
钻杆自动排放转运和移运系统分析及结构设计
2013-09-07 10:36:32张敬
石油矿场机械 2013年9期
张 敬
(渤海装备辽河重工有限公司,辽宁 盘锦124010)*
在海上钻井过程中,需要将钻杆从井口移送到钻杆排放架或从钻杆排放架移送到井口。其特点是具有危险性,是一个重复性高而劳动强度大的过程,需花费大量时间,多人合作共同完成。在海上钻井作业中常遇风浪,工作环境恶劣,安全性更为突出;同时,海上钻井成本很高,加快钻井速度,缩短钻井周期显得尤为重要[1-2]。
海洋钻井平台上的钻杆从井架排放到钻杆架上需要经过钻杆的转运和移运2个过程。本文针对钻杆自动转运系统和钻杆自动移运系统进行结构设计分析。
1 技术分析
本设计主要参数:钻井深度7 000m,钻杆直径127mm(5英寸),壁厚12.7mm (0.5英寸),长12 m,质量35.79kg/m;钻杆接头外径147mm,钻杆组合长度457.2mm,质量32.62kg/m。在海洋上钻井为了节省钻杆的安装时间,通常将3根钻杆用钻杆接头组合成立根,单根立根质量1 350kg、总长37.37m。
1.1 自动转运系统
钻杆自动转运系统主要是实现钻杆从井架上的垂直位置转动到水平位置。在这个过程中需要一个能够从垂直位置转动到水平位置的转运臂,采用液压缸推动转运臂转动实现从垂直位置转动到水平位置的过程。在钻杆从井架上的垂直位置转换到水平位置的过程中还需要机械手抓紧机构抓紧钻杆,防止钻杆从转运臂上滑落[3-5]。
1.2 自动移运系统
钻杆自动移运系统主要是实现钻杆从转运臂上转运到钻杆架上。在这个过程中,需要一个能够从转运臂上抓住钻杆并且移动到钻杆架上的移动系统,该移动系统由水平移动的小车、抓住钻杆起升降落的机械手、存放钻杆的钻杆架组成。由于3根钻杆组合成的立根较重,因此采用液压缸带动机械手运动,实现钻杆的起升和下降过程[3-5]。考虑到钻杆的水平移动平稳性和精确定位,以液压马达为小车的驱动机构。
2 钻杆自动转运系统结构设计
钻杆自动转运系统由转运臂、伸缩臂、机械手总成和底座4部分组成,其基本结构如图1所示。
