单幅未标定像片进行树木形态测量的新方法
2013-09-06 03:11隋铭明高天宇
森林工程 2013年5期
隋铭明,高天宇
(1.南京师范大学地理科学学院,南京210046;2.南京林业大学土木工程学院,南京 210037)
树木测量在城市建设、城市绿化和珍贵树木保护等方面发挥着重要作用。树木形态尺寸测量是树木测量的重要内容,主要包括树高、胸径和冠幅等指标的测量[1]。
本文主要以树木形态尺寸测量为目标,提出了一种基于单幅未标定像片进行树木测量的新方法,该方法具有不需直接接触、可重复测量和便捷等特点,克服了现有测量方法的诸多缺陷,是对现有方法的重要补充,能够实现树高、胸径和冠幅等参数的快速、准确测量。
1 树木形态测量的现有方法及其不足
1.1 树木形态测量的内容
树木的形态尺寸测量,内容主要包括:树干胸径(直径或周长)、树高和树冠直径,还可能包括树干数目、树冠下净空高度、树根保护范围半径、树干倾斜方向和树冠覆盖范围等,如图1所示。
胸径是胸高直径的简称,又称干径,是立木测定的最基本因子之一。在美国,量度胸径的高度是离地1.372 5(m),在我国是在距离地面1.3 m的地方量测[2]。胸径常用的表示方法有周长表示法和直径表示法。树高是指树冠最高点到树根所处位置的地面之间的高差,即基准点到最高点所在参考面的距离,即高度[3]。树冠直径是指树冠最大位置的尺寸,也称为冠幅。有些情况下会要求确定树冠的分布状态,即在东、西、南、北四个方向的伸展尺寸。
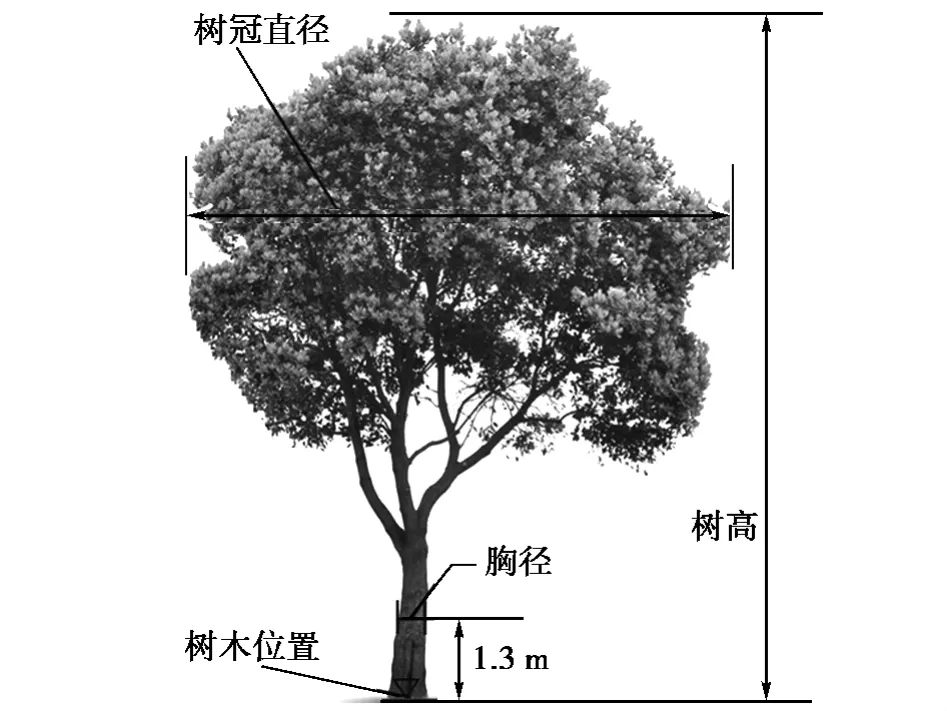
图1 树木形态参数Fig.1 Tree shape and size parameters
1.2 几种树木形态参数测量的方法及不足
1.2.1 传统树木形态参数测量方法
传统的树木形态量测方法一般是采用目估法或者借助钢尺、测距仪和全站仪等工具进行。如精度要求不高的情况下,树高和树冠测量普遍采用目估的方法。传统胸径测量方法主要是用钢尺或皮尺在规定的位置量取树干的周长,或者利用弯轮尺和扇形尺和游轮卡尺等工具直接测量树干直径。在准确度和精度要求较高的情况下,树高和树冠测量一般是采用全站仪的无棱镜测量方式、手持激光测距仪等方法进行[3]。
1.2.2 地面激光扫描仪测树
地面激光扫描仪是通过外业架设激光扫描仪对树木进行扫描,获取稠密激光点云数据,并通过内业点云数据处理进行树木参数测量[4-5]。该方法可快速获取大量的空间信息,工作效率高、强度小。但对仪器架设和数据处理有较高要求,很多仪器有扫描盲区不宜架设距离太近,外业噪声数据较多,内业数据处理工作量大,且没有很好的自动化手段。此外仪器价格昂贵,不便于携带,影响了它大范围的推广使用。
