,合成规则是推理的核心,而决策规则是诊断的关键。为此,基于无人机数据链路的特点,对基于D-S证据理论故障诊断关键问题进行了研究。
2.1 基本概率分配函数获取
只有获取了基本概率分配函数才能得到信任函数、似然函数进而进行合成、决策判断,所以应用D-S证据理论时需要首先获取基本概率分配函数。目前,基本概率分配函数获取方法有基于近邻距离的方法、基于智能知识的方法和基于语义量化的方法[5,6]。
基于近邻距离的方法把研究的问题看作是一个分类的问题,识别框架Θ是类的集合,各类的典型样本数据为 Xi(k),i=1,2,…,n,n 为识别框架中类的数目。对于一个新的数据Xj(k),它属于某类的基本概率分配函数取决于新数据与已知的各类样本数据之间的距离。根据“距离”的不同,又可以分为信息熵贴近度、灰度关联法和模板匹配法[5-7]。信息熵贴近度的方法需要已知信息熵,计算出信息熵之间的距离,然后根据距离计算出两者的贴近度,最后对贴近度进行归一化即得到基本概率分配函数,这种方法需要选择合适的信息熵,计算量较大;灰度关联法是基于数据序列之间的关联度得出基本概率分配函数,需要建立各类的标准数据序列,首先计算出新数据与各类数据的关联度,然后对关联度归一化即得到基本概率分配函数,这种方法计算量也比较大;相比较而言,模板匹配法是基于欧式距离得出基本概率分配函数,方法简单,计算适中,是获取2个事物接近程度的最传统、最直接的方法,能更好地反映待测数据的属性。
综上所述,考虑到无人机数据链的故障样本数据较少,对诊断时间要求较短,选用模板匹配法解决基本概率获取的问题,其步骤如下:
①计算Xi(k)与Xj(k)之间的距离:

②计算Xi(k)与Xj(k)之间的匹配度:
③对匹配度进行归一化得到基本概率分配函数:
2.2 基于冲突度和重要度的冲突证据合成
在D-S合成规则中,当K→1时表明合成的证据高度冲突,此时利用D-S合成规则合成会出现有悖常理的结果,这样的证据就称为冲突证据。解决该问题的方法主要有3种:修改合成规则的方法[8]、修改证据源的方法[9]以及同时修改证据源和合成规则的方法[10]。从无人机数据链路诊断的角度考虑,改进的合成方法都增加了许多计算量,降低了诊断速度和效率,由于修改证据源的方法比修改合成规则方法计算量小,所以选择基于修改证据源的方法对合成进行改进。
2.2.1 冲突度
