
机械运动参数测定综合实验的设计
2013-09-08 09:15付顺玲李允旺程志红
实验技术与管理 2013年11期
付顺玲,李允旺,程志红
(中国矿业大学 机电工程学院,江苏 徐州 221116)
机械运动参数是指运动构件的位移、速度、加速度等参数,它们是机械设计的重要技术参数,这些参数直接反映了机器的工作性能[1]。通过位移分析,可以确定机构的外廓尺寸、构件运动所需的空间与构件位置的变化规律;通过速度分析,可以确定机构中从动件的速度变化规律;通过加速度分析,可以确定机构中各构件及构件上某些点的加速度,从而了解机构加速度的变化规律,为计算惯性力进行动力学分析、机构动力平衡分析,以及防止振动与噪声奠定了良好的基础。在实验教学中,开展机械运动参数测定综合实验,学生能够加深对机构的位移、速度、加速度以及转速和回转不均匀率等运动特性的了解与认识,以及验证理论分析的正确性[2]。
1 实验平台的构成
基于曲柄滑块机构运动平台上安装了测量转速、位移、加速度的传感器,通过计算机进行数据采集,采用基于LabVIEW的虚拟实验系统对数据进行分析、处理,构成了机构运动参数测定的综合实验系统。
1.1 实验目的
(1)了解滑块的位移、速度、加速度的测定以及转速、回转不均匀率的测定方法。
(2)了解光电脉冲编码器、传感器的基本原理与使用方法。
(3)了解用LabVIEW软件编程的方法以及分析机械系统的功能。
(4)比较虚拟实验的理论运动线图与实测运动线图的差异,提高对虚拟实验和实际实验的位移、速度、加速度、角速度、角加速度的感性认识[3-4]。
1.2 实验原理
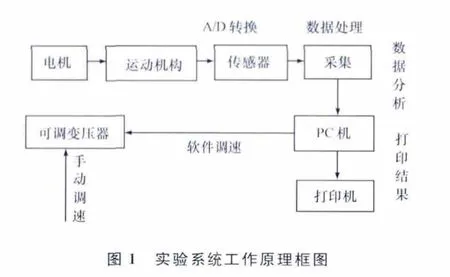
在曲柄滑块机构的运动平台上,采用光电编码器对曲柄的转速进行测量,利用位移传感器和加速度传感器进行滑块的运动参数测量,再利用安装在计算机中的数据采集卡,将采集的运动参数送到计算机内,采用基于LabVIEW的虚拟实验系统对实验数据进行采集、处理与显示,并可进行实验结果与报告的编辑与输出。实验系统工作原理框图如图1所示。
2 硬件系统设计
硬件系统是由曲柄滑块机构运动平台、高精度光电旋转编码器、线位移传感器与加速度传感器、计算机、数据采集卡、打印机等设备所组成。曲柄滑块机构运动平台主要由基座、电机、曲柄滑块机构所组成,如图2所示。

图2 硬件系统
电机通过V形带带动机构的曲柄转动,电机调速器可用于电机转速的调节与设定。光电编码器通过弹性联轴器与曲柄旋转轴同轴安装,拉杆式位移传感器外壳固定在机构运动平台的基座上,拉杆与滑块连接。这样位移传感器的拉杆与滑块同时往复运动,实现对滑块位移的测量,进而可以计算出滑块的速度与加速度数值。为了能直接对滑块的加速度进行测量,在滑块上安装了集成电路式压电加速度传感器,可将滑块的直线加速度转换成电信号。数据采集卡将采集的传感器信号,通过10MB/100MB以太网RJ-45接口与计算机连接,采用TCP协议进行通信。计算机中安装了用LabVIEW编制的数据处理与显示软件,对测试参数进行计算处理,并显示各条运动曲线。也可将直接测量的运动参数和间接计算获得的测试数据与运动曲线进行比较。实验系统中还配备了打印设备,测试完成后能够进行实验报告的编辑与打印。
硬件测试系统的功能是测定曲柄滑块机构的曲柄转速、滑块的位移、加速度等信号,利用数据采集卡将运动参数采集至上位机,上位机利用LabVIEW编制的虚拟采集仪器进行数据采集、处理,显示运动曲线。在机构运动中,滑块的往复移动通过光电脉冲编码器转换输出具有一定频率、0~5V电平的2路脉冲,输入数据采集卡,将滑块位移转换为电压值,通过A/D转换器转变为数字量。
利用光电脉冲编码器采样功能,可获得以机构主轴角度变化为横坐标的机构运动线图。机构的速度、加速度数值由位移经数值微分和数字滤波得到,数据通过传感器与数据采集系统将机构的运动数据通过计算机串口送入计算机内进行处理,形成运动构件的实测运动曲线,为机构运动分析提供了检测方法与手段[5-6]。
3 软件分析系统设计
软件分析系统是用LabVIEW仿真软件包测量理论运动线图,利用LabVIEW建立的仿真模型,仿真出与机构尺寸一致的曲柄滑块机构的构件运动曲线,以便进行运动曲线的比较,能够让学生了解理论与实际运动线图的差异,以及机构几何参数对机构运动性能的影响,利用LabVIEW建立曲柄滑块机构的几何模型运动仿真,形成并打印出实验数据与曲线的实验报告[7-8]。软件分析系统如图3所示,它包括了“文件”,“实验内容”,“常用四杆机构”,“帮助”等主选单(菜单)。