1.2.3 基于数字图像处理测树
基于数字图像处理测树的方法通常是利用图像处理算法对图像进行预处理、图像分割、边缘提取等操作,识别出待测目标再进行量测[6]。该方法可减轻外业测量工作量,但内业技术含量较高,图像处理算法复杂,计算机自动分割和轮廓提取精度不高,且对拍摄角度有一定要求。
1.2.4 机载Lidar或航空影像测树
机载Lidar是一种主动式对地观测系统[7],它利用多次回波技术,获取森林结构的三维信息,估计森林的垂直参数,突破了传统遥感技术只能获取冠层的水平分布信息,无法获取垂直信息的瓶颈。国内外学者已成功地运用这一技术提取森林的垂直结构信息。国内也有学者采用大光斑激光雷达全球观测数据GLAS(Geoscience laser altimeter system),对波形数据进行处理与分析,反演树高和生物量[8]。该方法比较适合大范围森林监测,对于单木测量受分辨率和噪声等因素影响较难开展。
除上述方法,还有一些测树方法,例如基于近景摄影测量的方法[9-10],研制专用测树仪进行树木测量[11]。但该方法需要知道相机参数信息,或者需要通过立体像对来实现。
综上所述,树木测量虽然技术要求不高,但工作难度却很大。采用全站仪测量时的通视条件要求苛刻,工作量会因此而成倍增加。三维激光扫描仪被广泛应用的同时还存在一定局限性,比如仪器的价格偏高,应用于树木扫描时有相互遮挡等,这都限制了在林业方面的应用。因此,需要寻找一种快速、简易和准确的测量方法。为此,本文采用基于单幅像片的树木测量方法。
2 单幅像片树木形态参数测量的原理
基于单幅未标定像片进行树木测量方法的基本原理是利用拍摄树木的普通数码照片进行测量,采用像片摄影前后的不变量-交比对像片进行解析,在一定已知距离的支持以及灭点灭线辅助下,推导出未知线段距离量测算法,将其应用到树木各项形态参数的测量。
单幅普通数码像片包含的信息量有限,但根据拍摄场景的不同,有很多信息可以挖掘用于量测,比如直线平行关系、垂直关系和共面关系等[12-13]。在拍照时,也可以人为在拍照时注入一些信息,比如放置拍摄模板,选用已知长度目标等,在此基础上可以实现单幅像片的几何量测。本节分别推导了与已知线段满足共线关系以及二维共面关系的线段距离量测。
2.1 交比定义及其扩充