通常用传统合成规则中K来衡量证据的冲突,但是没有定量分析K,没有一个具体的判断标准。K既跟组合的证据数目有关又和证据的维数有关,当组合的证据数目增加时,K会变大,当证据中的维数变大时,K也会变大。因此在利用K衡量证据间的冲突时需要根据不同的证据组合数和组合证据的维数设置不同的判决值。当证据中各个元素的基本概率值都相等时,合成结果跟融合前的证据相同,没有发生信任聚焦,此时可以看作D-S合成规则失效,本文将合成规则失效时的冲突度K设置成判决冲突的阀值,当2条证据的合成冲突K大于或等于此阀值时,视为2条证据有冲突,否则就认为2条证据一致。
2.2.2 重要度
在实际应用证据理论进行诊断决策时,不是所有的证据都具有相等的重要度,传统D-S合成规则没有考虑各证据对决策的重要度。因为相同的证据对不同的故障模式具有不同的重要度,所以在利用多证据融合诊断时一定要考虑证据的重要度。运用重要度修改证据源的步骤如下:
①建立贡献度矩阵V*,它表示证据和故障之间的关系。其中,0 ≤ vi,j≤ 1,i=1,2,…,m ,j=1,2,…,n,m为证据数目,n为故障模式总数,它表示证据i对故障j的贡献度;,它说明所有证据对故障j′的贡献度总和为1。
②利用证据的贡献度构建证据的重要度,证据i对故障j的重要度wi,j可表示为:

③利用证据的重要度修改证据源mi(A),得到新的证据源m′i(A),如式(2)所示。

2.2.3 冲突证据合成
首先,根据两两证据间的冲突度K和阀值将证据分为一致证据组和冲突证据组,设证据i与其他证据之间的冲突度为 kj,j=1,2,…,m且j≠i,冲突度的阀值 ε由表1所得,冲突度较大的为 kj′,j′=0,1,…,l且 k≥ ε ,如果 l≥,那么就将j′证据i归为冲突证据组中,否则就将证据i归为一致证据组中。
其次,根据式(2)分别对一致证据组和冲突证据组进行修改,得到新的一致证据组和冲突证据组,然后再运用D-S合成规则分别对2组证据进行融合运算,得到2个融合后的证据,最后计算2个证据的冲突度K,如果K≥ε就用式(3)进行融合运算,否则仍用D-S合成规则进行融合运算。
2.3 基于基本概率分配函数的决策
选用基于基本概率分配函数进行决策判断。该决策规则如下:
设∃A1,A2⊂Θ,满足:m(A1)=max{m(Ai),Ai⊂Θ},且 m(A2)=max{m(Ai),Ai⊂ Θ且Ai≠A1}。
若有
则选择A1为判决结果,ε1、ε2是决策阀值。
2.4 故障诊断方法
通过上述分析,基于D-S证据理论的无人机数据链故障诊断方法的步骤如下:
①确定故障空间。根据无人机数据链故障履历表,统计发生过的故障情况,对这些情况按照其原因和特点分为若干典型故障类型,最后,由这些故障类型构成故障空间。
②构造识别框架。根据故障空间构造识别框架,即诊断对象运行状态的命题集合。
