
工程机械典型液压容积调速系统的应用及控制要点
2013-09-13 02:30张传娟
电子测试 2013年17期
张传娟
(江苏联合职业技术学院徐州经贸分院,江苏 徐州 221004)
0 引言
液压传动技术以其优越的传动平稳性、良好的调速性以及较大的功率体积比等优点在工程机械中运用广泛。由于节流调速始终存在较大的溢流损失和节流损失,造成系统的效率低,发热大,不适合工程机械的大功率场合。而容积调速没有溢流损失和节流损失,效率高,发热少,因而在工程的行走系统,提升系统等子系统中应用广泛。本文以工程机械中常用的斜盘变量泵A11V和斜轴变量马达A6V的容积调速搭配方式为例,分析其动态特性,并在此基础上,研究调速控制策略。
1 工程机械液压容积调速系统的控制要点
容积调速利用变量机构的位置控制作用改变泵或马达的排量来调节执行机构的运动速度,一般采用变量泵控制定量马达的调速方式。为了提高系统运行效率,拓宽轻载工况下的速度上限,可以采用变量泵和变量马达组合的调速方式,工程机械中典型搭配A11V泵和A6V马达就是采用这种方式。
1.1 A11V斜盘变量泵的控制要点
国内外的A11V系列泵的变量机构有多种控制方式可供选择,概况起来包括压力控制,流量控制和功率控制,同时,这三种控制方式还可以相互叠加,共同组成复杂的、多种功能的变量控制方式。一般来讲,压力控制和功率控制的变量方式需要通过阀控实现系统调速,而流量控制方式在发动机转速不变的情况下,直接调节泵的排量来实现系统调速。图1是带比例电磁铁的电控变量泵结构原理图,电磁力直接作用于控制活塞的阀芯上,控制活塞和变量缸之间通过反馈弹簧组成位移-力反馈环节,共同控制泵的排量变化,而泵的排量和外部控制电流大小成正比。稳态控制特性曲线如图2所示。值得一提的是,泵的初始排量在上压前处于较大排量的某个值(通常情况下,并非最大值),为了在控制起点将泵的排量摆回最小排量,需要施加30bar的控制压力,所需控制控制压力可从负载压力或外部油口G口获得。