交比是摄影几何中的基本不变量[14],通常由共线的四点来定义,如图2所示。A、B、C、D代表现实空间中的共线四点,a、b、c、d是它们在像片上的对应点,SAB代表AB两点的实地距离,Sab是图上距离。共线四点的交比定义如下,且交比的数值在投影前后保持不变,参见公式 (1)。

灭点是空间一组平行线的无穷远点在影像上的构像,即该组平行线在影像上的直线影像的交点。在共线四点中,用灭点V代替直线上的D点,交比的定义依然有效,如公式 (2)所示:
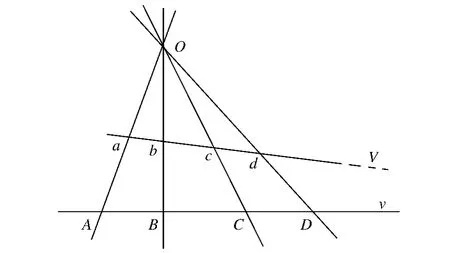
图2 交比及共线距离量测Fig.2 Cross ratio and collinear distance measurement
2.2 基于交比和灭点的共线距离量测
在实地中灭点通常是趋向于无穷远的,因此SBV是趋于无穷大的。将公式 (2)的分子分母同时除以SBV,变为:
等式右边可以直接在图上量测获得,代入公式(3)可以计算出交比值CR1。若AB两点的实地距离已知为D,则可以计算出BC两点间的实地距离:

则AC两点间距离也可以求出:

两点间的可以用类似的方法计算AD,CD距离:
通过上述分析可知,如果已知直线灭点和直线上的一段距离,则可推出直线上的任意两点间的距离。
2.3 共面线段距离量测
为了进一步实现单幅未标定图像上距离量测向二维和三维的推广,需要增加新的约束条件。本节中利用一个边长已知的矩形 (或两组相互垂直的平行线),推导了与该矩形共面的同一个平面上未知线段的距离量测算法。
如图3所示,abcd是平面上某矩形的成像,矩形两条边的实际长度为S1和S2,p1p2的实际长度为待求距离。直线p1p2分别与矩形四条边的延长线相交于j1、j2、j3和j4四点。vp1和vp2是两组平行线形成的两个灭点,vl为该平面的灭线,直线j1j2j3j4与灭线交于点vp3。
实现平面上的二维量测的关键是将待量测线段分解到与已知线段共线的直线上,再按一维量测的方法求出待求线段长度。
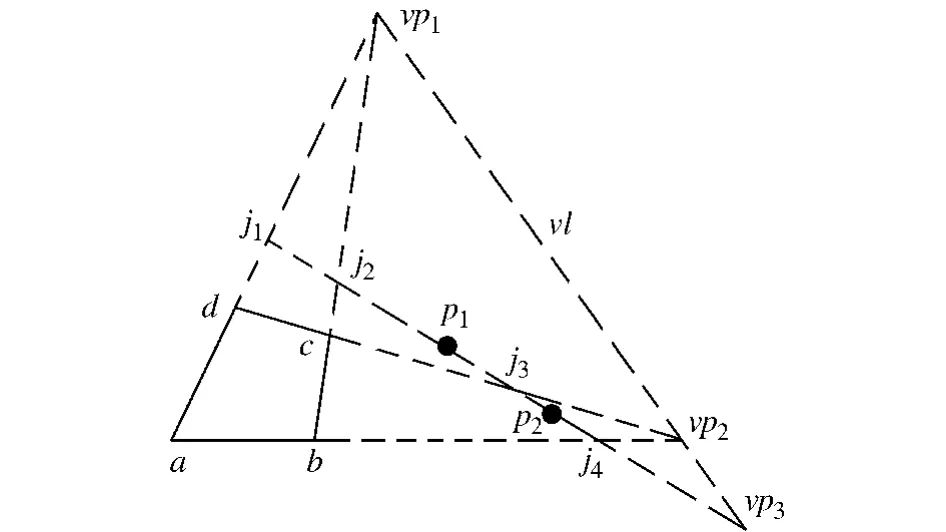
图3 平面上的距离量测情形Fig.3 Distance measurement on a plane
如图3所示,首先可求出与矩形两条边共线的线段cj2和cj3的实际长度,然后,根据勾股定理,可求出直角三角形cj2j3的斜边j2j3的实际长度,进而,利用一维量测的原理推求出待求线段p1p2的实际长度。
3 实例分析