③确定故障征兆空间。利用无人机数据链特征信息,结合故障空间中各故障类型特点,构造各种故障特征子集,进而构成整个故障征兆空间。
④选择证据体。利用故障特征子集,结合识别框架中各命题的特点,构造从不同侧面能够识别无人机数据链运行状态的证据体。
⑤确定各证据体的基本概率分配函数。在深入分析各证据与识别框架中各命题对应关系的基础之上,采用2.1节介绍的方法获取各证据对识别框架中各命题的支持程度,即基本概率分配。
⑥合成运算处理。利用2.2节给出的改进合成算法,计算出各证据联合作用下的识别框架中各命题的基本概率分配值。
⑦得出诊断结论。利用2.3节介绍的决策规则,对识别框架中各命题进行诊断分析,最终得出诊断结论。
3 诊断实例
为验证所提方法的正确性,以典型无人机数据链系统[2,3]为对象进行诊断和分析。建立无人机数据链常见故障现象如表1所示。
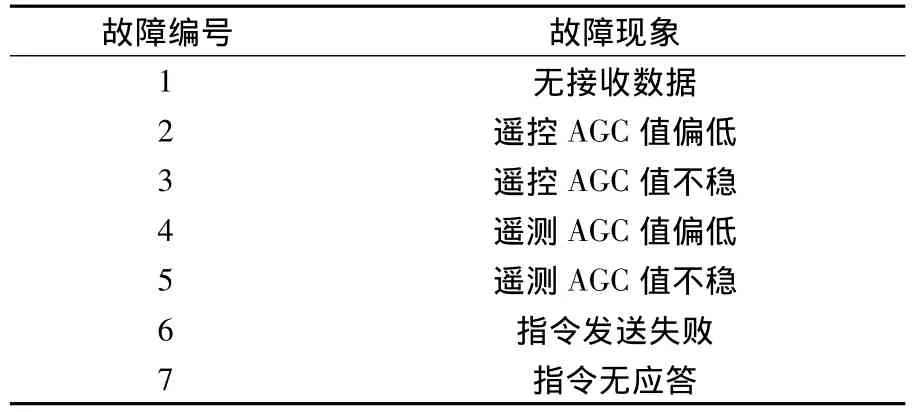
表1 无人机数据链常见故障现象
根据上述无人机数据链组成结构,选择地面发射系统故障F1、地面接收系统故障F2、地面天线故障F3、机载发射系统故障 F4、机载接收系统故障F5、机载天线故障F6为识别框架,预先设置数据链发射系统中功放电路板故障,然后进行诊断分析。
3.1 系统级故障诊断
首先得到的故障现象是遥控AGC值偏低和遥控AGC不稳,对应故障现象集中的2和3。故障现象2和3对应的故障分系统的基本概率分配值以及融合处理后的基本概率分配值如表2所示。
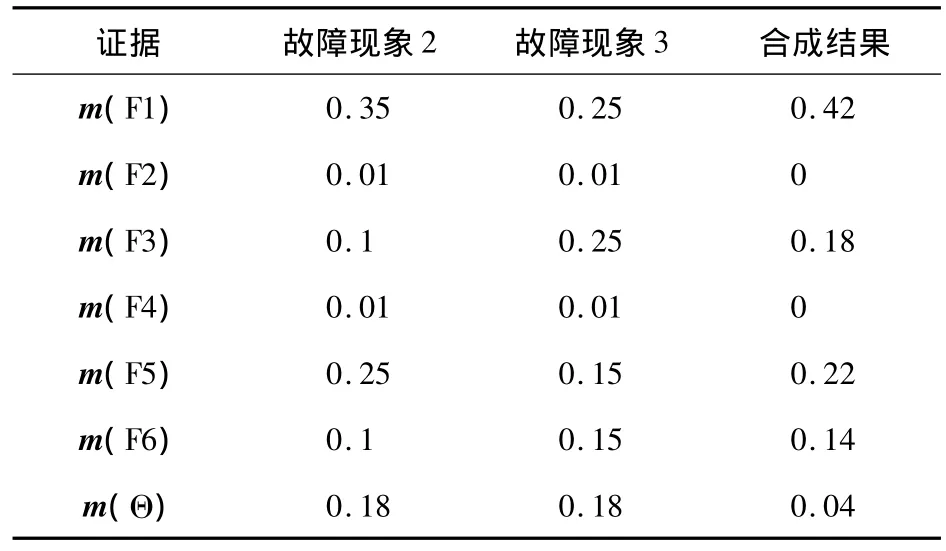
表2 系统级故障诊断的基本概率分配
根据表2结果,得到故障诊断的结论是F1,即系统级故障诊断的结果是地面发射系统故障。
3.2 电路板级故障诊断
为进行发射系统故障诊断,选择系统正常F7、电源板故障F8、锁相单元故障F9、振荡器故障F10、参考源故障F11、衰减器故障F12、功放故障F13作为发射系统故障诊断的识别框架。根据系统级故障诊断结果,利用相应的检测仪器对频率J、载波Z、输出功率W、调制性能T、输出频谱S等性能指标进行检测,得到测试数据,运用模板匹配法得到基本概率分配值,最后利用改进合成规则进行合成处理的结果如表3所示。
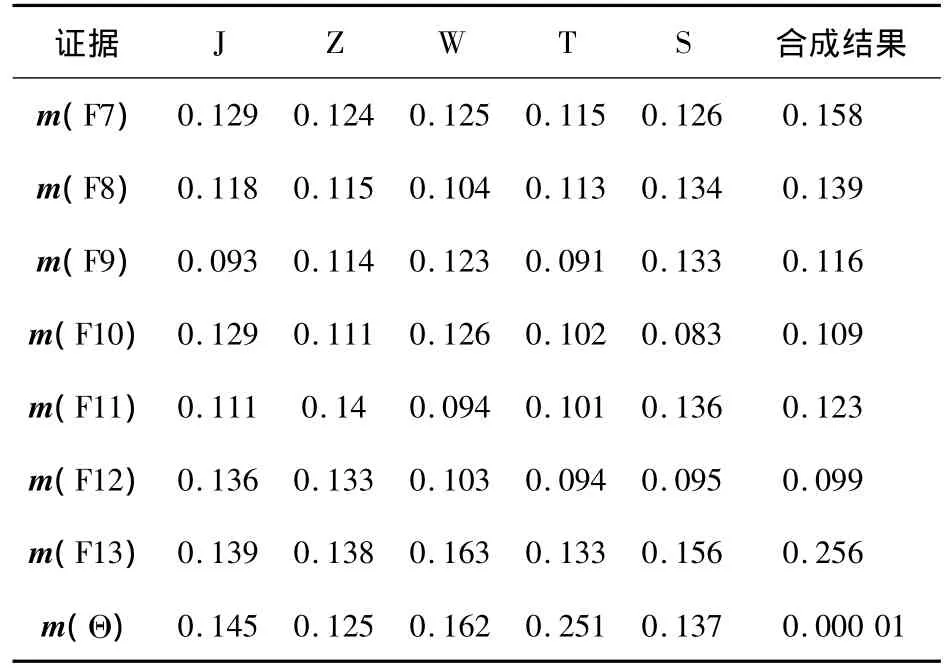
表3 电路板级故障诊断结果
根据表3结果可知,故障原因为F13,即功放故障,这就表明诊断结果与预先设置故障完全一致,从而验证了本文所提方法的正确性和有效性。
4 结束语