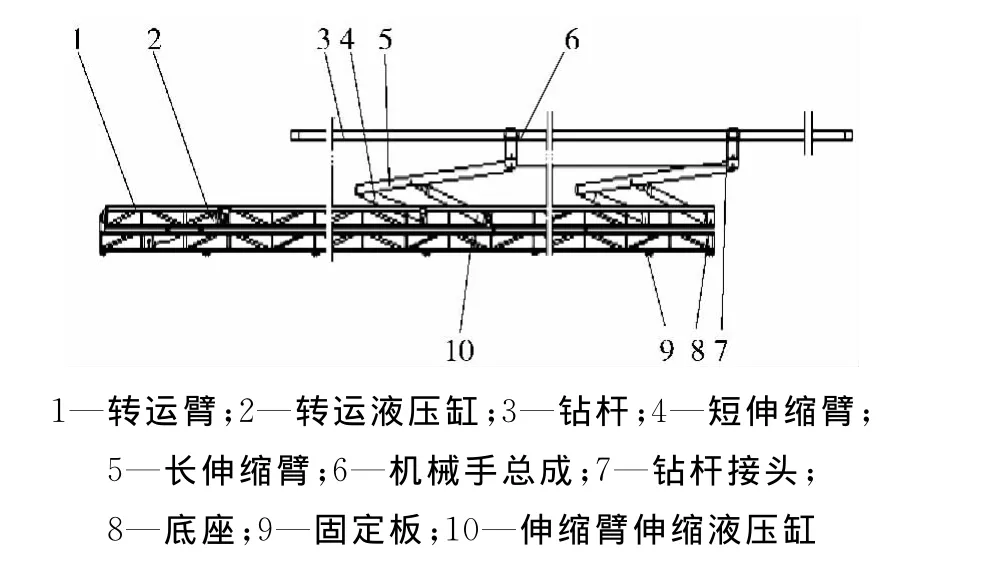
图1 钻杆自动转运系统结构
2.1 转运臂
转运臂的作用是实现钻杆从井架上的垂直位置转动到水平位置,是短伸缩臂、长伸缩臂、机械手总成、转运液压缸和伸缩臂伸缩液压缸的支撑部件。由于3根钻杆组合成的立根较长,因此转运臂总体采用等边角钢桁架结构,即节约了大梁的钢材,而且总体质量轻,结构稳定性也较好,经济上也比较合理。
转运臂由转耳、转耳连接钢板、大梁角钢、支撑角钢、辅助支撑角钢和连接钢板组成,基本结构如图2所示。
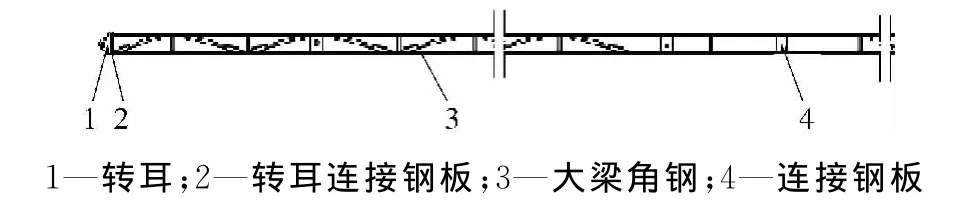
图2 转运臂结构
转耳连接钢板的功能是连接转耳与转运臂的大梁角钢,使转运臂能够从垂直位置转动到水平位置;大梁角钢的功能是为转运臂支撑短伸缩臂、长伸缩臂、机械手总成、转运液压缸和伸缩臂伸缩液压缸等提供安装条件;支撑角钢的功能是支撑大梁角钢,防止其发生弯曲和扭曲变形;辅助支撑角钢的功能是提高支撑角钢的抗弯扭变形的能力;连接钢板的功能是将短伸缩臂、长伸缩臂、机械手总成、转运液压缸和伸缩臂伸缩液压缸等部件连接在转运臂上。
2.2 长伸缩臂
长伸缩臂是实现机械手抓住的钻杆从井架上收缩到转运臂上和钻杆从转运臂上伸长到井架上2个过程,在长伸缩臂上安装有伸缩液压缸。由于海洋钻井平台上的井架底座长8m、宽8m,这就要求伸缩臂至少能够伸长4m,使钻杆能够到达井口的位置。考虑到钻杆自动转运系统距井架底座保持一定的距离,经过计算长伸缩臂的尺寸和形状如图3所示。
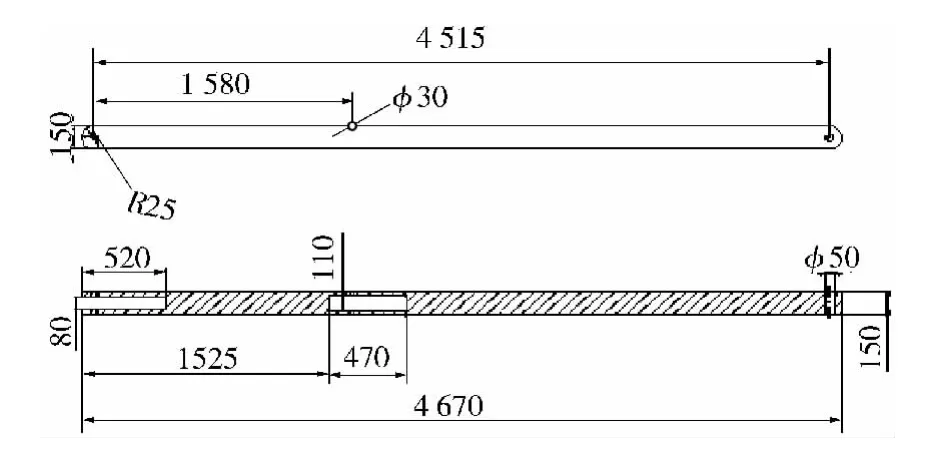
图3 长伸缩臂尺寸和形状
2.3 短伸缩臂
短伸缩臂是实现机械手抓住的钻杆从井架上收缩到转运臂上和钻杆从转运臂上伸长到井架上2个过程的辅助伸缩臂。经过计算短伸缩臂的尺寸和形状如图4所示。
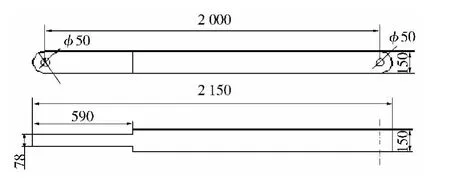
图4 短伸缩臂尺寸和形状
2.4 转运机械手总成