为检核基于单幅未标定像片进行树木量测的正确性和精度,本文设计了一个实验。在待测树木旁放置一个矩形模板,其长度和宽度为60 cm×60 cm,作为测量的已知条件,同时在树木上标记出胸径线所在位置。按第二节中的算法用Matlab编写了基于单幅像片的树木量测程序,对单木的胸径、树高和冠幅等树木形态参数进行了测量,量测界面如图4所示。

图4 树木量测程序界面及量测结果Fig.4 Program interface and measurement results
采用全站仪对该树木的树高和冠幅进行实地测量[15],并计算出树高和冠幅[16],观测量如图5所示。

图5 全站仪测树Fig.5 Tree measurement using total station

树高计算采用公式 (6),冠幅计算参见公式(7)。胸径线距离地面高度用钢尺测得,胸径采用周长法量测后化算成直径。
公式中S为仪器到棱镜的水平距离,L为倾斜距离,H代表树高,瞄准树高时的天顶距为α1,瞄准棱镜时的天顶距为α2,棱镜处的树干半径为R,棱镜的厚度为C,棱镜的高度为h。仪器瞄准棱镜的天顶距为α东,仪器到该棱镜时的水平距离为S东,倾斜距离为L东,仪器对两棱镜的夹角为θ,东向冠幅为C东,其他参数同上。

实验中分别对对称的两个方向测算出冠幅,例如东西向,两个方向的加和即为该树的东西向冠幅。
将全站仪测算得到的结果作为参考值来检核算法的精度。像片量测中先提取模板两组平行边界,计算在两个方向的灭点坐标,由两个灭点确定灭线方程,给出模板的长度和宽度作为已知长度,按本文算法量测待求长度。在像片上对胸径、树高和冠幅三个指标进行了多次量测,取平均值作为最后的结果,与参考值进行比较,结果见表1。
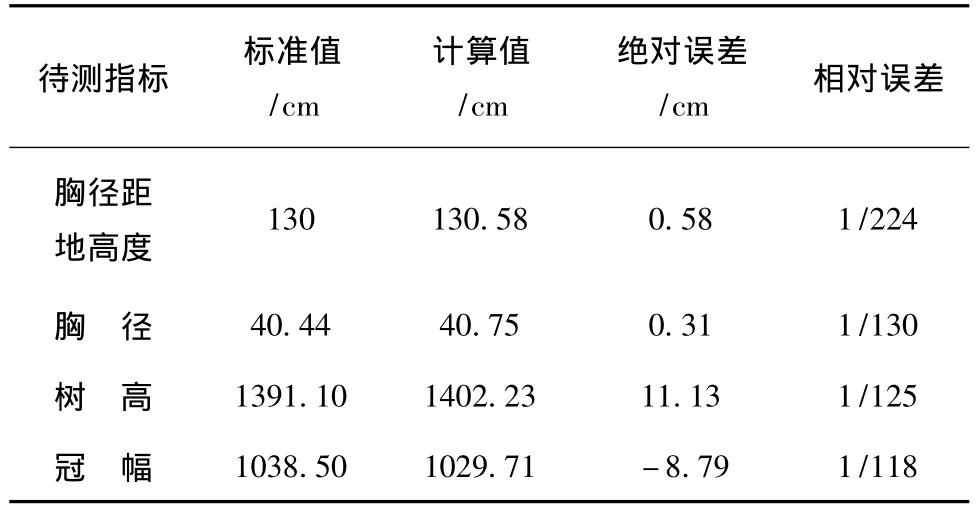
表1 树木形态量测结果Tab.1 Results of tree measurement
4 总结与讨论
本文在分析总结现有树木测量方法优缺点的基础上,提出了一种基于单幅未标定数码像片进行树木测量的新方法,该方法简单、快捷且易于实现,可根据个人的需求和判断进行不限次数的,符合个人需求的量测,有效降低劳动强度。树木形态参数测量的实例分析表明,该方法量测结果正确,精度能满足树木量测的要求,较适用于树木枝干清晰,顶端和冠幅边界能分辨的树木量测。
但该方法也有一定的不足,比如在图上进行直线选取的时候,由于像片分辨率等因素的影响会带来一定的偏差。另外,单张像片信息量有限,对较茂密的树木拍摄距离较远,需要满足拍摄条件并选择较大的模板。
】
[1]刘 敏,何高波.树木测量的作业流程和方法研究——以香港树木测量为例[J].矿山测量,2009(6):50-56.
