
微电阻率井径组合仪单电机双驱动推靠器设计
2013-09-18 02:52:30王利宁陈草棠包德洲李玲芝
测井技术 2013年6期
王利宁,陈草棠,包德洲,李玲芝
(中国石油集团测井有限公司,陕西 西安 710077)
0 引言
微电阻率和井径测井仪推靠器技术经历了联动式独立、联动式组合、分动式独立、分动式组合的发展过程,但是,无论是联动式组合还是分动式组合,都是1个电机驱动1组推靠机构工作。分动式组合测井时[1]当极板完成目标测量井段后无法独立收回,导致橡胶极板探测器在井径的全程测量中不必要磨损,同时增加了仪器遇卡风险。为了避免这些不利情况的发生,设计了一种单电机双驱动的微电阻率井径组合测井仪,该仪器不但具有分动式六臂推靠器独立运动的特点,还可以在微球微电极橡胶极板完成目标井段测量后单独收回,减少了极板磨损和遇卡概率。
1 单电机双驱动推靠系统技术构成
随着斜井、水平井的开发和生产效率的提高,对仪器的长度要求越短越好,因此产生了多种形式的组合测井仪。对于带推靠的仪器进行组合,存在的问题通常是1个电机只能对1组连杆机构进行驱动,要完成对2组推靠机构驱动,就需要2个电机。这在一个仪器中很难实现。因此,设计微球微电极井径组合测井仪时,以前面所述的分动式推靠微电极井径组合仪为基础,提出一种设计方案,将需要全井段测井的井径分为1组,将只需要测量部分井段的微球微电极分为1组。第1组为4个测量探头,第2组为2个测量探头,装有6个探头的推靠臂可独立运动[2];排列形式为2组杆系。通过机电结合对它们进行分别控制,当井径测量臂打开,微球微电极推靠臂也能打开,微球微电极推靠臂收拢后,井径测量臂仍处于打开的工作状态,全程测量完成后实现二次闭合,实现单电机双驱动功能。该微电阻率组合测井仪主要由电子线路、推靠系统、电机驱动系统、压力平衡系统组成。
2 双驱动推靠器机构设计
2.1 极板推靠臂受力分析及计算
2组杆系6个测量探头与井壁的接触性能直接影响到该仪器的测井质量,如果作用在探头上的推靠力偏小,极板与井壁接触不好,不能准确测出地层电阻率,井径探头会因泥饼结厚而造成井径测量值偏小。分动式推靠与联动式推靠比较,前者的推靠弹簧无法做得和后者一样大,所以作用在探头上的推靠力偏小。用静力学对推靠杆系进行受力分析,研究推靠力的影响因素[3],通过设计辅助弹簧等方法增加推靠力在合理范围。
2.1.1 取极板为研究对象
图1为极板受力分析图。图1中β是极板在井下工作时某一时刻与仪器轴心的夹角;α为极板引臂与极板的夹角;假设井壁对极板的等效集中载荷p极作用于O3;引臂对极板的作用力F13作用于O2。
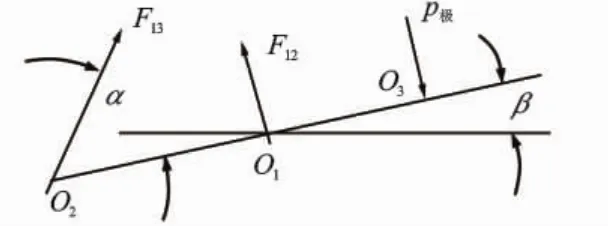
图1 极板受力分析图
平衡方程
由式(2)得,当 α≠90°时,F13=0。
从微球微电极推靠臂运动轨迹中,可知α≠90°必成立。即极板臂受力F13=0。
由式(3)得

由式(1)得

由式(4)、式(5)得,井壁对极板的等效集中载荷p极的作用点为O1,大小等于推靠臂对极板的作用力F12。
2.1.2 取极板臂为研究对象
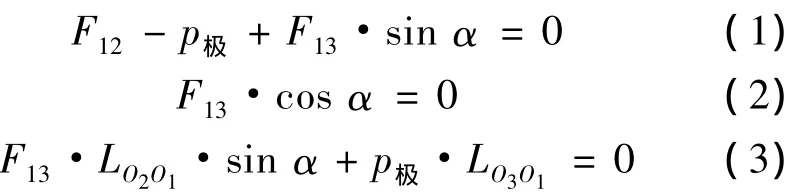