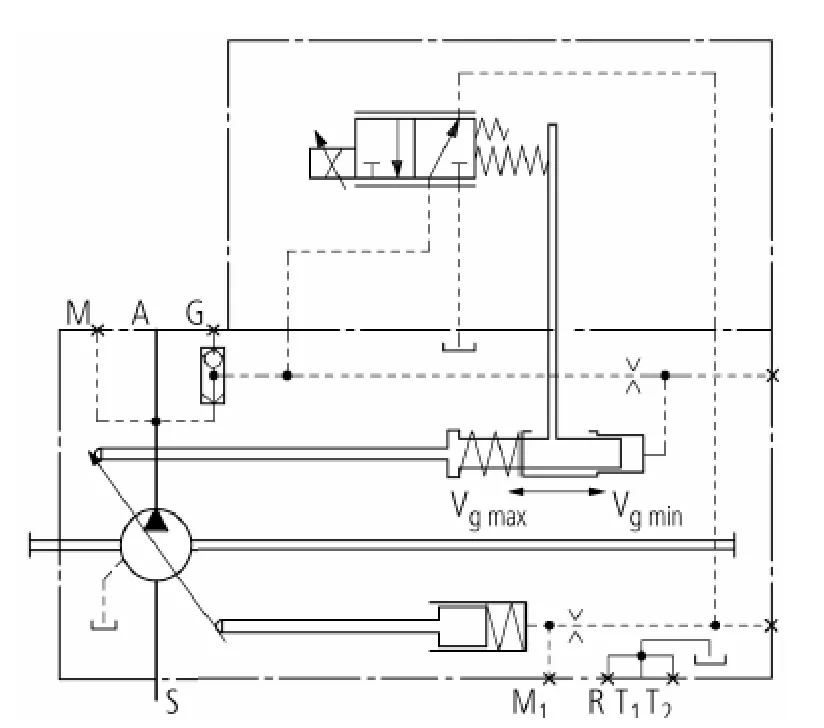
图1 A11V变量泵结构原理
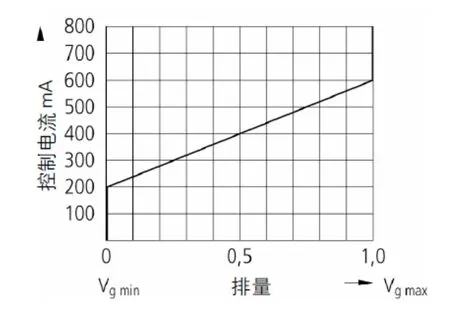
图2 A11V排量控制特性曲线
1.2 A11V斜盘变量泵的控制要点
A6V斜轴变量马达按照变量方式可分为两类,自动变量和外部控制变量(液压控制和电气控制):自动变量是在控制活塞上引入工作压力,当工作压力从控制起点开始增加△p时,马达排量从Vgmin增加到Vgmax;而外部控制变量的标准配置是控制起点位于Vgmax,控制终点位于Vgmin,通过外部信号控制排量变化。图3所示即为电控变量马达的结构图,其排量控制特性曲线如图4所示,变量过程是扭矩减小,转速增加的过程。为了实现在满足动作要求的前提下追求系统运行效率,往往需要压力切断功能。这样,变量过程中当扭矩不足而压力上升到一定值时,压力切断功能启动,马达排量不再随控制信号的增加而增加,从而保证马达输出扭矩满足负载要求。
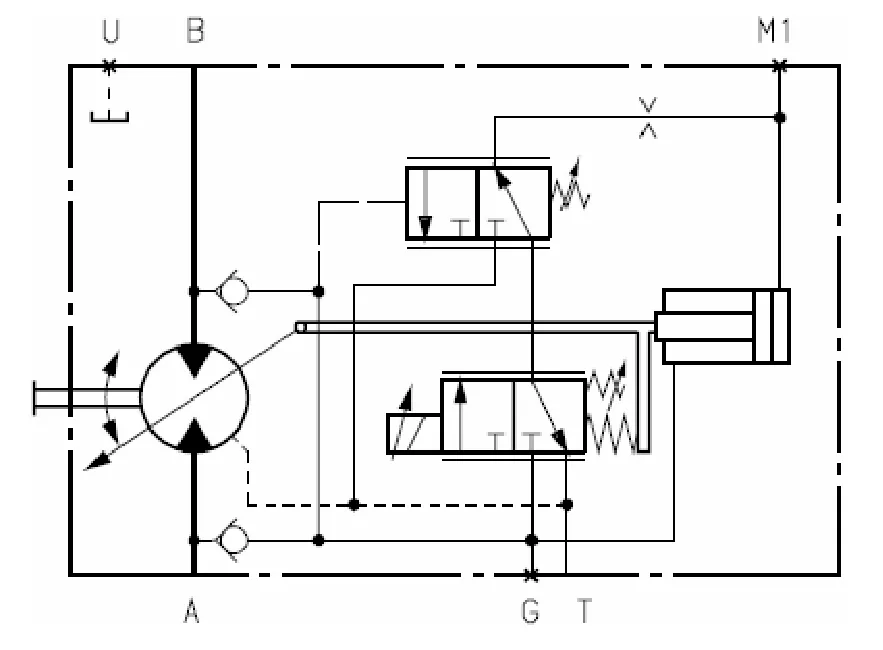
图3 A6V变量马达结构原理
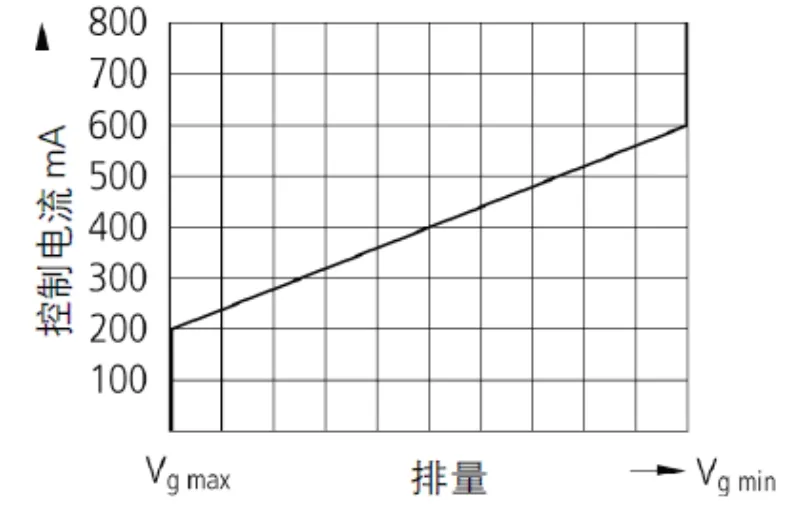
图4 A6V排量控制特性曲线
2 PLC控制的容积调速系统的结构及特点
容积调速系统的速度指令通常由操作手柄给定,手柄位移的改变向变量泵和变量马达的变量控制活塞输入逐渐变化的电信号,而变量活塞的开口变化控制变量缸实现泵和马达改变排量,从而改变液压马达的转速大小和旋转方向。这种控制方式为开环控制,对于对调速性能要求不高的场合,可以基本满足系统要求。但当对调速动态过程和稳态精度提出更高要求时,需要采用闭环控制,控制框图如图5。系统设定速度曲线由PLC程序设定,也可以通