[2]Abed T,Stephens N C.Tree measurement manual for farm foresters[M].Canberra A.C.T.Bureau of Rural Sciences,2003.
[3]董 斌.基于全站仪的林业数据自动测算系统[J].南京林业大学学报(自然科学版),2005,29(5):119 -122.
[4]李 超,程 浩,王 芳.三维激光扫描仪在林木测量方面的应用[J].测绘通报,2011(11):84-85.
[5]韩光瞬,冯仲科,刘永霞,等.三维激光扫描系统测树原理及精度分析[J].北京林业大学学报,2005,27(S2):187 -190.
[6]宋小春,康宜华,武新军,等.基于数字图像处理的林木自动测量系统研究[J].计算机工程与设计,2005,26(5):1187 -1189.
[7]Weishampel J F,Blair J B,Knox R G,et al.Volumetric lidar return patterns from an old-growth tropical rainforest canopy[J].International Journal of Remote Sensing,2000,21(2):409 -415.
[8]于 颖,范文义,李明泽,等.利用大光斑激光雷达数据估测树高和生物量[J].林业科学,2010,46(9):84 -87.
[9]陈义伟,李春友,张劲松,等.基于多基线近景摄影测量系统的树木形态结构测定技术的研究[J].安徽农业科学,2012,40(8):4628-4630.
[10]Persson A,Holmgren J,Soderman U.Detecting and measuring individual trees using an airborne laser scanner[J].Photogrammetric Engineering and Remote Sensing,2002,68(9):925 -932.
[11]刘发林,曾思齐,鄢前飞,等.数字式多功能测树仪的研制[J].中南林业科技大学学报,2012,32(4):41-44.
[12]沙月进.基于相对控制的影像解析及三维测量技术研究[D].南京:南京师范大学,2008.
[13]王美珍.单幅图像中地物目标几何量测研究[D].南京:南京师范大学,2011.
[14]王美珍,刘学军,甄 艳,等.基于交比的单幅图像平面几何信息提取算法研究[J].武汉大学学报信息科学版,2011,36(2):190-194.
[15]冯仲科,韩熙春,周科亮,等.全站仪固定样地测树原理及精度分析[J].北京测绘,2003(1):29 -30.
[16]欧文琳.浅谈如何用全站仪调查古树名木[J].山东林业科技,2007(6):68-70.
猜你喜欢
北京航空航天大学学报(2022年8期)2022-08-31
丽水学院学报(2022年2期)2022-04-19
绿色天府(2022年2期)2022-03-16
林业科技情报(2021年3期)2021-09-01
现代测绘(2018年3期)2018-09-13
传感器与微系统(2018年7期)2018-08-29
中南林业调查规划(2017年1期)2017-12-19
科学与财富(2017年19期)2017-07-19
长江工程职业技术学院学报(2017年2期)2017-06-19
自动化学报(2017年11期)2017-04-04