
飞机液压地面试验台安装的空间测量分析
2013-09-12 02:28:14顾豪杰赵东标
机械设计与制造工程 2013年3期
顾豪杰,赵东标
(南京航空航天大学机电学院,江苏南京 210016)
飞机液压地面试验台安装的空间测量分析
顾豪杰,赵东标
(南京航空航天大学机电学院,江苏南京 210016)
研究了飞机地面模拟液压系统试验台的现场安装测量过程,提出了基于激光跟踪仪的现场安装环境布置和测量方法。通过构建基准点的基准坐标系和激光跟踪仪的测量坐标系之间的映射关系,建立三维坐标转换方程。应用最小二乘迭代法得出了坐标转换算法,并用MATLAB对该算法进行了仿真验证。
试验台;空间测量;激光跟踪仪;坐标转换
飞机铁鸟试验[1]中液压系统的地面模拟试验台用大功率变频电机模拟航空发动机,通过传动系统驱动发动机驱动泵(EDP),左右两翼各有1套。试验台底座采用地脚螺栓与地面固连,2套试验台均安装在地面上。
试验台机械结构的安装有严格的位置精度要求。其安装精度直接关系到试验台能否正常工作,不合理的安装将引起试验台剧烈振动、联轴器偏转、轴扭曲变形等故障。试验台的位置精度是整个铁鸟试验合理布局的重要内容。试验台安装时,必须使系统轴线与铁鸟台X轴平行,液压泵的位置有具体的坐标要求,且系统安装精度为±0.5mm。
为此,本文基于激光跟踪仪提出了新的安装测量方法:通过合理布置现场测量环境,结合基准点的测量构建坐标转换算法,实现测量点靶标的测量和计算,完成试验台的高精度安装。
1 仪器选择和测量环境布置
目前室内大尺寸空间测量设备主要有激光跟踪仪、激光雷达、室内GPS等[2]。根据测量范围、测量精度、测量效率、测量可靠性、测量方便性等实际情况综合考虑,选择使用激光跟踪仪作为空间测量设备。采用激光跟踪仪进行试验台的安装测量,不仅精度高,而且成本低,使用维护简单[3]。
本文选用Leica AT901-B激光跟踪仪对安装的整个过程进行现场测量。激光跟踪仪的干涉距离分辨率为0.32μm,干涉测长精度±0.5μm/m;角度测量分辨率为0.14″,角度测量精度±15μm+6μm/m。
本文安装测量的试验台结构如图1所示。

图1 液压试验台机械结构(右翼)
试验台的现场安装测量必须先解决好测量环境的设计问题,及测量场(测量系统根据测量仪器设备所能覆盖的测量范围)的布置[4]。这是测量系统提高测量精度,顺利实现装配的基础。