上述提出了一种基于D-S证据理论的无人机数据链路故障诊断方法,设计系统级和电路板级两2层诊断框架,通过模版匹配法进行基本概率分配函数获取,基于冲突度和重要度进行冲突证据合成,采用基本概率分配函数进行决策,由此形成的基于D-S证据理论的诊断方法有效解决了复杂无人机数据链的故障诊断问题,为增强无人机数据链的可靠性和维修性提供了新的手段。
[1]陈占海,祝小平.无人作战飞机数据链延时对攻击决策的影响及其补偿[J].科学技术与工程,2011,11(9):2 043-2 047.
[2]刘 敏.无人机数据链自动测试系统研究[D].西安:西北工业大学硕士学位论文,2003:10-15.
[3]麻远扬,胡永红.无人机无线电数据链接收链路自动测试系统设计[J].计算机测量与控制,2007,15(9):1 141-1 143.
[4]柯铭铭,路 平,田庆民.基于决策树SVM的某型无人机发射机故障诊断[J].信息技术,2011(2):76-81.
[5]梁发麦,张 静,王国宏.雷达目标识别中获取基本概率 赋 值 的 方 法 [J].火 力 指 挥 与 控 制,2008,33(8):8-11.
[6]张丽莉.基于信息融合的汽油发动机电控系统故障诊断方法研究[D].沈阳:东北林业大学博士学位论文,2009:1-6.
[7]耿俊豹,黄树红.基于信息熵贴近度和证据理论的旋转机械故障诊断方法[J].机械科学与技术,2006,25(6):663-666.
[8]张山鹰,潘 泉,张洪才.证据推理冲突问题研究[J].航空学报,2001,22(4):369 -372.
[9]陈一雷,王俊杰.一种D-S证据推理的改进方法[J].系统仿真学报,2004,16(1):28 -30.
[10]李文立,郭凯红.D-S证据理论合成规则及冲突问题[J].系统工程理论与实践,2010,30(8):1 422-1 432.
猜你喜欢
一重技术(2021年5期)2022-01-18
军民两用技术与产品(2021年10期)2021-03-16
中国交通信息化(2020年7期)2021-01-14
铁道通信信号(2020年9期)2020-02-06
北京航空航天大学学报(2019年9期)2019-10-26
数学大王·趣味逻辑(2019年5期)2019-06-13
小学科学(学生版)(2019年5期)2019-05-21
电子制作(2018年10期)2018-08-04
北京航空航天大学学报(2017年3期)2017-11-23
重庆工商大学学报(自然科学版)(2015年10期)2015-12-28