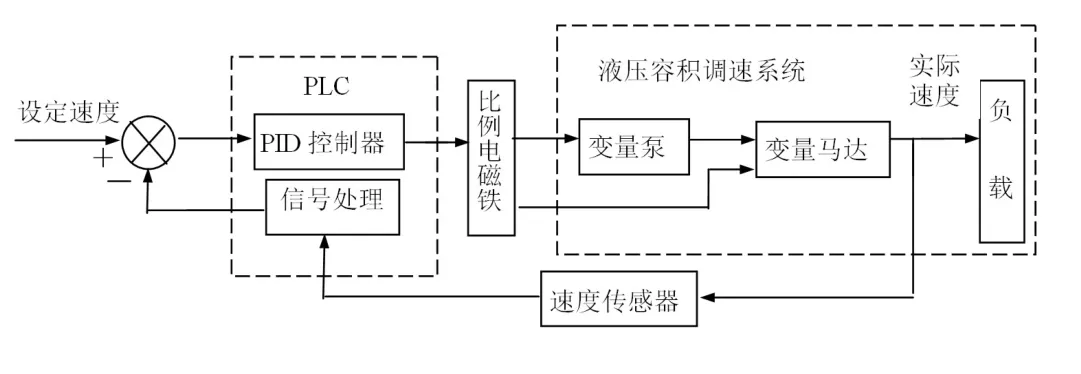
图5 液压容积调速PLC闭环控制原理框图
过触摸屏或外部电位器实时给出。从马达输出轴反馈回来的实际转速信号经处理后和设定信号做差,经PLC的PID控制器后,得到控制量,通过放大器,相应的电流信号作业在变量泵和变量马达的变量机构的比例电磁铁上,从而改变泵、马达排量,进而现速度控制。
PID控制器使用过程控制模块,这种模块的控制程序是厂家设计的,其PID调节的离散公式为:

式中参数是PID运算所需的系统过程变量和PID常量,其意义见表1,每个参数从首地址开始,依次占用双字空间,用户使用时只需要设置这些参数,使用起来非常方便。
由于在整个控制过程中,控制元件都存在较大的死区等非线性因素,液压泵、马达的容积效率也随系统的压力、油液粘度及温度等变化而变化,加之液压油的可压缩性、管路的弹性、液压元件的泄漏等因素,因此为了获得良好的系统动态性能,控制过程值得注意:
(1)泵和马达的控制起点电流为200mA,实际控制中,如果直接以阶跃方式供给200mA,往往会引起系统冲击,不利于系统调速,因此需要通过斜坡延时提供初始电流,以抑制冲击;
(2)马达切断功能起到了安全作用,但同时也使马达排量有了一定的稳定区域,通过控制电流设定马达最小排量时,需要注意Vgmin的设置不要过低,一般为0.6Vgmax;
(3)泵排量增大和马达排量减小都可以增加系统运行速度,而两者同时变量可以缩短系统达到稳态速度的时间,提高运行效率,但为了系统动态性能,泵首先变量,而后马达变量。
3 结论
在工程机械液压系统中,特别是大流量大功率系统中,往往采用液压容积调速的方式。目前,A11V泵和A6V马达的组合方式为各工程机械厂家广泛采用,本文分析了其结构特征和控制要点,并以PLC为控制器,搭建了闭环控制系统框架,为工程运用提供参考。
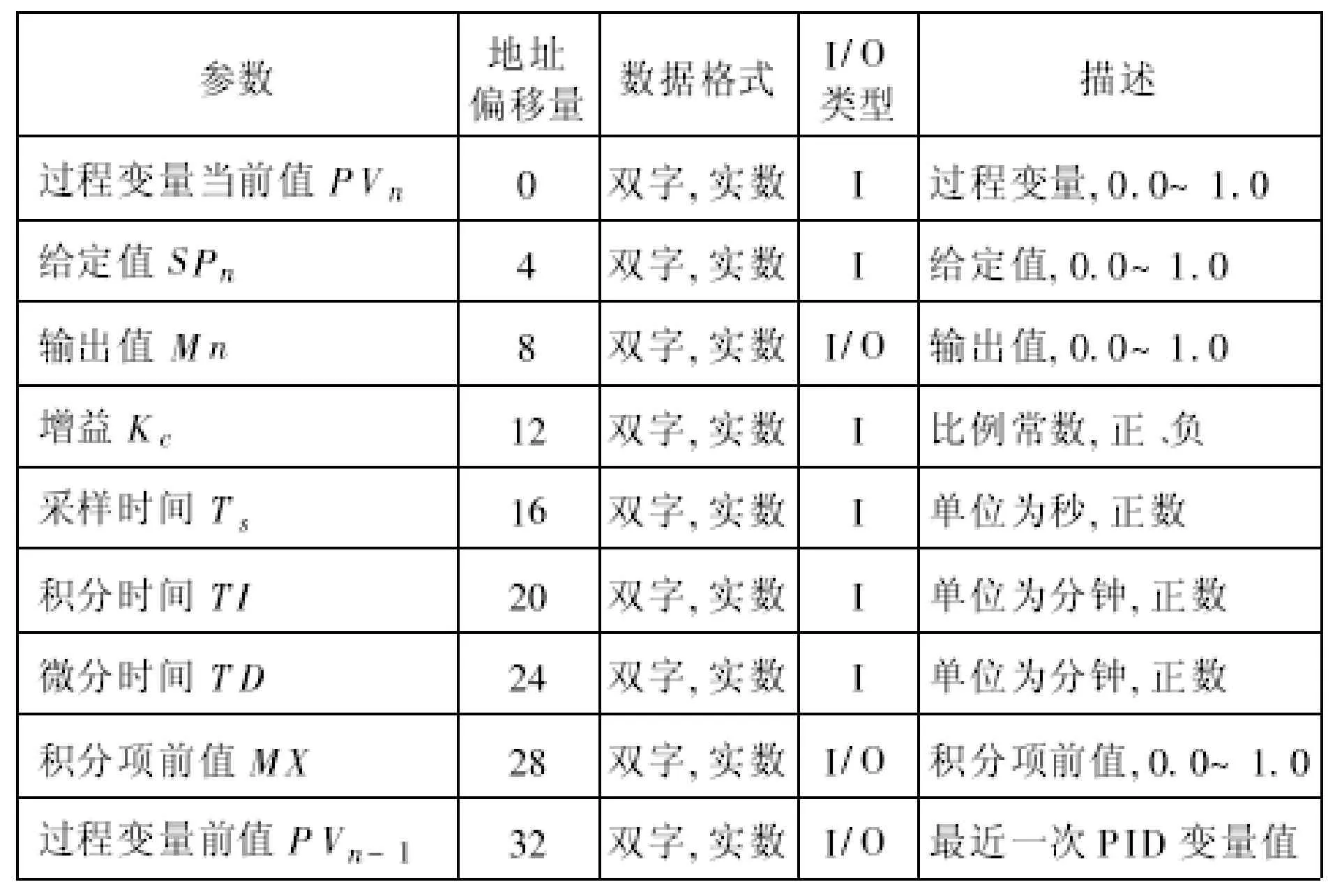
