
基于制鞋涂胶工艺的机器人喷涂速度控制研究
2013-09-12 02:28:18赵燕伟钟允晖余智胜钱世峰
机械设计与制造工程 2013年3期
赵燕伟,钟允晖,陈 建,余智胜,钱世峰
(1.特种装备制造与先进加工技术教育部/浙江省重点实验室(浙江工业大学),浙江杭州 310014)
(2.宁波江宸自动化装备有限公司,浙江慈溪 315300)
基于制鞋涂胶工艺的机器人喷涂速度控制研究
赵燕伟1,钟允晖1,陈 建1,余智胜1,钱世峰2
(1.特种装备制造与先进加工技术教育部/浙江省重点实验室(浙江工业大学),浙江杭州 310014)
(2.宁波江宸自动化装备有限公司,浙江慈溪 315300)
针对在自动制鞋涂胶过程中只考虑喷涂轨迹的问题,提出了基于制鞋涂胶工艺的机器人喷涂速度控制方法。结合制鞋涂胶工艺,分析了胶膜厚度与剥离强度的关系及胶粘剂浓度与胶膜厚度的关系,并在此基础上构建了涂胶机器人喷涂速度控制方法,对机器人末端执行机构的移动速度、喷涂姿态进行了控制参数修正。最后以Staubli机器人为例进行了喷涂实验,实验表明,该控制方法可以更精确地反映胶膜厚度与速度的关系,提高制鞋涂胶质量。
机械手;速度控制;制鞋涂胶;剥离强度
鞋类的制造一般经过造型、裁断以及装配成型等工艺过程,其中制鞋装配工艺是指把鞋帮和鞋底等部件装配在一起而成为鞋产品的技术和方法。因为胶粘鞋具有工艺简单、效率高、制造成本低等优点,所以市场上广泛应用胶粘工艺。2011年中国鞋类产量占全球65%,预计到2015年我国制鞋耗胶将达到36.82万t[1]。同时,目前制鞋粘胶过程也有其自身缺陷,主要集中在以下几点:(1)基本靠手工涂胶,胶膜厚度无法稳定控制,涂胶质量得不到保证[2]。(2)胶水主要成分苯含剧毒,是强致癌物质,严重威胁员工的身心健康[3]。(3)“劳工荒”问题,近几年工业的迅猛发展,出现招工困难,人力成本急剧上升[4]。针对这一状况,国内外很多学者对自动涂胶做了研究,Kim[5]提出了一种基于鞋底三视图和鞋面三维数据的自动提取喷涂轨迹的方法。HU等[6]提出一种应用机器视觉扫描鞋底形状自动生成轨迹的方法。武传宇等[7]对鞋底信息的机器人喷胶轨迹的计算方法进行了研究。胡小兵等[8]提出了基于蚁群算法的三维空间机器人路径规划。然而他们研究的重点大多集中在如何提取涂胶轨迹曲线信息,却很少涉及到制鞋涂胶工艺信息。评价涂胶效果的主要参考依据是剥离强度,影响剥离强度最主要的因素为:胶膜厚度、胶膜宽度、胶膜均匀性等[9]。鞋底曲面是空间三维曲面,不同曲率曲线的变化会引起机械手速度激变,影响胶膜厚度和宽度的变化,从而降低剥离强度,最终影响成品鞋的质量。
针对上述问题,本文首先讨论了胶膜厚度与剥离强度的关系及胶黏剂浓度与胶膜厚度的关系,然后根据胶膜累积原理建立相应的机器人速度控制模型,最后以Staubli机器人为例对所建立的速度模型进行了实验。
1 胶膜厚度与剥离强度的关系
剥离强度是用于检验成品鞋鞋底与鞋帮之间粘合强度的指标。根据 GB/T3903.3-2011[10]剥离强度的试验方法,在剥离试验仪上进行鞋底剥离强度试验,试验结果用剥离强度表示,剥离强度的计算公式:

式中:σ为剥离强度,N/cm;f为剥离力,N;d为刀口宽度,cm。图1所示为典型的剥离强度试验结果分析曲线图。
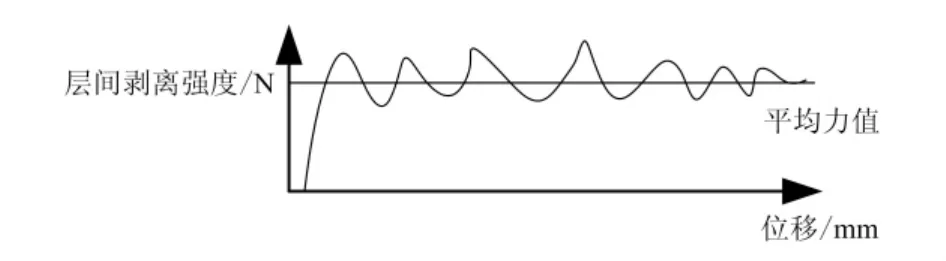
图1剥离强度试验结果分析曲线图
对材料进行涂胶剥离强度试验[2]并进行检测,从被粘物的剥离强度检测数据中可以看出,胶膜厚度与剥离强度有着密切的关系,胶膜厚度与其相对应的剥离强度的关系见表1。当胶膜厚度为0.2mm时,剥离强度最大,粘接效果最好。
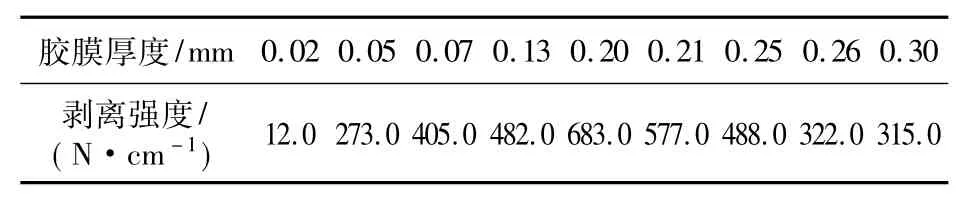
表1 胶膜厚度与剥离强度关系
从表1中可以看出,被粘物的剥离强度并不是随着胶膜厚度的增加而增加,而是先随着胶膜厚度的增加,剥离强度增加,到达一定程度后,又会随着胶膜厚度的增加,剥离强度反而降低。造成这种现象的原因主要有3个方面:(1)当胶膜厚度过小时,胶黏剂用量少,粘合面呈“点接触”,导致剥离强度偏低。(2)当胶膜厚度适中,胶黏剂用量适中,胶膜呈连续状态,剥离强度会比较高。(3)当胶膜厚度过大,胶黏剂用量过多,由于胶层太厚,胶黏剂中的溶剂挥发不畅,当胶液表面形成膜后,内部的溶剂难以挥发,就会产生气泡,从而降低剥离强度。
2 胶黏剂的浓度与胶膜厚度的关系
胶黏剂和被粘物之间进行粘接的时候,胶黏剂会有一部分湿润在被粘物当中。目前,胶黏剂与被粘物之间的粘接理论主要有:吸附理论、扩散理论、静电理论、化学键理论和机械结合理论。对于胶黏剂与被粘物表面不管通过什么机理进行粘接,所形成结合的前提都是两者必须达到分子水平接触,因此胶黏剂对被粘物表面良好湿润是形成优良胶接的必要条件。
由Poiseulle定律[3]可以得到描述液体在毛细管孔隙中的渗入计算公式:

式中:s为孔隙的渗透距离;η为胶黏剂黏度;p为毛细管压力;t为时间;r为孔隙半径。毛细管压力的计算公式:

式中:γLV为胶黏剂的液-气表面张力;θ为粘接材料之间的接触角,如图2所示。当材料处于完全湿润时,接触角为0°。

图2 粘接材料之间的接触角
将式(3)带入式(2)中,可得孔隙渗透深度随时间的渗透距离公式为:
3 涂胶机器人速度控制
由上文的分析可知,机器人涂胶操作受到胶膜厚度、胶黏剂的浓度、湿润深度等多种因素影响,其中胶膜厚度是影响鞋子质量的最重要因素,而胶膜厚度的形成,又与机器人移动速度有关。在喷涂速度一定的情况下,当机器人移动速度快时,单位时间内形成的胶膜厚度比较薄;当机器人移动速度比较慢时,单位时间内形成的胶膜厚度比较厚。
在机器人涂胶过程中,涂胶胶膜厚度的形成与机器人移动速度、胶液从上到下的流速、胶液的浓度、烘干时间等因素有关。图3所示为末端胶口形状的三维模型。在动态涂胶移动过程中,可以将涂覆的模型简化(如图4所示)。

图3 末端胶口形状的三维模型
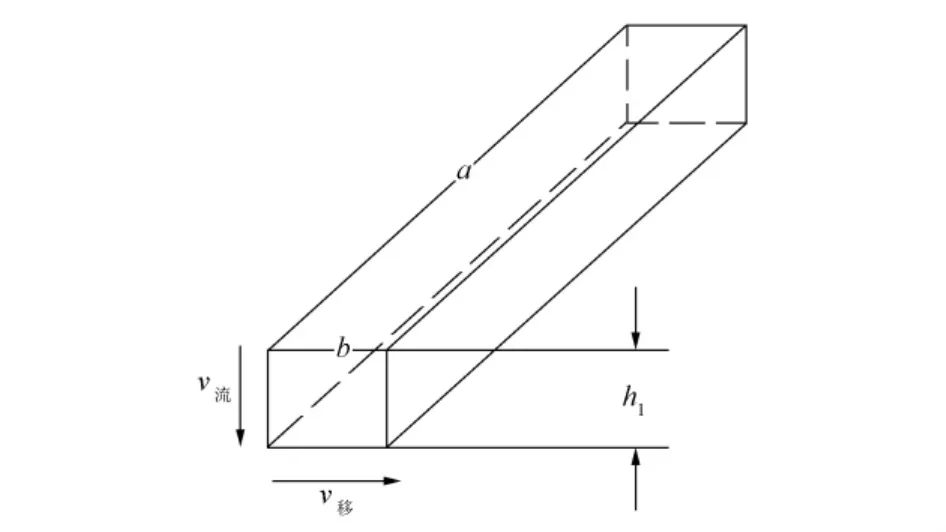
图4 动态涂胶涂覆简化模型
在材料上形成的胶膜厚度为h1,胶流速为v流,水平移动的速度为v移。在Δt内涂覆的模型关系式:
而胶膜厚度形成还要受到胶液湿润作用、胶液浓度大小及烘干作用的影响。因此结合前面分析,最终得到实际在被粘物上的胶膜厚度h2为:

式中:ρ溶胶为溶胶挥发前的密度;ρ胶为溶剂挥发后的干胶密度;m为胶水的浓度。
4 运动涂胶实验
选取制鞋工厂中应用最广泛的混配型氯丁胶黏剂(CR),型号为CR2461,选择成年男鞋25号为涂胶样品,根据沿条宽度选择涂胶宽度为20mm,供胶系统参数见表2。

表2 供胶系统参数
在皮革材料上进行涂胶胶膜厚度实验,控制涂胶移动速度为120mm/s,并在显微镜下进行厚度测量。测量所得的数据见表 3,其整体均值为0.088mm。

表3 胶膜厚度实验数据 mm
式(7)可以反映出当喷枪流量速度v流固定时,胶膜厚度与机器人末端执行器移动速度v移之间的关系。通过调节机器人末端执行器的移动速度,可得到理想的胶膜厚度,图5所示为胶膜厚度与机械手移动速度关系。