图2为极板臂受力分析图。假设β=0,建立p与F的函数关系。
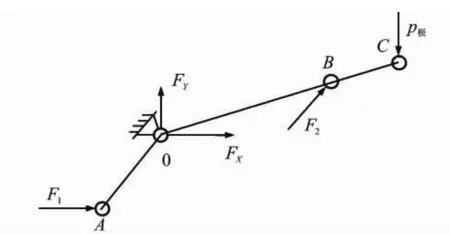
图2 极板臂受力分析图
列平衡方程式,对O点取矩

式中,F1为弹簧JB的弹簧力;F2为辅助弹簧JBF的弹簧力(见图3);FX和 FY为极板臂与仪器本体固定铰链联接点O处的约束力;λ为不同井径条件下极板臂在X、Y方向受力角度变化的关联系数。
由式(6)可知弹簧力与极板对井壁的推靠力成正比。在OC长度一定的情况下,OA、OB越长,极板对井壁的推靠力就越大。所以在有限的空间进行推靠器设计时,首先要考虑如何能增加弹簧力,在仪器外径一定的情况下,尽可能加长OA尺寸,辅助弹簧杆与极板臂的连接点B距C点取最小值。井径测量杆受力分析及推靠力计算与推靠臂类同。
2.2 双驱动机构设计
常规情况下,1个动力源可完成对1组机构的驱动。但是,受井下空间限制,微球微电极和井径2组杆系只能共用1个电机。要用1个电机驱动2组机构分别动作,是该仪器的设计难点之一。为了实现1个电机对2组杆系的驱动,设计了2个电路回路及控制杆系分别动作的行程开关G、行程开关D、行程开关E。在结构上设计有与井径臂相连接的滑块H及和极板臂相连接的滑块K,电机的驱动点放在滑块H上,滑块H的移动会推动滑块K运动,利用拉簧、压簧的贮存能量特性通过它们的变形协助完成2组杆系的分时动作(见图3)。

图3 推靠系统示意图
分动式推靠的驱动方式是电机通过中心推力杆驱动承力盘压缩或释放与各臂相联的弹簧而带动各推靠臂打开或收拢。但是,该仪器需要驱动2组机构分别动作,若选分动式推靠的驱动方式,受本身结构限制无法实施,因此,选用了联动式推靠的驱动方式(见图3)。电机通过推力杆带动仪器外壳上的推力板前后运动,驱动滑块H带动各臂打开或收拢。选用联动式驱动方式的主要特点:①仪器中心位置去掉了中心推力杆,内部空间增大,使弹簧JB、弹簧JJ直径设计尺寸增大,弹簧力增大;②弹簧JB、弹簧JJ在径向分布的分度圆直径变小,杆件中OA尺寸加长。另外,弹簧选用高强度耐高温不锈钢新型材料MP35N替代传统材料60Si2Mn和1Cr18Ni9Ti,使弹簧刚度增大,提高推靠力[4]。最终井径推靠力120 N,极板推靠力220 N,满足设计要求。
活塞杆与井径电位器连接的一端位于由密封圈密封的仪器内部,压力为0.1 MPa,活塞杆与井径测量臂连接的另一端在井下泥浆中,内外压力不平衡,采用给仪器内部注入硅油的方法实现内外压平衡,选用橡胶胶囊作为压力平衡的补偿装置[5],保证活塞杆运动自如。电机推力杆的压力平衡是通过在推力杆端面设计压力平衡帽挡住井下压力。
2.3 推靠器控制电路
为了实现微球微电极先于井径独立收拢,井径完成全程测量后实现二次闭合,设计推靠器控制电路。在控制电路中,有2个电路回路控制3组行程开关。使2组测量头同时打开,并分别闭合。图4为推靠控制电路框图。它主要由4个继电器及整流桥组成,由地面供电面板通过缆芯2、10供辅交流,通过继电器保护电路,该电路的作用是推靠器在推、收状态时供电回路通过继电器与信号电路断开。交流电压经整流电路输出带极性的直流电压MT+、MT-;再经推靠控制电路控制行程开关的关闭,最终控制几组推靠臂的推开与收拢。