测量场的建立,需要合理设计并布置靶标工具球。在厂房地面上布置地标点(TB点),地标点的理论坐标值必须准确记录,用以构建基准坐标系。地标的安装要精确计算所放靶球的球心位置坐标值。在装配零件上布设测量点靶标(OTP点),设置在不会发生挡光处,作为装配时测量基准数据。
对用于建立基准坐标系的基准点,需要满足如下基本要求:(1)基准点的靶标在地面上的安装要平整、稳定;(2)靶标点相互之间间距较远且均匀排布,多方向分布,要能覆盖整个测量场;(3)建立基准坐标系至少需要3个基准靶标点,点越多,拟合效果越好;(4)测量过程中所建立的坐标系均采用笛卡尔坐标系。测量场左翼液压试验台空间测量示意图如图2所示。
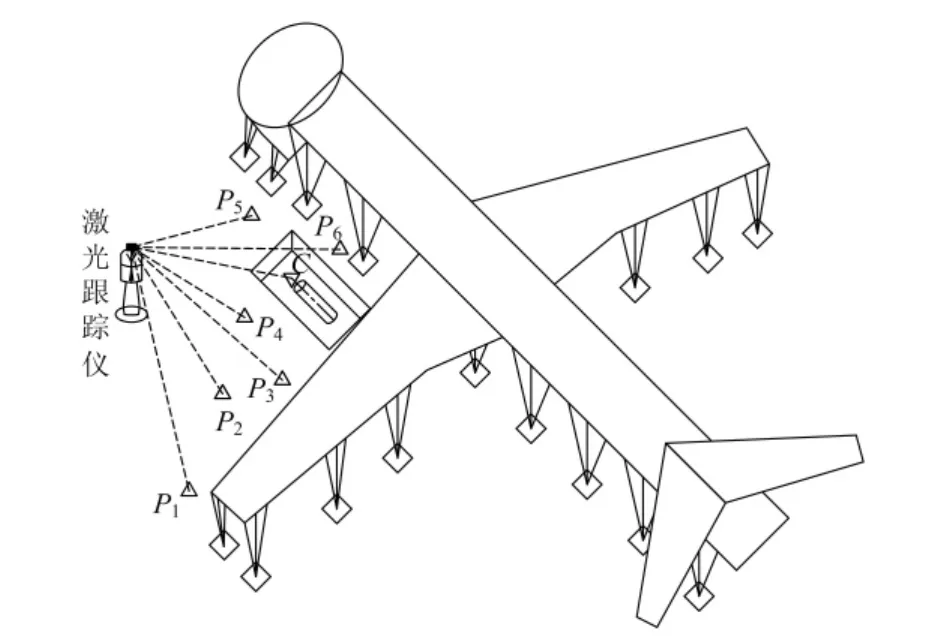
图2 激光跟踪仪现场测量示意图
安装时,用激光跟踪仪测量安装在地面上的n个坐标基准点,拟合并建立基准坐标系。根据工装定位件上OTP点的坐标值开始安装,定位件上至少有3个OTP点,以确定元件在空间的6个自由度。安装时,通过不断循环依次测量3个OTP点(注意在移动反射器时切勿打断激光束),调整元件位置,直至实测值和理论值的差值符合试验台设计要求,然后将其固定。
2 空间测量的理论分析
为了将测量坐标系的测量值统一到基准坐标系下以确定具体的安装位置,需要构建坐标转换关系。本文涉及两个坐标系,假设基准坐标系为O1-X1Y1Z1,激光跟踪仪测量坐标系为 O2-X2Y2Z2[5],如图 3 所示。

图3 空间中两直角坐标系
根据空间中两个不同直角坐标系的位置状态,可以对坐标系O2-X2Y2Z2做如下变换:(1)分别绕 X2轴、Y2轴、Z2轴旋转 α,β,γ 角度,使三坐标轴平行;(2)尺度缩放(1+k)倍,使两坐标系单位长度相等;(3) 分别沿X2轴、Y2轴、Z2轴平移Δx,Δy,Δz距离,使两坐标系重合。根据上述坐标系O2-X2Y2Z2到坐标系O1-X1Y1Z1的转换过程,可得坐标转换的数学模型


式中:[x',y',z']T是测量坐标系三维坐标向量,令其为矩阵 C;[x,y,z]T是基准坐标系三维坐标向量,令其为矩阵 T;[Δx,Δy,Δz]T是平移向量,令其为平移矩阵ΔT;k是尺度参数;R是旋转矩阵。
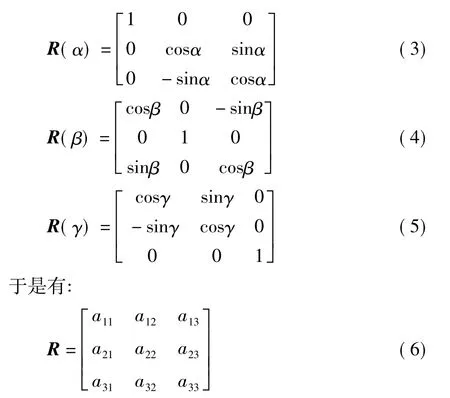