图5 胶膜厚度与机械手移动速度关系
5 结束语
本文通过分析影响胶膜厚度均匀性的因素,建立了制鞋涂胶胶膜厚度及其均匀性与涂胶品质的关系,并根据所需要的胶膜厚度及其均匀性要求,建立了喷涂速度控制模型。通过调节机械手的移动速度得到了理想中的胶膜厚度,提高了涂胶品质。另外,本文研究对象为平面内的鞋底曲线轨迹,对于三维空间变化更加复杂的轨迹,需要进一步研究空间曲率对胶膜形态的影响,因此今后将对三维空间轨迹涂胶的胶膜均匀性控制进行更深入的研究。
[1]沈但理.我国胶鞋/制鞋行业概况及用胶发展趋势[J].橡胶工业,2011,58(9):568-571.
[2]王朋,王海涛.工业机器人应用又一亮点——制鞋成型工艺[J].机器人技术与应用,2005(4):37-39.
[3]包其富,高越晗.点源分析模式法评价鞋用胶的危害程度[J].劳动保护科学技术,1999,19(2):35-37.
[4]简新华.“劳工荒”的原因、利弊分析与合理应对[J].中国经济问题,2010(3):9-13.
[5]Kim J Y.CAD-based automated robot programming in adhesive spray systems for shoe outsoles and uppers[J].Journal of Robotic Systems,2004,21(11):625-634.
[6]Hu Zhongxu,Bicker Robert,Taylor Paul.Computer vision for shoe upper profile measurement via upper and sole conformal matching[J].Optics and Lasers in Engineering,2006,45(1):183-190.
[7]武传宇,贺磊盈,李秦川,等.基于CAD模型的鞋底喷胶轨迹生成方法[J].计算机辅助设计与图形学学报,2008,20(5):678-682.
[8]胡小兵,黄席樾.基于蚁群算法的三维空间机器人路径规划[J].重庆大学学报,2004,27(8):132-135.
[9]弓太生.皮鞋工艺学[M].北京:轻工业出版社,2006.
[10]闫宏伟,田旺.GB/T3903.3-2011《鞋类整鞋试验方法剥离强度》国家标准解读[J].中国皮革,2012,41(14):105-116.
Study on the Speed Control of Robot Spraying Based on Shoemaking Glue Process
ZHAO Yanwei1,ZHONG Yunhui1,CHEN Jian1,YU Zhisheng1,QIANG Shifeng2
(1.Zhejiang University of Technology,Zhejiang Hangzhou,310014,China)
(2.Ningbo Jiangchen Automation Equipment Ltd.,Co.Zhejiang Cixi,315300,China)
Aiming at the problem of only considering spray trajectory in the process of automatic shoemaking glue,it puts forward a method of speed control based on robot spraying craft.It analyzes the relationships of the film thickness and peeling strength,the adhesive concentration and film thickness with shoemaking glue process,sets up the control speed of glue-robot.The parameters of moving speed and spraying posture of robot endeffecter are corrected.Finally,it takes a Staubli robot as an example to carry out for spraying experiments,and the results show that the constructed control model can more accurately reflect the relationship between film thickness and robot moving speed,improve the quality of shoemaking glue.
Manipulator;Speed Control;Shoe Glue;Peel Strength
TH123.1
A
2095-509X(2013)03-0062-04
10.3969/j.issn.2095-509X.2013.03.014
2012-07-19
浙江省重点科技创新团队资助项目(2010R50002-11)
赵燕伟(1959—),女,河南郑州人,浙江工业大学教授,主要研究方向为数字化产品设计理论与方法、数字制造/数字装备建模与仿真的基础理论和关键技术、开放式数控技术开发与装备智能化、网络环境下的数字制造技术等。
猜你喜欢
辽宁化工(2024年6期)2024-07-11 19:02:07
合成材料老化与应用(2022年5期)2022-10-25 07:13:32
合成材料老化与应用(2022年4期)2022-08-25 12:00:54
沈阳理工大学学报(2022年1期)2022-06-09 08:42:24
印制电路信息(2021年10期)2021-12-08 06:00:32
中国民航大学学报(2021年2期)2021-06-24 01:08:16
测控技术(2018年2期)2018-12-09 09:01:04
国际木业(2016年8期)2017-01-15 13:55:09
西部皮革(2016年4期)2016-04-09 06:47:44
Coco薇(2015年1期)2015-08-13 02:22:23
