
基于BP神经网络的温度预测方法
2013-09-13 12:29李会兵
电子测试 2013年19期
李会兵
(西安机电信息技术研究所,西安,710065)
0 引言
在引信的环境试验中,热源的距离、温度的传输介质等因素对于引信的实际工作温度影响很大,目前主要依靠人工经验或者简单的数据处理方式(线性关系)来判断引信的实际工作温度。温度的测量精度不高,不能够及时的反应引信工作环境的实际温度,测温的延时较大,有可能会导致热源温度与引信的实际工作温度误差较大,使其长时间处于极限工作状态,增加了损坏概率,降低了产品的可靠性。因此,本文介绍一种基于BP神经网络的温度预测方法,对引信的实际工作温度进行预测。
传统的温度测试方法主要有:1)直接测试法,该方法响应速度较慢,不能及时反映温度的变化规律;2)基于试验数据和线性回归的温度预测方法,该方法需要大量的实验数据预先建立模型,数据的获取存在较大困难,使该方法的应用受到一定的限制。因此,本文提出了一种基于BP神经网络的温度预测方法。
1 背景
1.1 传统的环境温度测试方法
传统的环境温度测试方法主要是通过微控制器采集温度传感器,通过内部校准程序对传感器的值进行校准,最后通过显示模块进行显示。具体简单模型如图1所示。

图1 传统的温度测试方法
传统的测试方法中,数据处理模块比较简单,概括起来主要有两种情况,(1)利用温度的线性标定来确定传感器的输出与温度之间的关系,利用插值法求解温度值,误差较大,不能较好的反应温度瞬时变化的过程。(2)主要利用采用以前积累的若干数据,利用线性回归的进行曲线拟合,得到若干条温度曲线,能够反应温度的变化率,但是灵活性较差,前期需要大量的数据积累,可推广性不强。
1.2 BP神经网络
BP(Back Propagation)网 络 是 1986年 由 Rumelhart和McCelland为首的科学家小组提出,是一种按误差逆传播算法训练的多层前馈网络,是目前应用最广泛的神经网络模型之一。BP网络能学习和存贮大量的输入-输出模式映射关系,而无需事前揭示描述这种映射关系的数学方程。它的学习规则是使用最速下降法,通过反向传播来不断调整网络的权值和阈值,使网络的误差平方和最小。BP神经网络模型拓扑结构包括输入层(input)、隐层(hide layer)和输出层(output layer)。其典型的模型如图2所示。

图2 BP神经网络典型模型结构图

图3 基于BP网络的温度预测模型
2 BP神经网络的温度预测方法
2.1 输入输出
环境试验温度测试原理的普通模型如图2所示,该系统中温度传感器为热敏电阻。

图2 温度测量模型
由图2可知,该测量模型的输入为瞬时温升,输出为传感器的测量温度。从温度测试的角度出发,温度预测的关注点是测试温度和热源实际温度之间的关系。因此,预测模型的输出因子是传感器的输出温度,输入因子为:热源温度变化率dt、热源与传感器的距离l、散热系数st、传感器的热特性f(t)。对于时变温度控制系统,因素热源温度变化率dt和传感器的热特性f(t)起主导作用。
于是传感器的输出温度可以表示为:

对于温度测量而言,由图2可知,其温度的变化由瞬时温升引起的,可以忽略散热系数的影响,因此,其测量温度可以表示为:

(1)、(2)式中: f1、f2为非线性功能函数。
2.2 BP神经网络
在输入因子中,热源温度变化率dt必须实时测量,通常由温控箱来模拟实现;热源与热敏电阻的距离l可以直接测量,通常一次安装结束,l为一常量;散热系数st则需要由散热介质决定,一般为空气,也可以看做定值;热敏电阻热特性f(t)由传感器特性标定得出。
本系统采用BP神经网络建立温度预测模型。输入层节点数m=3,输出层节点数n=1。隐含层采用试凑法确定为20。隐层、输出层神经元的转移函数选用sigmoid函数。网络结构如图3所示。
BP网络算法分为两部分:一是信号的正向传播过程,即训练信号由神经网络的输入层经隐层处理后传向输出层,其间每一层神经元的状态只影响下一层的神经元的状态;二是误差(E(t))的反向传播过程,即采用梯度下降的最小方差学习方式,将误差反向传播,不断调节网络中神经元之间的连接权重,使误差最终达到最小。但当梯度下降的最快方向与误差曲面最小点方向偏离较大时,参数到达最小点的路径将加长,以致网络学习效率低,速度慢。为克服这种不足,本文采用自适应学习速率(η(t))调整法。其调整公式如下:

2.3 基于BP神经网络的温度测试模型
根据输入输出的设计和BP神经网络的设计,本文建立一种基于BP神经网络的温度预测模型,如图4所示。

图4 基于BP神经网络的温度预测模型
在本温度预测模型中,利用BP神经网络的温度预测算法替代了传统的数据处理模块,利用神经网络中的自适应学习的方法对温度传感器进行预测,与直接测试法相比,有明显的优势。
3 基于BP网络的温度预测方法仿真
由于引信的形状、大小、材料等不同,为了简化描述方法,本文以汽车轮毂刹车过程中温度的变化为例,利用MALAB进行仿真试验,验证本方法的有效性。
利用传统的直接测试法,在模拟环境中进行温度数据采集,以获得的试验数据为基础,在MTLAB中仿真,对BP神经网络模型进行训练。
通过实验,分别在温度变化率为25、35和50三种情况下,安装距离为10mm,获取了部分数据,如表1、表2、表3所示。