机械手总成的作用是在钻杆从井架上的垂直位置转动到水平位置的整个过程中紧紧抓住钻杆,使其不能从转运臂上滑脱。机械手总成主要由机械手指、抓紧液压缸和连杆3大部分构成,基本结构如图5所示。
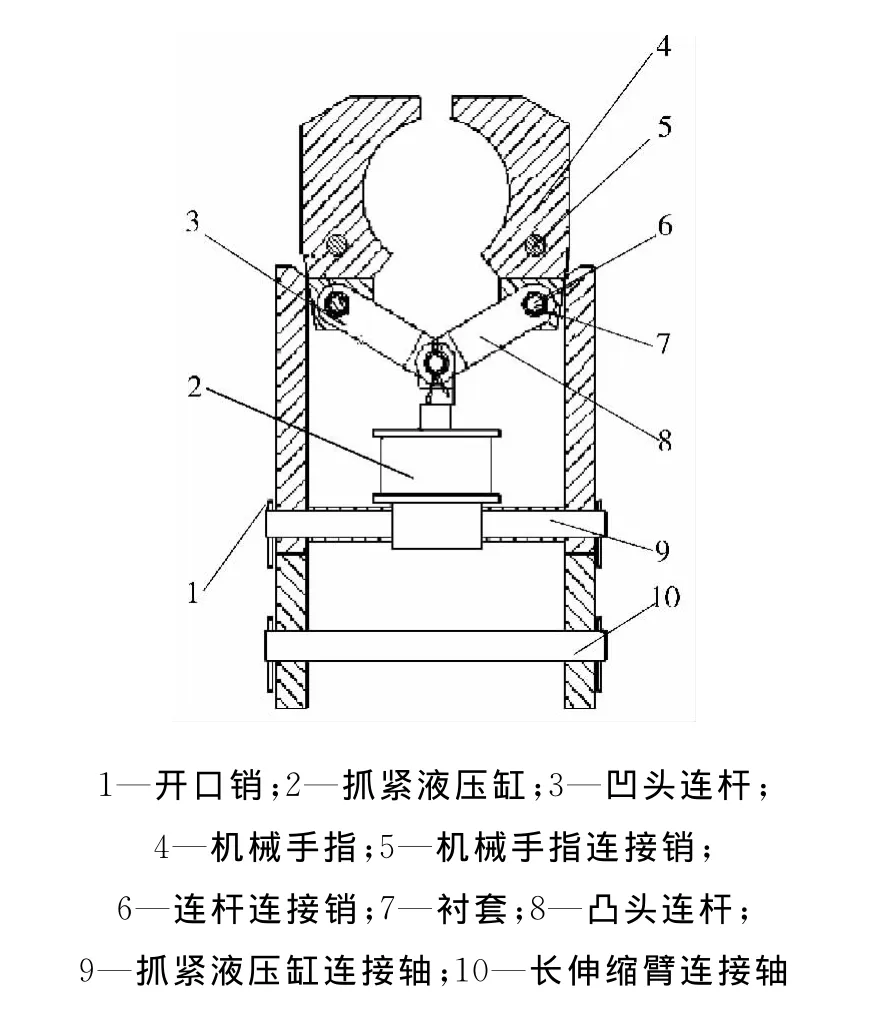
图5 转运机械手结构
3 钻杆自动移运系统结构设计
钻杆自动移运系统由移动小车、大梁、机械手总成、起升液压缸和钻杆架5部分组成,基本结构如图6所示。
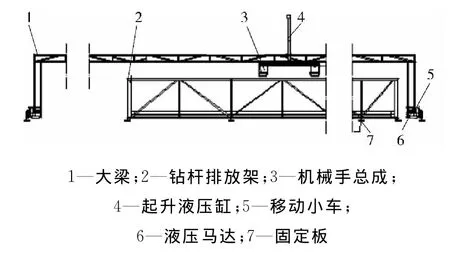
图6 钻杆自动移运系统结构
3.1 移动小车
移动小车的作用是提供水平方向的灵活稳定移动,是钻杆自动移运系统中的一个重要部件,由马达、传动齿轮、转动轴、车轮和车体组成。考虑到移动的平稳性和精确性,采用液压马达带动车轮转动,从而实现整体的移动,基本结构如图7所示。

图7 移动小车结构
3.2 大梁
大梁的作用是连接移动小车,并为起升液压缸提供安装位置[6],是3个起升液压缸的支撑部件。支撑角钢焊接在移动小车上,带动起升液压缸和钻杆与移动小车一起运动。大梁采用等边角钢桁架结构,可以提高起升液压缸的稳定性和精确性。基本结构如图8所示。
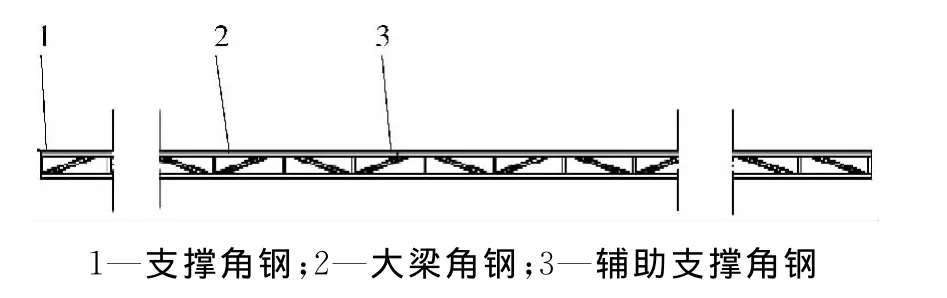
图8 大梁结构
3.3 移运机械手总成
机械手总成的作用是钻杆从转送臂上移动到钻杆排放架上的整个过程中紧紧抓住钻杆,使其不能从转运臂上滑落。主要由机械手指、抓紧液压缸和连杆3大部分构成,基本结构如图9所示。
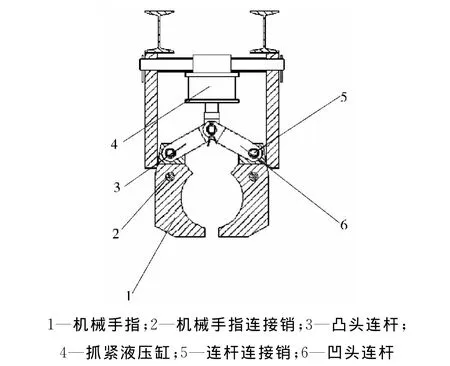
图9 移运机械手结构
3.4 钻杆排放架
钻杆排放架的作用是为钻杆存放和移动系统的精确排放提供一个架体,其基本结构如图10所示。

图10 钻杆排放架结构
分隔板的功能是将钻杆分隔开,提高钻杆排放的精确度;大梁角钢的功能是为支撑角钢提供焊接位置;辅助支撑角钢的功能是提高支撑角钢的抗弯扭变形的能力;底连接杆的功能是连接底部大梁角钢,并且还承受钻杆的重力;固定板的功能是将钻杆钻杆排放架牢牢地固定在海洋钻井平台上;支撑角钢的功能是支撑大梁角钢,防止其发生弯曲和扭曲变形。
