变速恒频轴带发电机组监控系统的研制
2013-09-15 09:21:28洪鹏鹏南余荣石健将
机电工程 2013年4期
洪鹏鹏,南余荣*,石健将
(1.浙江工业大学 信息工程学院,浙江 杭州 310023;2.浙江大学 电气工程学院,浙江 杭州 310027)
0 引 言
在传统混合推进系统中,主柴油发电机通过变速箱轴系直接驱动螺旋桨,同时拖动轴带发电机发电[1-2]。为保证船舶电力系统中电压和频率的稳定,主柴油机的转速必须保持恒定,从而降低了推进系统的效率和性能。
变速恒频轴带发电机组系统是指:在传统轴带发电机和船舶电力系统之间添加输出电压和频率可控的电力电子变流器装置。研究者采用变速恒频轴带发电机组系统的新型混合推进系统,将机械推进和电力推进有机结合在一起,从而使主柴油机和轴带发电机可以分别单独驱动螺旋桨,或者同时驱动螺旋桨,以适应不同工况下的系统需求[3-5]。新型混合推进系统保证可以在保持电力系统电压与频率恒定条件下灵活地调节主柴油机的转速,从而提高推进系统的效率和整体性能。
变速恒频变流器是新型混合推进系统的核心控制设备,而监控系统则是工程人员监控推进系统中电机、变流器等各种设备的运行状况并对其进行有效控制的关键设备之一[6-10]。
本研究首先介绍变速恒频轴带发电机组系统的架构及其工作模式,接着讨论该系统中基于CAN总线的监控系统的研制。
1 系统架构及其工作模式分析
1.1 系统架构
变速恒频轴带发电机组系统的一个突出优点是可以实现能量的双向流动,新型混合推进系统能流图如图1所示。
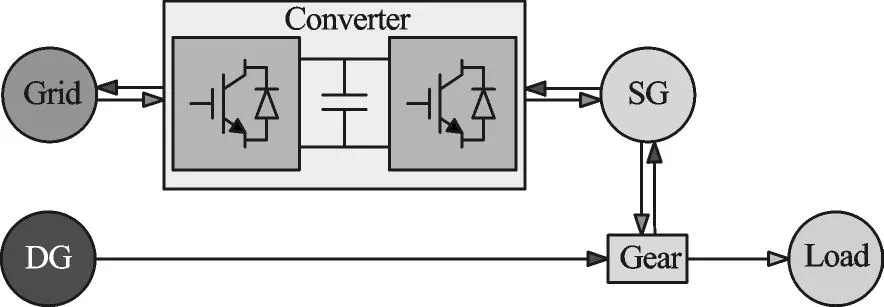
图1 新型混合推进系统能流图
主柴油发电机(Diesel Generator,DG)为推进系统提供主要的动力,Load为螺旋桨负载,柴油发电机、轴带发电机(Shaft Generator,SG)和螺旋桨负载通过变速箱(Gear)轴系连在一起。Grid为辅助发电机组构成的船舶微电网系统。微电网与轴带发电机之间的变流器(Converter)采用背靠背变流器拓扑结构,由两个三相全桥变流器组成,以实现系统要求的“轴带发电机能够工作在发电和电动两种状态”,从而实现能量的双向流动。
1.2 工作模式分析
变速恒频轴带发电机组系统可以增大柴油机和螺旋桨的调速范围,提高系统效率,有效地解决了船舶短时间内工况多变和输出较大功率的需求。该系统主要有以下4种运行工作模式:
(1)联合推进模式。当船舶全速前进时,能量从微电网流向轴带发电机,能流图如图2所示。此时轴带发电机在电动状态下运行,与主柴油机一起通过变速箱拖动螺旋桨运转,在该模式下系统可以获得最大的输出功率。
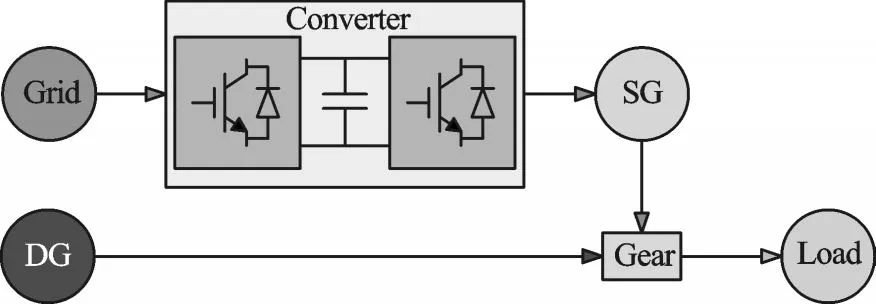
图2 联合推进模式能流图
(2)单独推进模式。当船舶低速航行或者在港口等待时,系统关闭主柴油机,能量从微电网流向轴带发电机,能流图如图3所示。此时,轴带发电机工作在电动状态、单独拖动螺旋桨旋转。这种模式可以减少主柴油机的运行时间,延长主柴油机的寿命,并且减少废气排放。
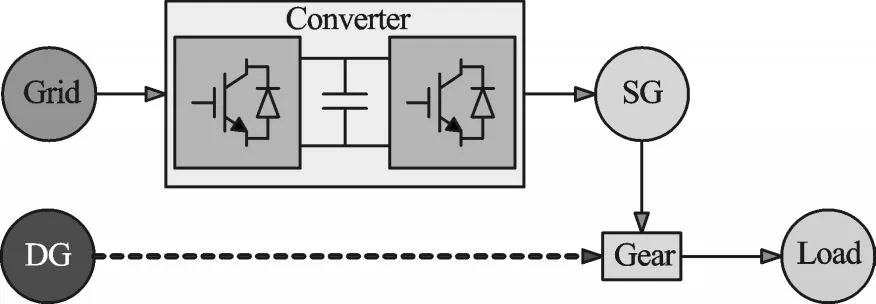
图3 单独推进模式能流图