表1 温度变化率为△t/s =25°

表2 温度变化率为△t/s =35°

表3 温度变化率为△t/s =50°
由表1、2、3中可以看出,利用直接测试方法,当温度的瞬间变化率较大时,温度测试值与实际温度存在明显的滞后,相对误差高达51%。
将上述的试验数据用于BP神经网络的训练与检验。在表1、2、3中各选一组数据作为检验样本,如表4所示,其他为训练样本。

表4 检验样本
在MTLAB中,通过软件编程,设置神经网络的训练次数为2000次,训练精度为10-3,隐含层的节点为20。
训练误差如图5中所示,训练误差最大的地方出现在温度变化率发生变化,同一温度变化率时,训练误差趋近于零。预测输出如图6所示,通过训练样本对BP神经网络进行训练,利用测试样本得到其温度预测结果。将BP神经网络温度预测方法与直接测试法进行比较,结果如表5所示。

图5 BP网络训练误差
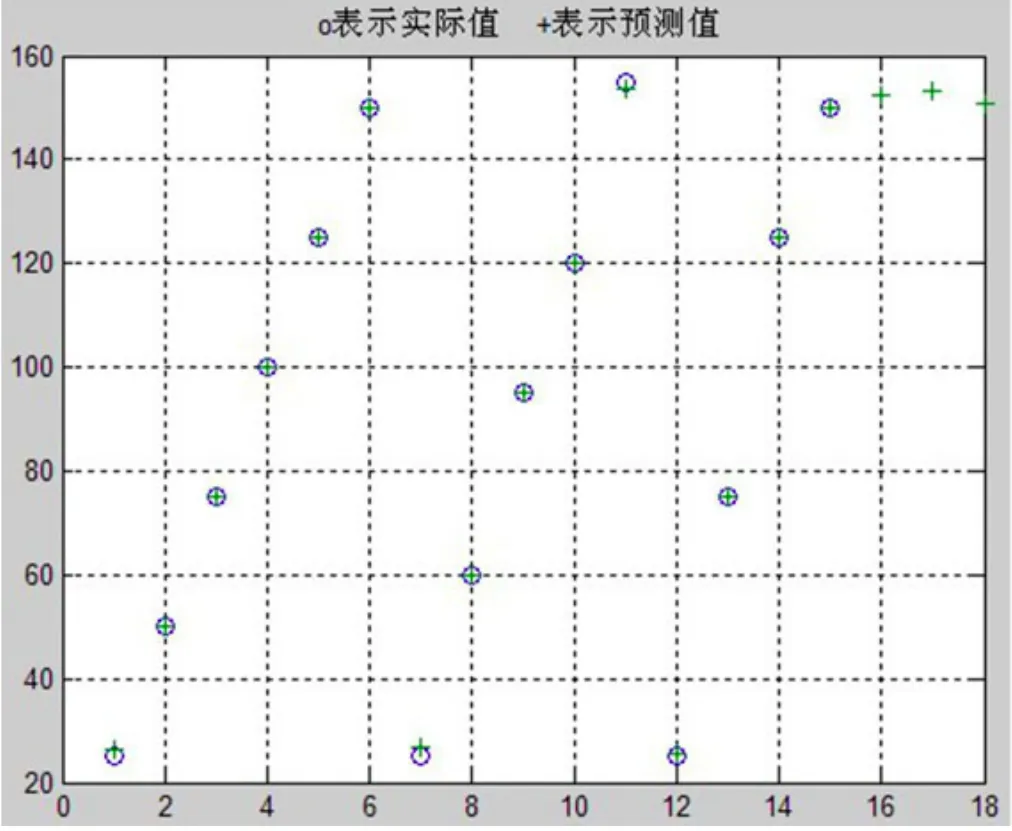
图6 BP网络预测输出

表5 预测结果误差分析表
由表5可见,BP神经网络的温度预测方法,系统的预测精度小于3.2%,比传统测量方法的测量精度有明显的提升,同时测温的延时有了明显的改善。
4 结论
本文提出了基于BP神经网络的温度预测方法。该方法通过测量瞬时温度变化率,利用BP神经网络的温度预测模型,对温度进行预测。在MATLAB中仿真表明,该方法在训练2000次后即达到设定精度,温度预测精度小于3.2%,验证了该方法的有效性。为了进一步提高温度预测精度,下一步将增加数据量,对BP神经网络的训练算法进行深入研究。
[1]周永乾.基于单片机的汽车刹车片实时温控系统[J].科技咨询.2008(18):98-99.
[2]陈飞等.长大下坡路段重型车辆刹车毂温度预测模型研究[J].
[3]李华成等.交通冲突量的BP神经网络预测方法[J].交通与计算机.2006.24(6):71-72.
猜你喜欢
湖南电力(2021年4期)2021-11-05
煤气与热力(2021年3期)2021-06-09
初中生世界·九年级(2020年9期)2020-09-21
电子制作(2019年19期)2019-11-23
电子制作(2017年19期)2017-02-02
电测与仪表(2016年14期)2016-04-11
重型机械(2016年1期)2016-03-01
大连工业大学学报(2015年4期)2015-12-11
焊接(2015年8期)2015-07-18
海军航空大学学报(2015年4期)2015-02-27