式中:a11=cosβcosγ;a12=cosαsinγ +sinαsinβcosγ;a13=sinαsinγ - cosαsinβcosγ;a21= - cosβsinγ;a22=cosαcosγ - sinαsinβsinγ;a23=sinαcosγ +cosαsinβsinγ;a31=sinβ;a32= - sinαcosβ;a33=cosαcosβ。
若七参数 (Δx,Δy,Δz,α,β,γ,k) 已知,根据式(1)可以实现两个坐标系之间的转换,而本文需要通过一系列坐标基准点(也叫公共点)在两个坐标系下的坐标值反求七参数。由未知参数个数可知,要想求解,至少需要3个公共点。令x1~x7代替七参数,变换得:

转化为方程组形式如下:
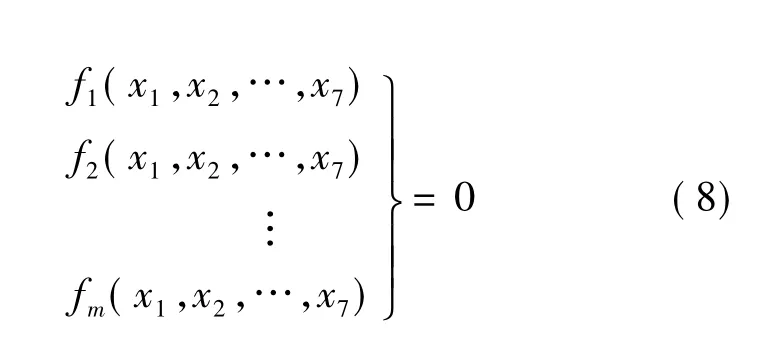
式中:m=3n,n为公共点数,且n≥3。
将式(8)简化为f(X)=0,该方程组是非线性的,无法直接求解[6]。设 Xk=[xk1,xk2,,xk7]T为解的某估值,在Xk处对fi(X)作泰勒展开:

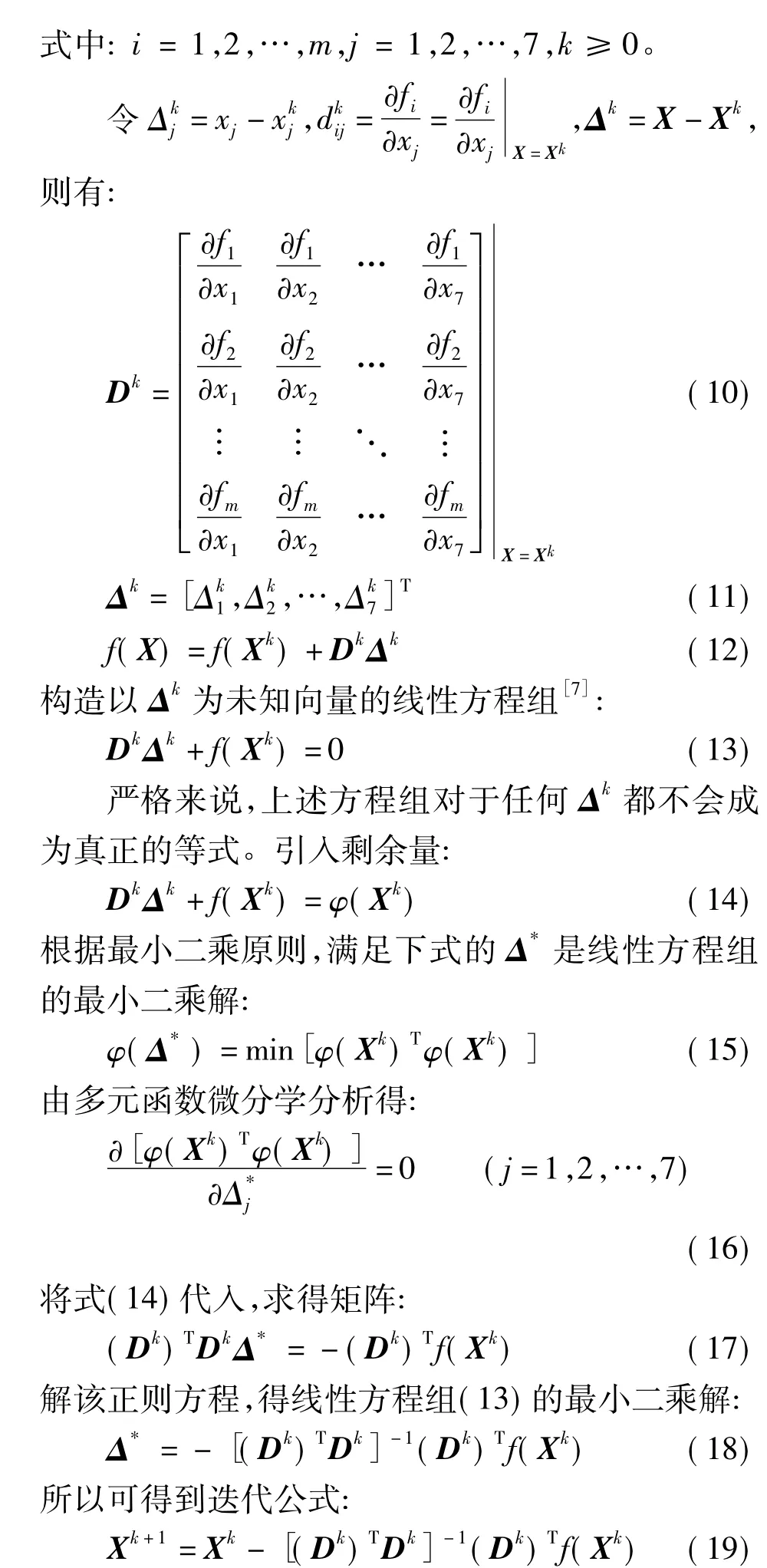
当k=0时,X0为迭代初值,代入式(19)进行迭代,在迭代过程中,直到两相邻七参数的向量差的二范数小于阈值,则停止迭代,即得最小二乘迭代法下的最优解。
3 仿真分析及验证
某次测量时,选取了7个基准点,点的基准坐标值见表1。
用激光跟踪仪测量这些基准点,得到其在测量坐标系下的坐标值,见表2。
为了实现坐标的转换,用MATLAB编写了计算程序,程序功能如下:(1)根据3个或以上的公共基准点在两坐标系下的坐标值计算转换七参数矩阵 X=[x1,x2,,x7]T;(2)根据矩阵 X 计算空间坐标点在两套坐标系下的转换。
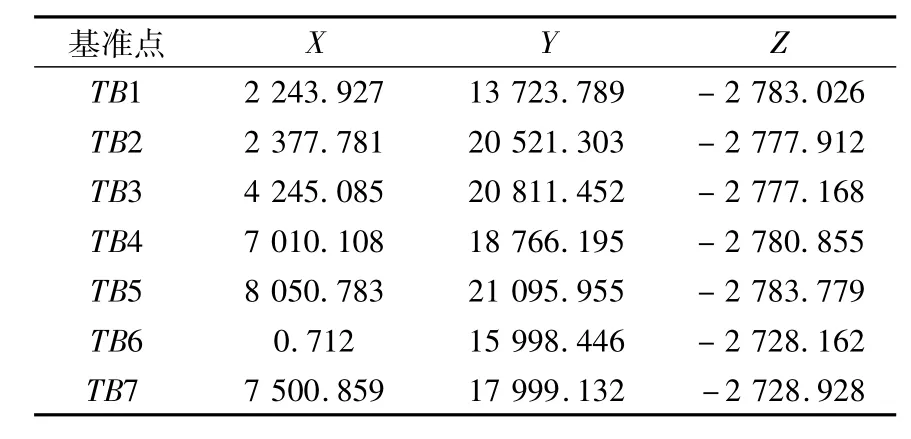
表1 基准点基准坐标值 mm

表2 基准点测量坐标值 mm
取不同基准点个数分析对该算法的影响,从TB1-TB7中分别顺序选取3~7个基准点,按照初始值为全零向量进行迭代计算,迭代次数见表3。

表3 不同基准点个数下的迭代次数
由表3可见,无论选取多少个基准点,本文的算法都能在较少的迭代次数内收敛。迭代次数随着所取基准点数的增加,呈先减少后增加的趋势,故选取5个基准点计算坐标转换的七参数矩阵是比较合理的。
取前5个基准点时,得坐标转换的平移矩阵、旋转矩阵和尺度参数如下:

对求得结果进行分析:将原基准点测量坐标值带入转换函数,得到转换值与初始值的对比,观察其一致性。计算坐标与初始坐标的差值,见表4。
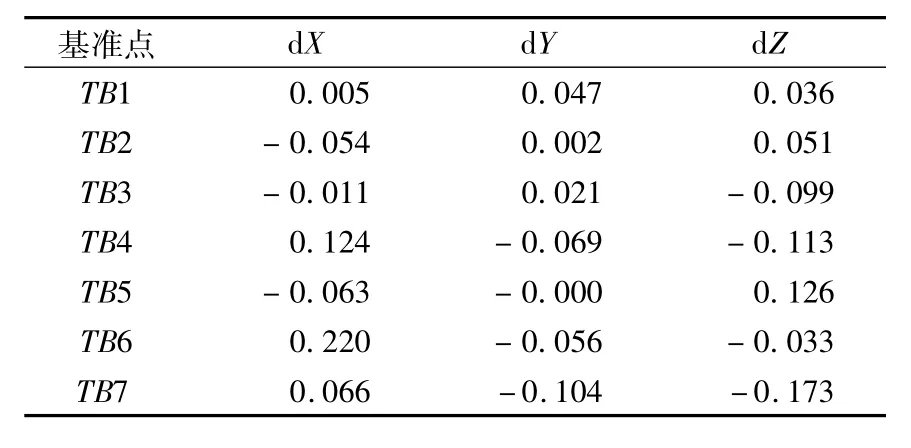
表4 计算坐标与初始坐标差值 mm
表4的坐标差值表明,由该方法得到的七参数矩阵是正确可行的,且满足了试验台安装精度要求。由此可得,用激光跟踪仪测量未知靶标点的坐标,代入前面解得的平移矩阵、旋转矩阵和尺度参数,即可以得到具有一定精度的靶标点的全局坐标值。
4 结束语
鉴于飞机地面模拟液压试验台安装时的位置精度要求,本文应用激光跟踪仪提出了基于最小二乘迭代的坐标转换算法,通过编写MATLAB程序对测量值进行仿真分析。计算结果表明其精度满足了系统安装要求,证明了该算法的可行性。
[1]周昌明.客机液压系统地面模拟试验设计探讨[J].民用飞机设计与研究,2006(1):15-19.
[2]王莉,方伟,邢宏文.大尺寸空间测量方法的实施及应用[J].南京航空航天大学学报,2012,44(S1):48-51.
[3]林嘉睿,邾继贵,郭寅,等.现场大空间测量中精密三维坐标控制网的建立[J].机械工程学报,2012,48(4):6-11.
[4]邹冀华,周万勇,邹方.数字化测量系统在大部段对接装配中的应用[J].航空制造技术,2010(23):52-55.
[5]张宏.布尔莎-沃尔夫转换模型的几何证明[J].测绘与空间地理信息,2006,29(2):46-51.
[6]刘国林.非线性最小二乘与测量平差[M].北京:测绘出版社,2002.
[7]冯康.数值计算方法[M].北京:国防工业出版社,1978.
Analysis on the Space Measurement of Mounting the Hydraulic Ground Test Platform of Aircraft
GU Haojie,ZHAO Dongbiao
(Nanjing University of Aeronautics and Astronautics,Jiangsu Nanjing,210016,China)