(3)发电模式。当船舶恒速或常速航行时,主柴油机通过变速箱轴系拖动螺旋桨,同时拖动轴带发电机发电,实现与船舶微电网并网运行,能流图如图4所示。轴带发电机发出的电能经变流器恒压与恒频处理后并入微电网,因此微电网电压和频率不受主柴油机的转速变化影响,可以实现系统在给定速度下效率最高。
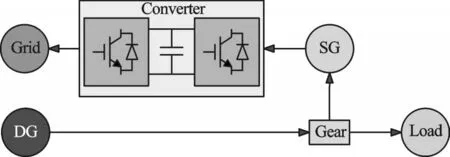
图4 发电模式能流图
(4)空转模式。在该模式下变流器断开与轴带发电机的连接,柴油发电机单独推动螺旋桨,并拖动轴带发电机空转,能流图如图5所示。
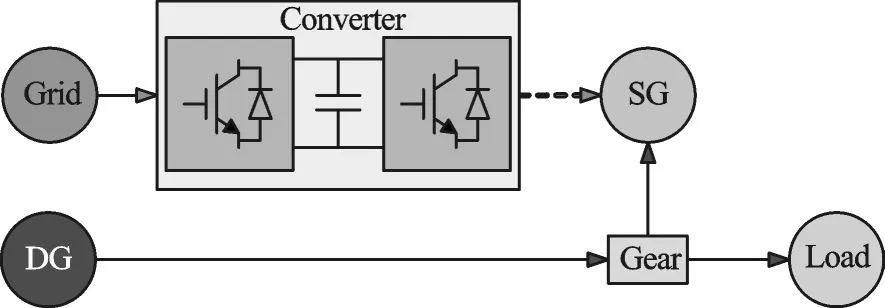
图5 空转模式能流图
2 监控系统设计
监控系统通过CAN总线通信实现对现场设备的运行状态监测、参数采集处理、工作模式切换以及报警等功能,并通过Profibus总线与推进系统的上位机通信,完成现场设备的状态参数上传和指令接收。
2.1 硬件设计
由于变速恒频轴带发电机组系统现场设备复杂,需要采集、显示和管理的参数较多,本研究设计的监控系统硬件结构原理框图如图6所示。
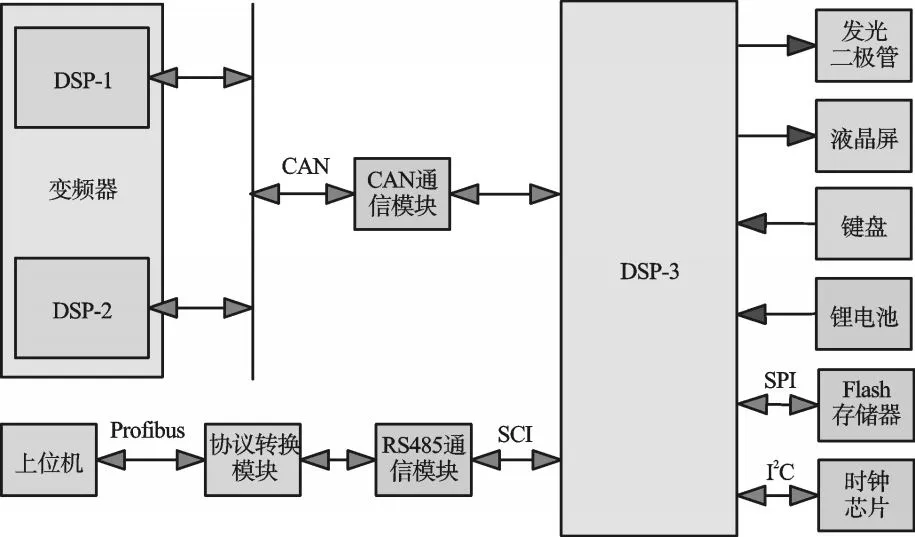
图6 监控系统硬件原理框图
为满足系统控制要求,控制芯片统一采用TI公司的DSP芯片TMS320F28335。28335的主频可达150 MHz,采用哈佛流水线结构,能够快速执行中断响应。同时集成了浮点运算单元,运算精度高,可用C/C++语言实现复杂的数学算法,并且集成了增强型的通用外设接口,包括CAN、SCI、SPI、I2C等通信接口,可方便地实现与其他集成芯片之间的通信。
液晶模块采用5 V供电,分辨率为320×240,可以同时显示数字、字母、汉字、图像等内容。驱动芯片为RAi0公司的RA8835P3N,该芯片采用8位并行数据接口。由于显示模块对速度的要求并不太高,为了减少DSP接口使用量,数据由一个DSP通用I/O口串行输出,然后经过HCF4094BM1转换为并行数据传递给液晶模块进行处理。
由于变速恒频轴带发电机组是新型混合推进系统的核心部分,系统的各种参数及故障历史的保存对于系统的工况检查、故障维护有着至关重要的作用,本研究采用16 Mbit的Flash存储芯片AT26DF161A来保存系统的基本参数、历史故障以及液晶屏显示字库等数据。AT26DF161A的通信接口采用SPI接口,供电电压范围为2.7 V~3.6 V,可采用DSP的I/O口供电电压3.3 V,因此可以直接与DSP的SPI模块进行数据通信,不需要电平转换。该芯片支持块数据擦除,擦除4 KB的时间仅需50 ms,记录一个Byte的时间仅为7 μs,能够实现数据的快速读取和写入,从而提高了系统的实时性。
时钟显示是液晶显示中最基本的功能,不仅能在线显示时间,而且有利于故障记录的保存和调取。监控系统采用常用的时钟芯片DS1302Z,其供电电压范围为2.0 V~5.5 V。为了保证时钟芯片的正常供电,时钟芯片采用监控板上的5 V供电和锂电池3 V供电两路供电回路,这样可以保证系统断电时DS1302Z的也能正常工作。DSP通过一路ADC来检测锂电池的电量,当锂电池电量不足时,系统通过液晶显示模块给出报警信息,提醒用户更换电池。
外接键盘采用包括上、下、左、右、进入、退出6个按键的薄膜面板,可以很方便地实现参数设置、命令输入、菜单切换等功能。薄膜面板可以直接覆盖到液晶模块上面,操作简单方便。