(1)“文件”下拉选单包括存盘、删除、打印、退出等子选单。
(2)“实验内容”下拉选单包括实验指导书、实验录像、实测、仿真、实验结果等子选单。
(3)“四杆机构动画”下拉选单包括常用平面机构动画与视频子选单。
(4)“四杆机构简图”下拉选单包括以 Web形式显示各种平面机构的计算公式与可动的运动简图子选单。
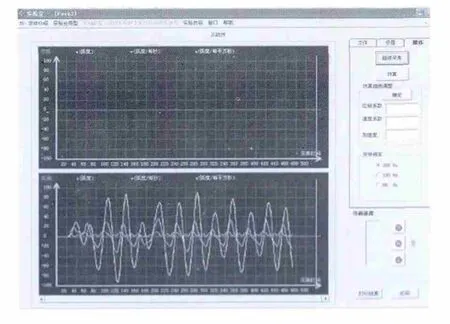
图3 软件分析系统界面
4 实验测量内容
4.1 滑块位移、速度、加速度的实际运动线图的测量
(1)打开电源开关启动机构,顺时针调节电位器以增大转速,等待机构运转稳定后开始采样,采样结束后,在计算机屏幕上显示位移变化曲线。
(2)启动计算机,双击桌面上的“机械运动参数测定综合实验”图标运行测试软件,进入测试主界面。
(3)开启实验台的电机,等待机构运转稳定后,在软件界面中输入有关提示参数。
(4)点击界面中的“测试”命令,进入实验界面,进行数据采集和分析,显示对应的动态参数波形图。
(5)点击该实验界面中的“打印”命令,可打印出实测的动态参数波形图。
(6)实验结束,将电机速度调零,关闭电机电源,点击“退出”命令,则退出实验系统[9-10]。
4.2 滑块位移、速度、加速度理论仿真运动线图的测量
(1)在“仿真测试”选单中选择“运动仿真与测试”完成曲柄滑块机构的运动测试。点击“采样”进行数据测试,点击“仿真”进行理论数据分析。计算机对该机构进行数码仿真,显示出对应的动态参数理论波形图。
(2)点击该实验界面中的“打印”选单,可打印出理论的动态参数波形图。
5 结束语
“机械运动参数测定综合实验系统”可以进一步扩展,能够完成四杆机构、滑块机构、凸轮机构、间歇运动等机构的拼装与设计,以及机械运动参数测试与分析,成为机械运动参数测定的综合实验系统[11]。机械运动参数实时实验、测试操作、数据与图形处理可以使得实验更加新颖、更具有吸引力,能够大大地激发学生的学习兴趣。本实验设计改进了实验手段,提高了教学效果,有利于学生创新与实践能力的培养[12]。
(References)
[1]陈亚琴,孟梓琴,杨梦晨.机械设计基础实验教程[M].北京:北京理工大学出版社,2006.
[2]罗亚林.机械运动学参数测定与分析的设计及应用[J].实验技术与管理,2003,20(1):46-48.
[3]孙恒,陈作模,葛文杰.机械原理[M].北京:高等教育出版社,2010.
[4]朱文坚,谢小鹏,黄镇昌.机械基础实验教程[M].北京:科学出版社,2005.
[5]王国强,张进平,马若丁.虚拟样机技术及其在ADAMS上的实践[M].西安:西北工业大学出版社,2002.
[6]郑建荣.ADAMS:虚拟样机技术入门与提高[M].北京:机械工业出版社,2001.
[7]古天龙.构建面向应用型人才培养的实践教育体系[J].实验技术与管理,2011,28(12):7-8.
[8]杨元兆,唐浙东,胡培钧,等.机械运动参数测定综合实验台的研制[J].实验室研究与探索,1992,11(3):72-75.
[9]杨昂岳.毛笠泓.夏宏玉,等.实用机械原理与机械设计实验技术[M].长沙:国防科技大学出版社,2009.
[10]邹旻,祝海林,胡爱萍,等.机械基础实验教学中心的建设与思考[J].实验技术与管理,2010,27(7):110-111.
[11]徐涛,王力,丁颖,等.机械基础实验教学中心运行机制与管理模式[J].实验室研究与探索,2008,27(6):141-142.
[12]刘映琦,刘肃,李建,等.提高实验教学质量的创新实践与探索[J].实验科学与技术,2010,8(3):54-57.
猜你喜欢
当代水产(2022年6期)2022-06-29
机械工程师(2021年4期)2021-04-19
设备管理与维修(2019年22期)2019-12-19
汽车观察(2018年12期)2018-12-26
金桥(2018年4期)2018-09-26
劳动保护(2018年8期)2018-09-12
中国塑料(2015年9期)2015-10-14
河南科技(2015年2期)2015-02-27
油气田地面工程(2014年5期)2014-03-09
河南科技(2014年6期)2014-02-27