The field installation and measurement of the hydraulic system test platform for ground simulation of aircraft is studied.On the base of the laser tracker,a method for field installation environment layout and measurement is proposed.By constructing a mapping relation between the reference coordinate system of the reference points and the measurement coordinate system of the laser tracker,the three dimensional coordinate conversion equations are established.The coordinate conversion algorithm is formed by applying the least squares iterative method.Finally the algorithm is validated by the MATLAB simulation.
Test Platform;Space Measurement;Laser Tracker;Coordinate Transformation
TB92
A
2095-509X(2013)03-0045-04
10.3969/j.issn.2095-509X.2013.03.010
2012-12-07
顾豪杰(1987—),男,浙江上虞人,南京航空航天大学硕士研究生,主要研究方向为机电一体化技术。
猜你喜欢
北京汽车(2023年1期)2023-03-03 00:50:38
华中建筑(2022年4期)2022-04-14 07:50:52
现代测绘(2021年1期)2021-04-28 10:19:56
制造技术与机床(2018年12期)2018-12-23 02:41:02
机械研究与应用(2018年3期)2018-07-11 00:25:38
工业设计(2016年7期)2016-05-04 04:02:44
江西煤炭科技(2015年2期)2015-11-07 03:10:00
机械工程师(2015年9期)2015-02-26 08:38:08
全球定位系统(2010年2期)2010-07-18 03:49:58
山西建筑(2010年13期)2010-07-17 11:24:02