与一般的通信总线相比,采用CAN总线的数据通信具有突出的可靠性、实时性和灵活性,因此监控系统与变频器间的通信采用CAN总线。由于DSP芯片内部集成了CAN通信模块,本研究只需添加CAN总线数据收发器即可与CAN总线网络上其他设备进行通信。CAN数据收发器采用TJA1050,符合ISO 11898标准,而且不上电时总线呈现无源特性。
上位机网络通信采用Profibus通信协议,为了实现监控系统和上位机之间的通信,本研究利用DSP的SCI接口连接一个协议转换模块,然后接入上位机通信网络,SCI通信芯片采用常用的MAX485通信芯片。
2.2 软件设计
监控系统需要对现场控制系统的各种运行参数以及各个设备的状态进行实时采集和显示,并对异常状态进行报警和处理。系统菜单设计采用模块化设计,以便于编程和调用。主程序及中断子程序流程图如图7所示。
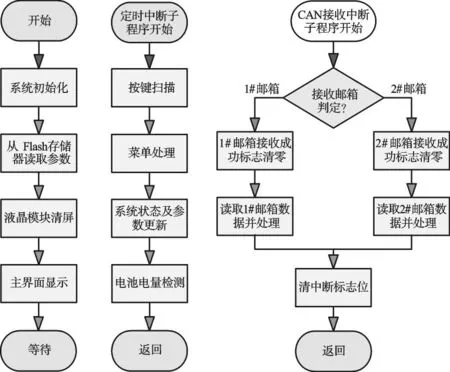
图7 主程序及中断子程序流程图
系统初始化包括DSP的系统时钟、中断、定时器模块、CAN模块、SCI模块、SPI模块及通用I/O口的初始化、时钟芯片初始化、液晶模块初始化等内容。
主界面显示是系统正常工作状态的界面,显示内容包括各个设备运行状态、主要的运行参数、实时时间等内容。
按键扫描和菜单处理主要是对系统界面上的相关命令进行操作,包括系统运行模式切换、系统起动、系统停机、系统复位、详细运行参数显示、参数设置、故障显示、故障历史记录查询等内容。
系统状态及参数更新包括系统设备状态、运行参数、时间的实时更新,对新设置的参数、系统故障等数据的保存等内容。
电池电量检测主要对锂电池的电量进行A/D采样计算,当电池电量低于2.2 V时,系统给出报警信号,在主界面上显示电池闪烁图标,提醒用户更换电池。
由于系统主回路控制部分采用背靠背结构的三相全桥变流器分别由两块DSP芯片控制,为保证数据通信的稳定性,监控板配置1#邮箱接收电机侧变流器控制芯片DSP-1发送的数据,2#邮箱接收电网侧变流器控制芯片DSP-2发送的数据,在CAN接收中断子程序中实现数据的接收和处理。
3 结束语
本研究基于变速恒频轴带发电机组系统设计的监控系统,不但可以实现对系统运行状态和参数的实时显示,而且可以设置系统工作参数、切换工作模式,在故障状态下实现报警和紧急保护。
该监控系统接口电路小巧方便,节省空间,界面交互性好,便于安装和调试,同时模块化的软件设计方法也提高了代码的可读性、可靠性和可维护性。
致 谢
本研究在完成的过程中得到了南余荣教授和石健将副教授的悉心指导,在实验平台的搭建过程中得到了师兄张平博士和师弟李荣贵的大力支持,在此表示深深的谢意。
(References):
[1]APSLEY J M,GONZALEZ-VILLASENOR A,BARNES M,et al.Propulsion drive models for full electric marine pro⁃pulsion systems[J].IEEE Transactions on Industry Ap⁃plications,2009,45(2):676-684.