4 结论
1) 分析了海上钻井过程中钻杆自动转运和移动系统的工作原理,并进行了结构设计。
2) 考虑系统的稳定性能,在钻杆转运和移运过程中都采用了液压系统,以实现较高的稳定性和精确性。
3) 该系统在各种工况下始终保持良好状态,磨损小。
4) 具有结构简单、拆装维修方便的特点。
[1]李继志,陈荣振.石油钻采机械概论[M].东营:中国石油大学出版社,2000.
[2]何 鸿.钻井平台钻杆自动化排放系统方案设计[J].石油矿场机械,2012,41(9):82-84.
[3]朱云祖.自动化钻井技术译文集[M].北京:石油工业出版社,1993.
[4]石美玉,杨国家,李富平,等.海洋钻机钻杆自动排放系统控制方案设计[J].石油矿场机械,2011,40(12):41-44.
[5]李富平,杨国家,石美玉,等.海洋钻机钻杆自动排放驱动装置方案设计[J].石油矿场机械,2011,40 (12):48-50.
[6]刘延俊,王守城,杨前明,等.液压与气压传动[M].北京:机械工业出版社,2006.
猜你喜欢
机床与液压(2022年16期)2022-09-19 07:03:24
辽金历史与考古(2021年0期)2021-07-29 01:05:50
设备管理与维修(2019年2期)2019-02-22 00:54:58
山东冶金(2018年5期)2018-11-22 05:12:18
铁道通信信号(2018年8期)2018-11-10 05:15:50
化工管理(2017年5期)2017-04-11 03:37:55
西安建筑科技大学学报(自然科学版)(2016年5期)2016-11-10 02:39:14
工程建设与设计(2016年1期)2016-02-27 10:50:18
中国科技纵横(2014年21期)2014-12-12 10:58:57
汽车科技(2014年6期)2014-03-11 17:46:19