3 应用效果
当仪器通过电缆下放到井中测量段,中接头U、S之间加正向直流电压(见图4),电机带动丝杠正转,通过推力杆拉动推力板及滑块H向右运动使井径4个测量臂打开。滑块H推动滑块K继续向右运动,拉簧被拉伸,使微球微电极推靠臂打开。行程开关E动作,电机断电(见图3)。测井时,6个臂随井眼的大小打开或收拢并释放或压缩弹簧JB、弹簧JJ、辅助弹簧JBF、辅助弹簧JJF。同时井径4个测量臂随井眼变化带动4个活塞杆左右移动使恒流供电的井径电位器电阻值发生变化并以直流电压信号传输给地面控制系统。微球微电极完成测井工作后,中接头U、S之间加反向直流电压,电机反转,推力板带动滑块H,压簧推动滑块K向左运动,微球微电极2个推靠臂收拢,中间行程开关D动作,电机断电。井径测量结束后,中接头U、R之间加直流电,电机通过另一个电路回路推动滑块H继续向左运动,滑块H和滑块K分离,井径测量臂收拢,行程开关G动作,电机断电。
实际测井表明,该仪器推靠力选择合理,在满足测井质量的同时,微球极板的使用寿命是偏心式微球测井仪极板的2~3倍;微球微电极极板可单独收回,使其寿命是老式的微电极井径组合仪极板的3~4倍。
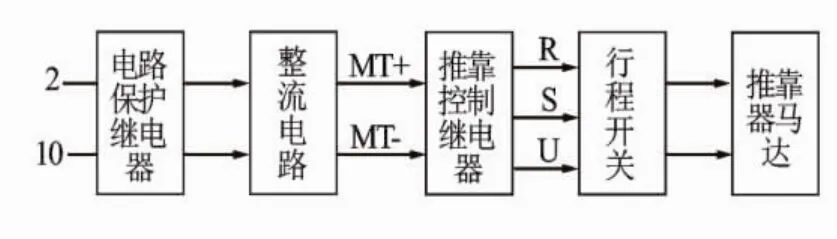
图4 推靠控制电路框图
4 结论
(1)新的优化设计由于使微球微电极井径组合测井仪获得良好的性能和测量效果。将推靠力增加到合理范围,既保证极板和井径探头不会加快磨损,同时使井径探头和极板均能紧贴井壁,减少了泥浆对橡胶极板探测器的测量结果的影响。
(2)设计单电机双驱动和运用2个电路回路控制3组行程开关,使极板完成测量目的井段后可以单独收回,减少了极板磨损和遇卡概率。四臂井径全程测量完成后二次闭合,缩短了仪器串的长度,一次测井作业可同时完成微球、微电位、微梯度、井径的测量,提高了生产效率。
[1]丁世村.分动式推靠微电极井径组合仪的设计和应用[J].测井技术,2003,27(增刊):62-64.
[2]王宏伟.微球微电极井径组合电路短节技术研究[D].长春:吉林大学,2009.
[3]谢刚.工程力学[M].沈阳:东北大学出版社,2001.
[4]徐灏.机械设计手册[M].北京:机械工业出版社,1991.
[5]赵旻昕.石油测井仪器的耐高压设计[J].石油仪器,2009,23(2):12-14.
猜你喜欢
石油管材与仪器(2020年5期)2020-11-05 02:36:06
电脑知识与技术(2018年33期)2018-12-22 10:55:48
测井技术(2017年4期)2017-03-24 12:55:39
中学生数理化·高二版(2016年10期)2016-12-24 11:26:42
锻压装备与制造技术(2016年3期)2016-06-05 09:36:12
电子器件(2015年5期)2015-12-29 08:42:31
机械制造(2015年5期)2015-06-12 01:57:36
电源技术(2015年9期)2015-06-05 09:36:06
中国煤层气(2014年5期)2014-08-07 06:58:33
食品科学(2013年6期)2013-03-11 18:20:07