[2]PENG L,LI Y D,CHAI J Y,et al.Vector Control Of A Doubly Fed Induction Generator for Stand-alone Ship Shaft Generator Systems[C]//International Conference on Electri⁃cal Machines and Systems.Seoul:[s.n.],2007:1033-1036.
[3]AHARON I,KUPERMAN A.Topological Overview of Pow⁃ertrains for Battery-Powered Vehicles With Range Extend⁃ers[J].IEEE Transactions on Power Electronics,2011,26(3):868-876.
[4]LIU Yi-jian,XUE Shi-long.ControlStrategy ofthe Shaft-driven Generator Based on the PWM Converters[C]//2011 16th International Conference on Methods and Mod⁃els in Automation and Robotics.Miedzyzdroje:[s.n.],2011:178-181.
[5]PINNEKAMP B,HOPPE F,HEGER M,et al.Combined marine propulsion systems:optimization and validation by simulation[EB/OL].[2012-10-17].http://www.agma.org/assets/uploads/publications/12FTM08_Pinnekamp.pdf.
[6]李 明,黎 菁,段 征.船舶混合动力系统的研究[J].柴油机,2012,34(3):26-32.
[7]徐 靖,孙聚川.船舶综合信息管理平台标准化技术研究[J].上海造船,2011(4):50-52.
[8]王付双,刘 赟,张孝双.基于CAN总线和以太网的新型船舶监测报警系统[J].柴油机,2010,32(3):20-23.
[9]张立忠.基于CAN总线的船舶机电设备监控系统的设计与实现[D].大连:大连海事大学自动化与电气工程学院,2010.
[10]沈晓峰.基于CAN和RS 485总线的机舱监测综合报警系统设计[D].南京:南京理工大学电光学院,2012.
猜你喜欢
航海(2023年1期)2023-04-15 15:38:07
机电信息(2021年22期)2021-09-10 10:10:22
装饰装修天地(2019年23期)2019-12-10 09:56:55
造船技术(2019年4期)2019-08-31 08:26:30
科技与创新(2019年1期)2019-02-15 08:08:16
电测与仪表(2017年11期)2017-12-26 01:03:22
电测与仪表(2016年8期)2016-04-15 00:30:16
电测与仪表(2016年8期)2016-04-15 00:30:06
通信电源技术(2016年4期)2016-04-04 02:57:12
通信电源技术(2016年5期)2016-03-22 01:09:50