蓝莓植株中心定位与运行轨迹的研究
2013-09-06 03:11李志鹏郭艳玲王海滨
森林工程 2013年5期
李志鹏,郭艳玲,王海滨
(1.东北林业大学交通学院,哈尔滨150040;2.东北林业大学机电工程学院,哈尔滨 150040)
蓝莓果树是21世纪最具发展潜力的树种,蓝莓果市场需求庞大,是近几年世界发展最为迅速的、集营养与保健于一身的第三代果树。由于蓝莓果实软和果粒小,导致采摘困难,蓝莓的种植受到限制,发展机械化采摘,成为我国蓝莓产业的迫切需求和必然趋势。
蓝莓采摘机的车架是门式结构,在采摘过程中它横跨在蓝莓树上,并按照蓝莓树列的方向前进。要想实现自动采摘,就必须保证蓝莓采摘车避免和蓝莓树干发生碰撞干涉,因此必须对蓝莓采摘车的运行轨迹进行规划,确保采摘工作的完成。
1 采摘车行走轨迹规划的研究
1.1 蓝莓采摘车轨迹规划的步骤
首先利用图像识别技术得到蓝莓植株的轮廓,估计轮廓尺寸,得出的蓝莓植株中心位置并计算出蓝莓植株的中心线,并据此调整蓝莓采摘机车体的进给朝向,为轨迹引导和规划做准备。
其次蓝莓采摘机具有运动约束,只能前后运动和转动,而不能横向运动,而且在转动时有最小转弯半径的要求。
最后要考虑蓝莓采摘车的实际尺寸,提前预测运动方向,否则可能会造成蓝莓采摘机与植株距离太近而使蓝莓采摘机无法顺利进入采摘状态。蓝莓采摘车路径规划流程如图1所示。
1.2 蓝莓采摘车运行轨迹要求
(1)蓝莓树的高度和宽度不应超过门的高度和宽度太多。
(2)蓝莓采摘机是按照蓝莓树列的中心线运行。
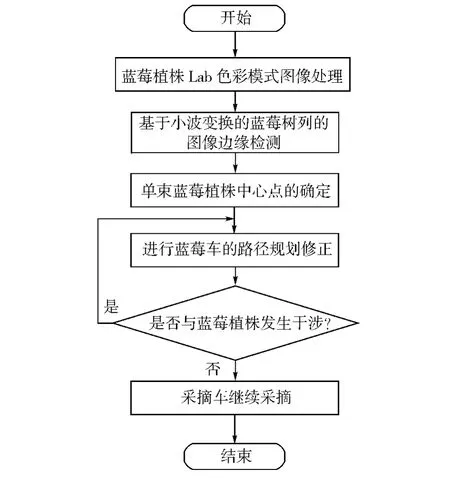
图1 采摘车路径规划流程图Fig.1 Flowchart of the path planning of the picking cart
(3)蓝莓采摘机在行进过程中不能越过中心线,这就使蓝莓采摘机的左右转动非常有限,与周围的环境障碍物必须保持最小的安全距离。
(4)在蓝莓列头转弯时,要充分考虑蓝莓采摘车最小转弯半径。
2 蓝莓植株中心线的确定
2.1 基于Lab色彩模式的蓝莓植株检测
Lab模式是根据 CommissionInternationale Eclairage(CIE)在1931年所制定的一种测定颜色的国际标准建立的。它是CIE组织确定的一个理论上包括了人眼可以看见的所有色彩的色彩模式。Lab模式弥补了RGB和CMYK两种色彩模式的不足。图2为原始图像,图3是在Lab颜色空间的蓝莓图像[1]。

图2 原始蓝莓图像Fig.2 Original blueberry image
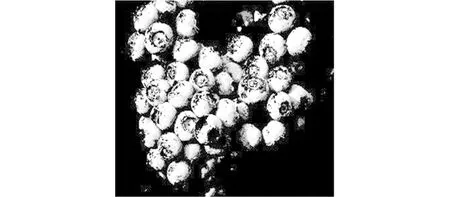
图3 Lab颜色空间的蓝莓图像Fig.3 Blueberry image lab color space
2.2 基于小波的蓝莓植株图像边缘检测
小波变换是一种信号的时间—尺度分析方法[2],它在时频两域都具有表征信号局部特征的能力,对任意信号f(t)∈L(R)2,f(t),的连续小波变换定义是:

称Ψ(t)小波,当母小波成为小波时,可由Wf(a,b)恢复出原信号f(t)。

图像f(x,y)为二维函数和不同尺度α上的光滑函数θσ(x,y)卷积将使图像f(x,y)被光滑,以二进制的小波变换表示,即取α=2j则有:
二进小波变换分别是在尺度α=2j时所平滑图像f(x,y)沿水平方向和垂直方向的部分导数,它对应于图像水平方向和垂直方向的边缘信息,可被看作所平滑图像后的梯度矢量的模和幅角,因此只需沿梯度矢量方向检测模的极大值点的位置,就给出了图像的一个多尺度边缘[3]。
2.3 单株蓝莓植株中心点的估算
蓝莓采摘机行走轨迹的中心线即根据两条随意不相交的曲线,求解出一系列位于不同位置但在曲线之间的点,满足点到两条曲线的距离最短且距离相等,然后由这些点连接起来,就可成为两条曲线间的中心线。例如设这两侧极限边缘点的坐标分别为 (xi,yi)和 (xj,yj),则求出两侧极限边缘点中心坐标为 (xk,yk),并根据公式可以导出两点连线的斜率T和中垂线的斜率k。
对于每一个直线方程,以所求的中心点为起点,由中垂线斜率判断该小段曲线的方向性,并相继对该点相对应的变量的横坐标累加或者累减一个步长,用直线方程求解对应的纵坐标,根据距离公式:

求出这对坐标到中点的距离d,载入曲线下边的数据,扫描数据得出变量对到曲线下边点的距离l,设曲线下边的点的坐标用 (xi,yi)表示:

同时循环地将两个距离的差的绝对值|l-d|与精度q作比较,当满足|l-d|<q时,此时的变量对坐标就是要求的曲线中心中的一点[4]。
2.3 中心线检测实验
采用自主研发的蓝莓自动采摘机,单边驱动。图片采集采用CCD摄像头,安置在车架门楣处,此时若行走方向端正,可得到蓝莓植株的正向图片,但如行走方向偏转,方向也会随之变化,图4是单株蓝莓植株。

图4 单株蓝莓植株Fig.4 Single blueberry plant
地面长期覆盖黑色农膜,起到防止杂草生长、保持土壤水分及保温的作用。黑色农膜与蓝莓颜色接近,故进行图像分割时,应先对蓝莓树丛进行分割识别,如图5所示。
拍摄的图像经过去噪后,通过公式 (4)和公式 (5)求出蓝莓植株中心线和实际的蓝莓植株测量获得表1,蓝莓植株实际中心线与图像中心相差100个像素,正数表示绿树中心线在图像中心线左侧,负数表示在图像中心线右侧,因此蓝莓采摘机应按要求调整行进方向[5]。
图5 降噪后的蓝莓植株Fig.5 The image of blueberry plants after denoise processing

表1 中心线实际测量 单位:pixTab.1 The actual measurement of the center line pix
3 结论
通过对蓝莓植株现场测量和图像分析测试对比,二者基本吻合,说明通过图像处理能够真实地反映蓝莓植株的中心位置,能引导蓝莓采摘车按照蓝莓植株中心位置进行运动,为蓝莓采摘机轨迹规划做好了准备。
】
[1]张宏建.Lab色彩模式在图像处理中的应用[J].福建电脑,2011(1):146-147.
[2]梁亦强,李正明,孙 俊.一种新小波图像降噪方法在农业采摘中的应用[J].安徽农业科学,2010,38(4):2061 -2063.
[3]蔡汉添.小波变换域中图像噪声平滑技术[J].光学技术,1998(6):6-9.
[4]司永胜,姜国权,刘 刚,等.基于最小二乘法的早期作物行中心线检测方法[J].农业机械学报,2010,41(7):163 -167.
[5]李志鹏,赵德金,郭艳玲.基于Matlab蓝莓树枝轴向有阻尼自由振动仿真研究[J].森林工程,2013,29(4):53 -55.
猜你喜欢
河北果树(2021年4期)2021-12-02
科技风(2021年19期)2021-09-07
音乐教育与创作(2020年2期)2020-06-19
电子制作(2019年13期)2020-01-14
制造技术与机床(2017年10期)2017-11-28
商周刊(2017年5期)2017-08-22
作文周刊·小学一年级版(2017年26期)2017-08-10
中外医疗(2015年5期)2016-01-04
浙江理工大学学报(自然科学版)(2015年5期)2015-03-01
电测与仪表(2014年8期)2014-04-04