表1 PID参数及地址分配
[1]Quartus II Handbook Version 9.1.Copyright by Altera Corporation.2001
[2]冈萨雷斯 数字图像处理(第2版) 电子工业出版社2005年9月
[3]王金明.数字系统设计与Verilog HDL(第4版).北京:电子工业出版社,2011
[4]尹伟.基于FPGA的JPEG编解码芯片设计.大连理工大学硕士论文.2004
[5]张益贞 流滔.Visual C++实现MPEG/JPEG编解码技术人民邮电出版社 2002年11月
[6]刘元伟 刘彦隆 基于JPEG标准的静态图像压缩算法研究《电子设计工程》 2010年02期
[7]EDA先锋工作室 王诚 蔡海宁 吴继华 Altera FPGA/CPLD设计(高级篇)人民邮电出版社 2011年2月
[8]吴厚航 深入浅出玩转FPGA 北京航空航天大学出版社2010年5月
[9]Tinku Acharya.Ping-Sing Tsai .JPEG 2000 standard for image compression
[10]Charles Poynton .Digital Video and HDTV Algorithms and Interfaces
猜你喜欢
商品与质量(2021年43期)2022-01-18
表面工程与再制造(2019年1期)2019-12-04
汽车工程师(2019年2期)2019-03-11
汽车观察(2018年9期)2018-10-23
小学生导刊(2017年15期)2017-05-17
棋艺(2016年4期)2016-09-20
中国塑料(2016年3期)2016-06-15
汽车工程师(2015年11期)2015-09-04
汽车工程师(2015年11期)2015-09-04
专用汽车(2015年1期)2015-03-01
